Descargado 386 veces




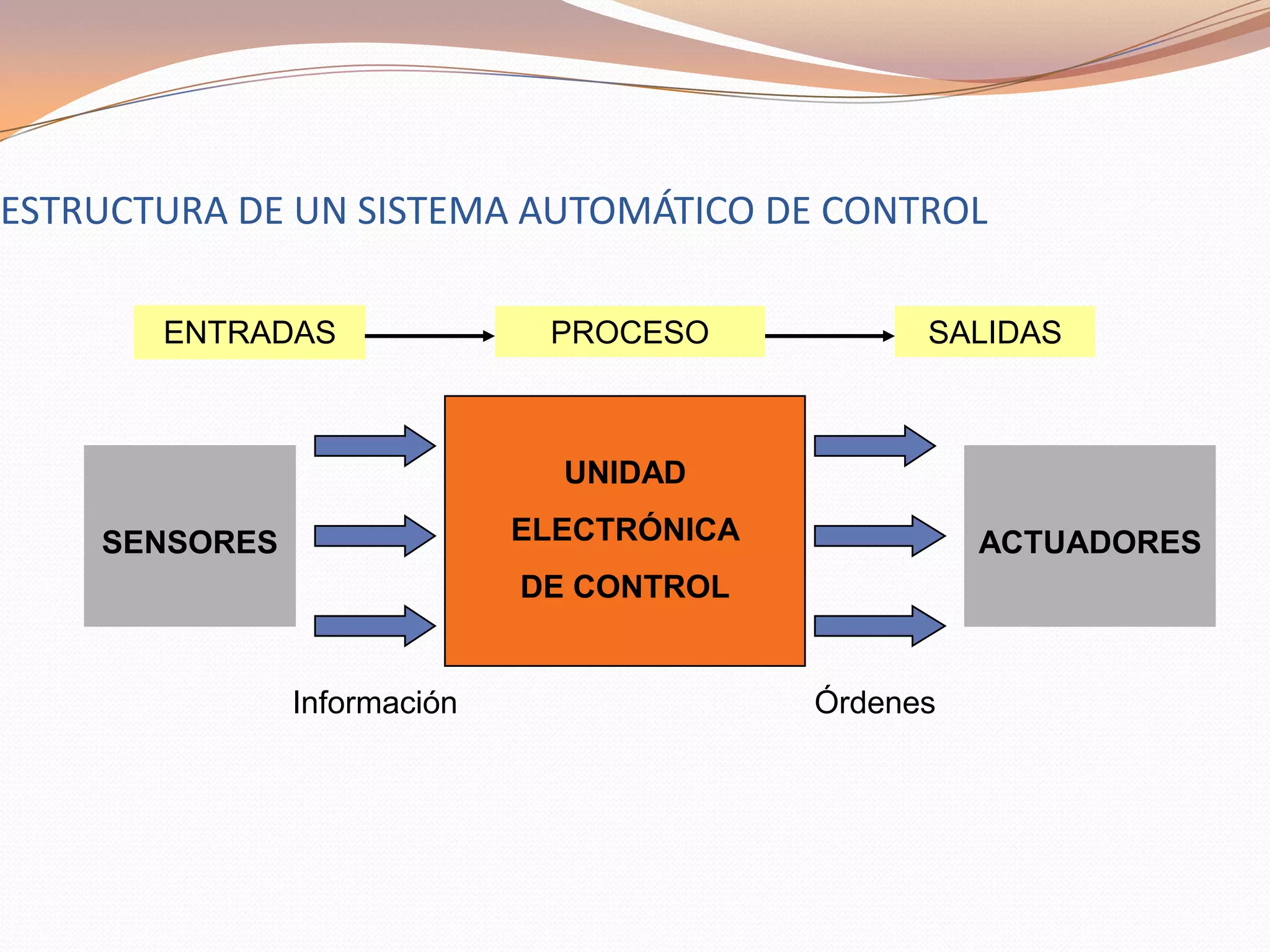
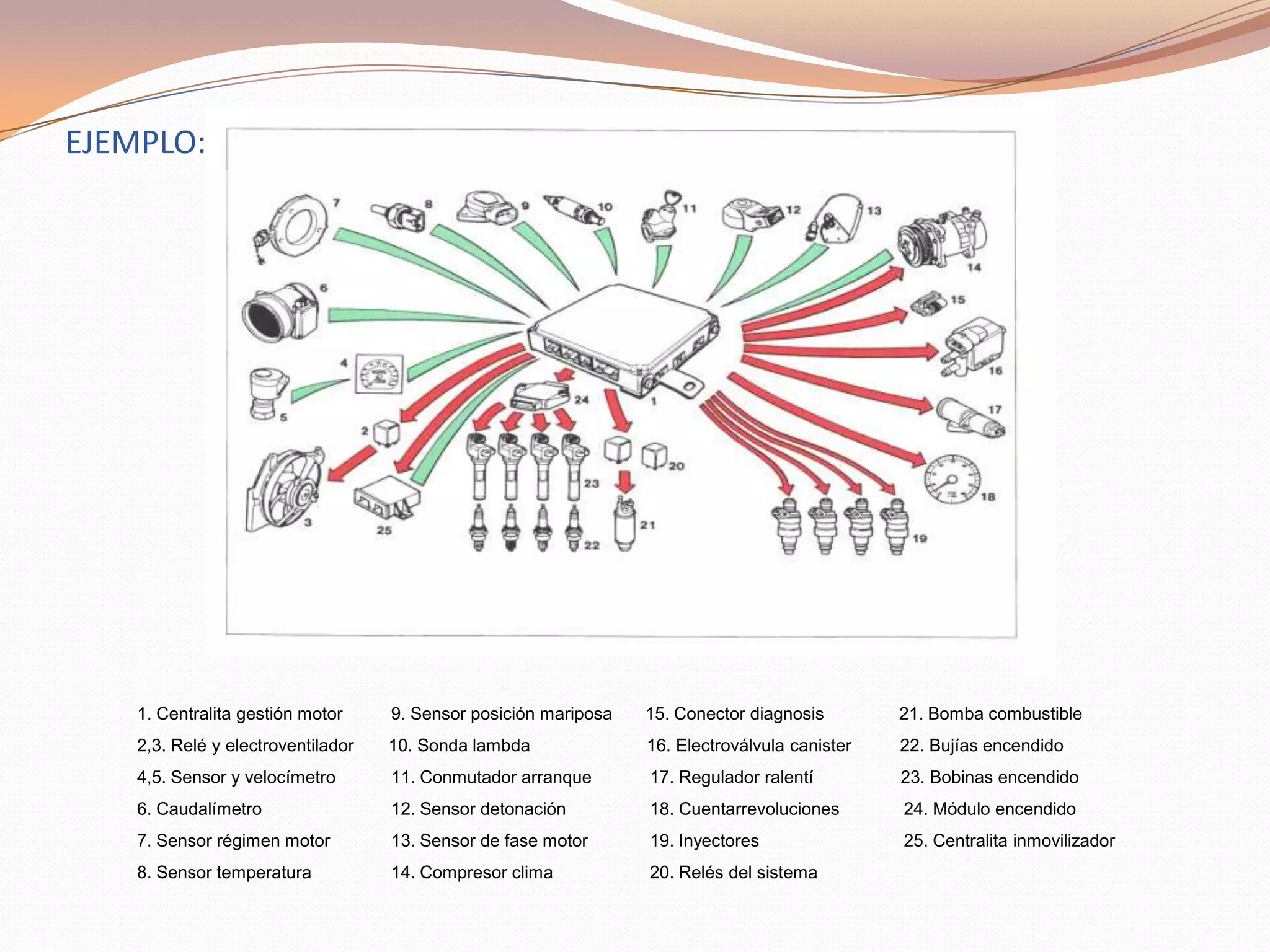





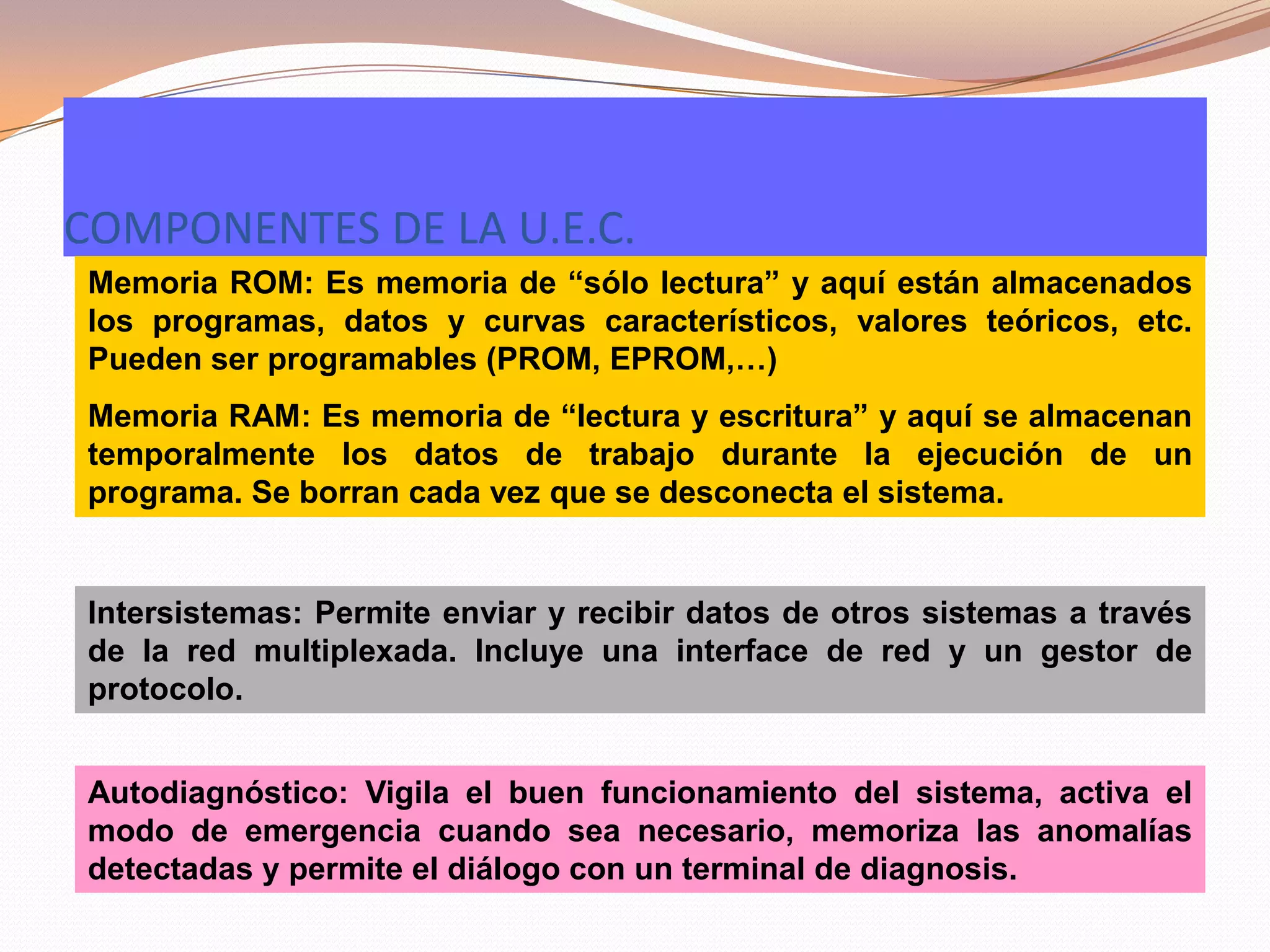




Este documento trata sobre los sistemas electrónicos de control en automóviles. Explica que estos sistemas comenzaron con la inyección electrónica de combustible y cómo funcionan mediante sensores, una unidad electrónica de control y actuadores. También describe los componentes clave de una unidad electrónica de control como el procesador, las memorias y las interfaces de entrada y salida.























































































