

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (11)
Similar a Serie1 semestreagosto2012
Similar a Serie1 semestreagosto2012 (20)
Serie1 semestreagosto2012
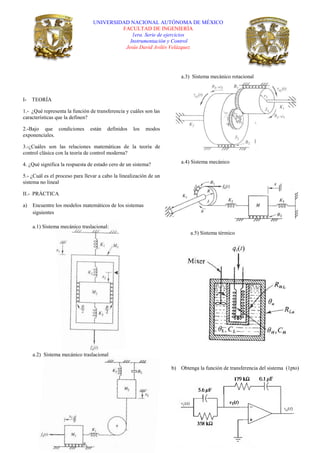
- 1. UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA 1era. Serie de ejercicios Instrumentación y Control Jesús David Avilés Velázquez a.3) Sistema mecánico rotacional I- TEORÍA 1.- ¿Qué representa la función de transferencia y cuáles son las características que la definen? 2.-Bajo que condiciones están definidos los modos exponenciales. 3.-¿Cuáles son las relaciones matemáticas de la teoría de control clásica con la teoría de control moderna? 4. ¿Qué significa la respuesta de estado cero de un sistema? a.4) Sistema mecánico 5.- ¿Cuál es el proceso para llevar a cabo la linealización de un sistema no lineal II.- PRÁCTICA a) Encuentre los modelos matemáticos de los sistemas siguientes a.1) Sistema mecánico traslacional: a.5) Sistema térmico a.2) Sistema mecánico traslacional b) Obtenga la función de transferencia del sistema (1pto)
- 2. i) Obtenga el modelo en espacio de estados del siguiente c) Considere el circuito RC de la siguiente figura. circuito. Suponemos las condiciones iniciales son nulas. Encuentre la respuesta i(t)=? d) Resuelva la ecuación diferencial j) Encuentra las ecuaciones dinámicas del espacio de estado t x 2x 10x e para el sistema e) Encuentre la función de transferencia para el sistema descrito por f) Encuentre la respuesta de estado-cero del sistema Con una entrada g) El capacitor en el siguiente circuito está descargado para t<0, y el switch es cerrado a partir de t=0. Encontrar Vc(t)=? k) Encuentra las ecuaciones dinámicas del espacio de estado del sistema siguiente y la función de transferencia L s E A s h) Encuentre la transformada de salida de Xs K 1 s 3 2 s 2
- 3. l) Considere el sistema de tres tanques. Encuentre la linealización de este sistema. (2 puntos) n) Reducir el siguiente diagrama de bloques Donde m) Encuentra el diagrama de bloques para el sistema siguiente. Además, en simulink implementa el sistema y gráfica la variable y(t) a 2 ÿ a 1 y a 0 y ut Con a 2 a 0 1; a 1 2