Descargado 138 veces

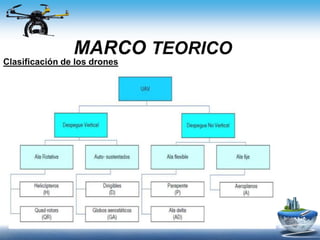

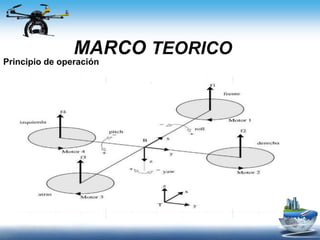
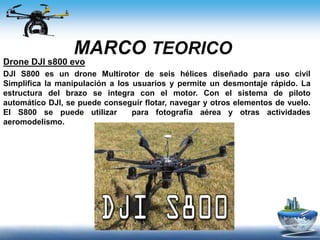


















Este documento presenta información sobre el uso de drones (UAV) para aplicaciones topográficas. Explica los componentes, especificaciones y uso del drone DJI S800 EVO. Detalla los pasos de planificación de vuelo, toma de fotos, procesamiento de imágenes y generación de modelos digitales. También analiza las ventajas como bajo costo y desventajas como limitaciones de batería para proyectos fotogramétricos con drones en comparación a métodos convencionales. Concluye que los proyectos con drones no difieren









































































