Descargado 11 veces








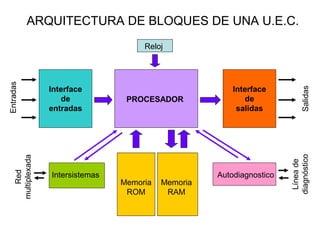




















































El documento describe los sistemas electrónicos de control en automóviles. Comenzó con la introducción de la inyección electrónica de combustible que mejoró el rendimiento del motor. Ahora, el control electrónico se aplica a todos los sistemas del automóvil como el motor, la tracción, la seguridad y el confort. Los sistemas constan de sensores, una unidad electrónica de control y actuadores.



























































