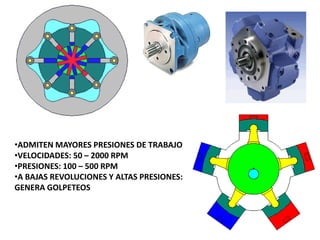
Este documento describe diferentes tipos de motores hidráulicos, incluyendo motores de engranajes, motores de paletas, motores de pistones radiales y motores oscilantes. Explica sus principios de funcionamiento, rangos típicos de velocidad y presión, y aplicaciones comunes.