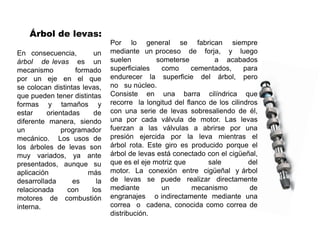
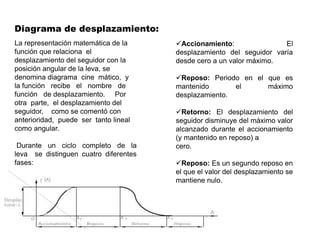
Este documento describe los diferentes tipos de levas y sus características. Explica las clasificaciones de levas como levas de disco, cilíndricas, de rodillo, de traslación, de ranura, glóbicas y de tambor. También describe los seguidores de levas, árboles de levas, características de las levas como el círculo base y diagrama de desplazamiento. Por último, explica el diseño analítico de levas con diferentes tipos de seguidores.