El documento describe los modelos matemáticos de sistemas dinámicos y su importancia para la predicción del comportamiento y mejora de sistemas. Explica que los simuladores se basan en modelos matemáticos de los componentes de los sistemas y las señales que les afectan, y que la validez de los simuladores depende de la aproximación entre los modelos y los comportamientos físicos reales. También analiza modelos de sistemas eléctricos y electrónicos como cuadripolos RC.































![Capítulo 4: Modelado de los sistemas dinámicos Apuntes de Regulación Automática
di t
( ) ( ) e t
( )
( )
a
u t = R i t + L +
e a a a b
dt
e (t) k (t) b b m = w
T (t) k i (t) m i a =
d
2
q q
T J m
dt
B
d
= + 2
dt
m
m
m m
(4. 22)
(4. 23)
(4. 24)
(4. 25)
donde ki es la constante de par, [Nm/A], y kb es la constante de la fuerza
contraelectromotriz, [V s/rad]. Tomando transformada de Laplace a ambos lados de la
igualdad y considerando condiciones iniciales nulas, el conjunto de ecuaciones algebro-diferenciales
quedará definido por las siguientes FDTs:
u (s) (R sL )i (s) e (s) e a a a b = + +
e s k (s) b B m ( ) = w
T (s) k i (s) m i a =
T (s) (J s B ) (s) m m m m = + w
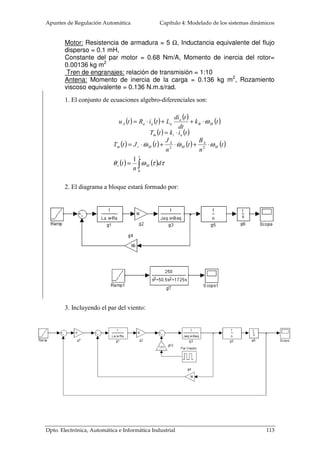
El diagrama a bloques del motor quedará como:
1
s
1
Jm.s+Bm
Kp
1
La.s+Ra ia(s) Tm(s)
w(s)w(s)
(4. 26)
(4. 27)
(4. 28)
(4. 29)
u(s) pos(s)
Kb
w(s)
Del esquema se desprende que existe una realimentación interna en el motor que
tiende a garantizar la estabilidad del funcionamiento. Su causa es que la f.c.e.m. se
opone con mayor fuerza a medida de que aumente la velocidad angular del rotor.
4.3.1.2.1 Relación entre ki y kb
La mayor parte de la potencia eléctrica dada al motor es convertida en potencia
mecánica. La potencia útil será la corriente de la armadura por la f.c.e.m.. Ésta será
convertida en par mecánico por velocidad angular. Empleando las expresiones (4. 23) y
(4. 24) se demuestras que las constantes del motor son idénticas, aunque a veces, los
fabricantes suelen dar el valor de kb invertido y en rpm por voltio:
92 Dpto. Electrónica, Automática e Informática Industrial](https://image.slidesharecdn.com/4modelado-141120112343-conversion-gate01/85/4-modelado-35-320.jpg)
![Apuntes de Regulación Automática Capítulo 4: Modelado de los sistemas dinámicos
m a b m m P = i .e = T .w
a b i a m a b m i a m i .e = k .i .w ® i .k .w = k .i .w
k k [N m A] [V s rad] i b = . / º . /
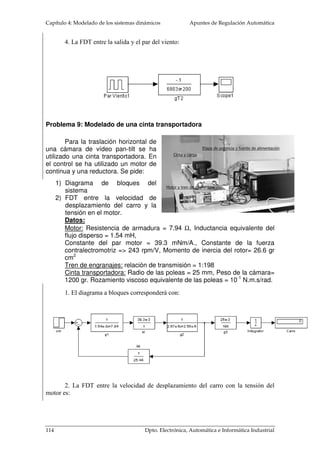
4.3.1.2.2 Curvas del par-motor
(4. 30)
(4. 31)
(4. 32)
Una de las curvas típicas de los motores, con independencia de la tecnología, es
la relación entre la velocidad angular y el par motor. Las gráficas muestran curvas de
comportamiento en el régimen permanente. Para el caso de los motores de c.c. de
imanes permanente, según la ecuación (4. 22), la corriente continua de frecuencia nula
por la armadura es:
V k
− w
E b m
a
=
a R
I
(4. 33)
Mientras el par mecánico en el régimen estacionario valdrá a partir de la ec. (4.
24):
−](https://image.slidesharecdn.com/4modelado-141120112343-conversion-gate01/85/4-modelado-36-320.jpg)