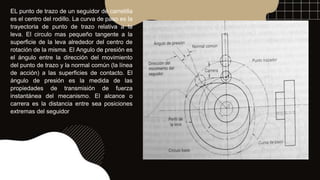
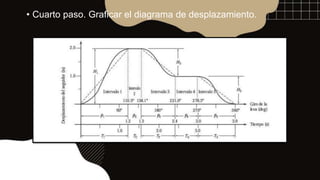
La leva levanta cajas de un transportador inferior a uno superior. Se requiere que la leva eleve 2 pulgadas en 1.2 segundos, se detenga 0.3 segundos, descienda 1 pulgada en 0.9 segundos, se detenga 0.6 segundos y descienda otra pulgada en 0.9 segundos. El ciclo completo dura 3.9 segundos, por lo que la velocidad requerida de la leva es de 15.38 rpm.
































![REFERENCIAS
• Myszka, D. H. (2012). Máquinas y mecanismos [Digital]. Pp.
226-227 (4.a ed.). PEARSON.](https://image.slidesharecdn.com/presentacin-221026053042-145cf149/85/PRESENTACION-pptx-38-320.jpg)


















































