

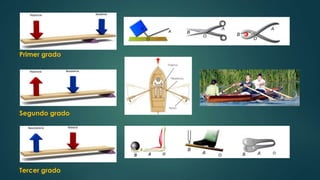

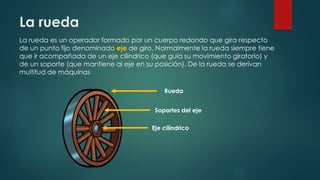








El documento describe las máquinas simples, incluyendo la palanca, el plano inclinado y la rueda. También explica los diferentes tipos de movimientos mecánicos, como el movimiento giratorio y lineal, y cómo las máquinas compuestas combinan varias máquinas simples. Además, define los operadores mecánicos y cómo forman parte de mecanismos y máquinas.




















































































