Descargado 12 veces


![Universidad Nacional de Ingeniería | IEEE INTERCON 2011, Lima, Perú
INTRODUCCIÓN
La integración de dispositivos
comerciales, estandarizados y de uso
masivo, tipo off-the-shelf junto con
elementos tradicionales de la
electrónica y la mecatrónica, dan un
matiz de flexibilidad y usabilidad
adicional a estas aplicaciones [1] [10]
4 15/08/2012](https://image.slidesharecdn.com/plataformamovil-120815114822-phpapp01/85/Plataforma-movil-4-320.jpg)
![Universidad Nacional de Ingeniería | IEEE INTERCON 2011, Lima, Perú
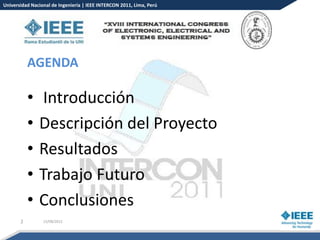
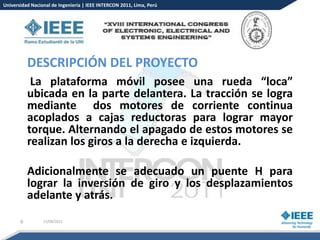
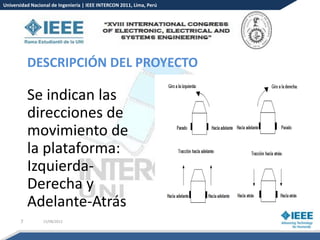
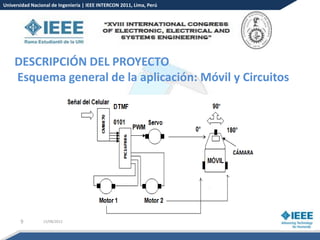
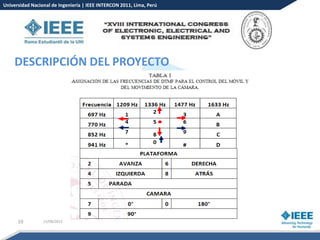
DESCRIPCIÓN DEL PROYECTO
La plataforma es controlada utilizando DTMF (Dual
Tone Multi-Frequency), la combinación de dos
frecuencias por dígito tecleado, se aprovecha a partir
de una llamada realizada con un teléfono celular a
través de la red GSM comercial [6].
En la plataforma está ubicado un teléfono celular, el
cual contesta de manera automática para posibilitar la
decodificación de los tonos (CM8870) y el telecontrol
intermediado por el microcontrolador de 8-bits.
8 15/08/2012](https://image.slidesharecdn.com/plataformamovil-120815114822-phpapp01/85/Plataforma-movil-8-320.jpg)

![Universidad Nacional de Ingeniería | IEEE INTERCON 2011, Lima, Perú
REFERENCIAS
• [1] W. Wong. Wanted: Roboticist. Electronic Design. 06.23.05 pp 40-46.
• [2] D. Manojkumar, P. Mathankumar, E. Saranya, S. Pavithradevi, “Mobile
Controlled Robot using DTMF Technology for Industrial Application”, International
Journal of Electronic Engineering Research, Volume 2 Number 3 (2010) pp. 349–355.
• [3] M, Arevalo. M. Pino, N, Sotomayor, “Control por voz de un robot explorador
tipo oruga,” en XIX Jornadas en Ingeniería Eléctrica y Electrónica.JIEE, Vol. 19, 2005,
pp. 69-73.
• [4] Detección de tonos DTMF usando el algoritmo de Goertzel, disponible en:
http://members.tripod.com
• [5] DTMF Tone Generation and Detection: An Implementation Using the
TMS320C54x, disponible en: http://focus.ti.com/lit/an/spra096a/spra096a.pdf
22 15/08/2012](https://image.slidesharecdn.com/plataformamovil-120815114822-phpapp01/85/Plataforma-movil-22-320.jpg)
![Universidad Nacional de Ingeniería | IEEE INTERCON 2011, Lima, Perú
REFERENCIAS
• [6] T. Nguyen, L Bushnell, “Feasibility Study of DTMF Communications for
Robots,” Dept of EE, University of Washington, disponible en:
http://www.ee.washington.edu/research/ncs/papers/DTMF_tr.pdf
• [7] Datasheet del circuito integrado MT8870, [Online] disponible en:
http://www.alldatasheet.com/datasheet-pdf/pdf/77085/MITEL/MT8870.html
• [8] T. Goedemé, M. Nuttin, T. Tuytelaars, L. Van Gool, Omnidirectional Vision
Based Topological Navigation, International Journal of Computer Vision 74(3), 219–
236, 2007
• [9] T. Goedemé, M. Nuttin, T. Tuytelaars, L. Van Gool, O. Millnert, A. Hüntenmann,
“Range determination for mobile robots using an omnidirectional camera,” Integrated
Computer-Aided Engineering 14 (2007) 63–72, IOS Press.
• [10] R. Raghavendra, “Mobile Phone Operated Land Rover” disponible en
http://raghueee.110mb.com/Documents/MobilePhone_Controlled_Robot_Complete
_Document.pdf
23 15/08/2012](https://image.slidesharecdn.com/plataformamovil-120815114822-phpapp01/85/Plataforma-movil-23-320.jpg)

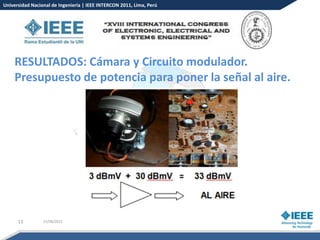
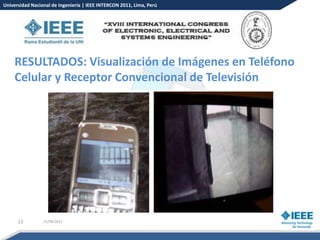
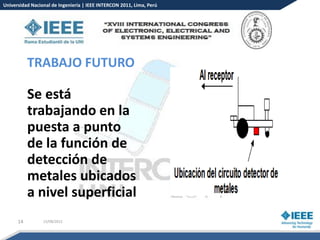
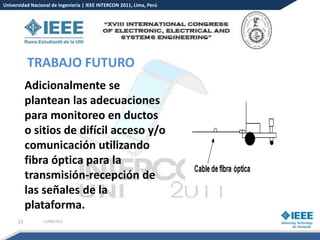
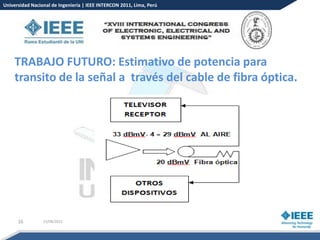
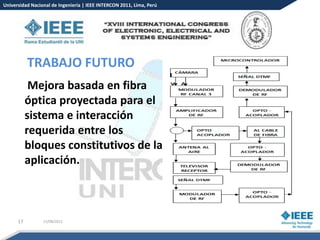
El documento describe un proyecto para desarrollar una plataforma móvil para monitoreo remoto con transmisión de video. La plataforma puede controlarse de forma remota a través de una red GSM usando tonos DTMF y permite visualizar imágenes de video en un teléfono celular o receptor de televisión. Los autores también discuten mejoras futuras como agregar detección de metales y usar fibra óptica para transmisión a larga distancia.