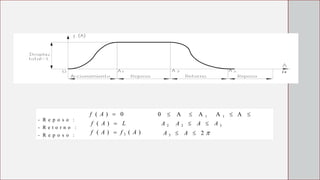
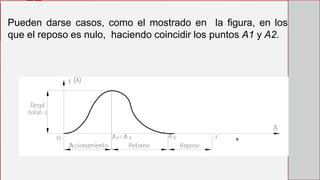
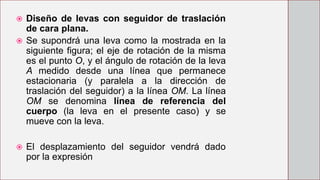
Este documento describe las levas, un mecanismo que transforma un movimiento lineal o giratorio en otro alternativo. Explica que las levas han existido desde la antigua Grecia y son dispositivos básicos en mecánica. Define una leva como un elemento que transmite su movimiento, normalmente rotatorio, a un seguidor que se mueve de acuerdo al contorno de la leva. Describe los diferentes tipos de seguidores y las cuatro fases del ciclo de una leva: accionamiento, reposo, retorno y otro periodo de reposo.