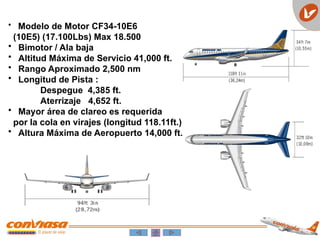
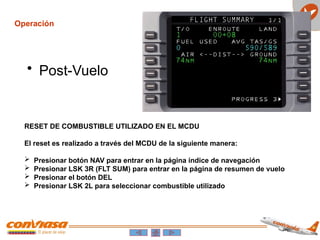
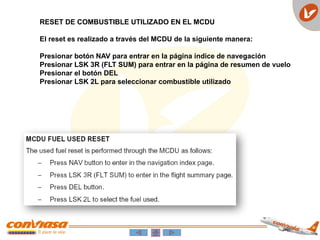
• Modelo deMotor CF34-10E6
(10E5) (17.100Lbs) Max 18.500
• Bimotor / Ala baja
• Altitud Máxima de Servicio 41,000 ft.
• Rango Aproximado 2,500 nm
• Longitud de Pista :
Despegue 4,385 ft.
Aterrizaje 4,652 ft.
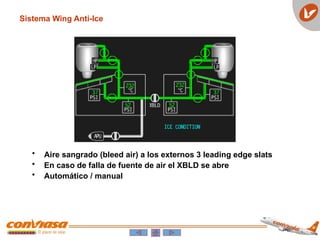
• Mayor área de clareo es requerida
por la cola en virajes (longitud 118.11ft.)
• Altura Máxima de Aeropuerto 14,000 ft.
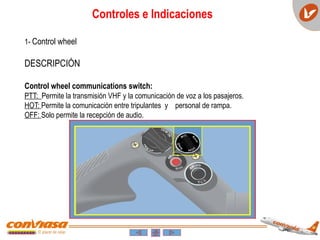
4.
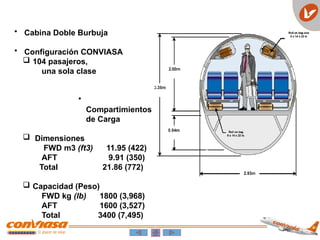
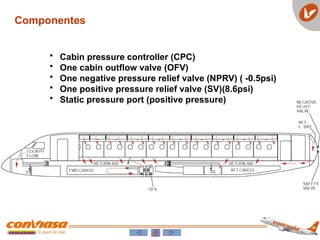
• Cabina DobleBurbuja
• Configuración CONVIASA
104 pasajeros,
una sola clase
•
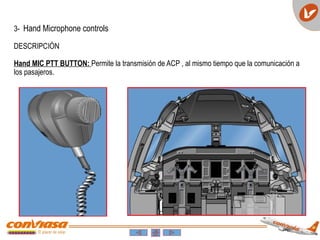
Compartimientos
de Carga
Dimensiones
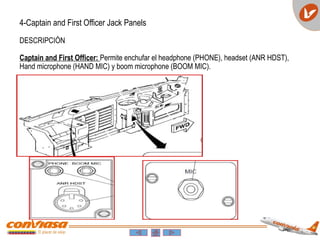
FWD m3 (ft3) 11.95 (422)
AFT 9.91 (350)
Total 21.86 (772)
Capacidad (Peso)
FWD kg (lb) 1800 (3,968)
AFT 1600 (3,527)
Total 3400 (7,495)
5.
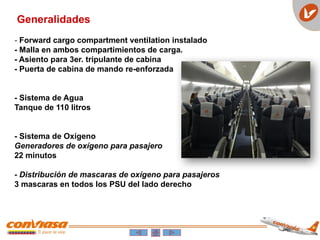
Generalidades
- Forward cargocompartment ventilation instalado
- Malla en ambos compartimientos de carga.
- Asiento para 3er. tripulante de cabina
- Puerta de cabina de mando re-enforzada
- Sistema de Agua
Tanque de 110 litros
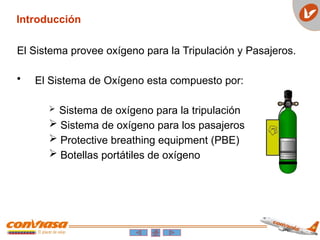
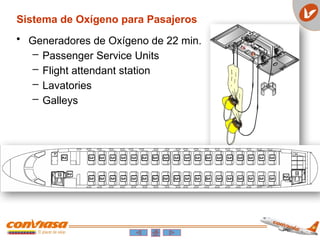
- Sistema de Oxígeno
Generadores de oxígeno para pasajero
22 minutos
- Distribución de mascaras de oxígeno para pasajeros
3 mascaras en todos los PSU del lado derecho
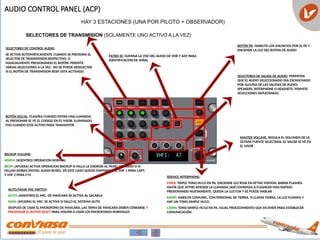
• Overhead Panel
•Glareshield Panel
• Center Panel
• Captain Panel
• First Officer Panel
• Captain Console
• First Officer Console
• Observer Console
• Control Pedestal
• Landing Gear Free Fall Lever
Compartment
Distribucion de la Cabina de Mando
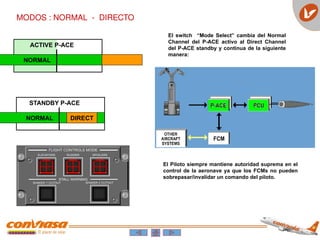
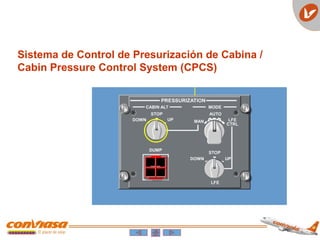
• El control de los sitemas de la aeronave es realizado via el overhead panel.
• Algunos botones en el overhead panel tienen trabas de protección y se debe tirar de ellos
para
poder rotarlos y poseen una indicación entre cada posición.
• Una posición estacionaria es indicada con un rectángulo.
• Una posición momentanea es indicada con un triángulo color
blanco (IDG, APU START, LFE CONTROL)
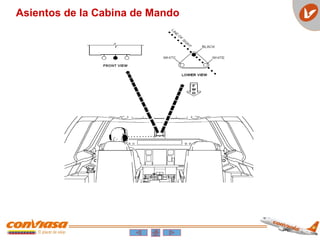
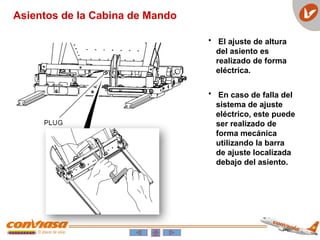
Asientos de laCabina de Mando
• El ajuste de altura
del asiento es
realizado de forma
eléctrica.
• En caso de falla del
sistema de ajuste
eléctrico, este puede
ser realizado de
forma mecánica
utilizando la barra
de ajuste localizada
debajo del asiento.
11.
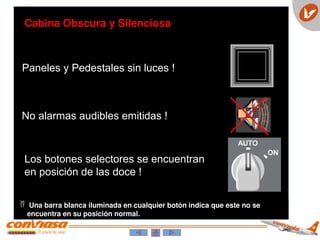
Cabina Obscura ySilenciosa
Paneles y Pedestales sin luces !
No alarmas audibles emitidas !
Los botones selectores se encuentran
en posición de las doce !
Una barra blanca iluminada en cualquier botón indica que este no se
encuentra en su posición normal.
12.
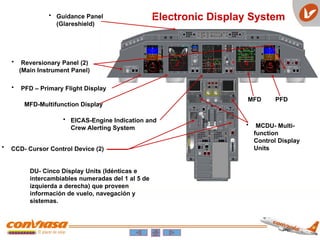
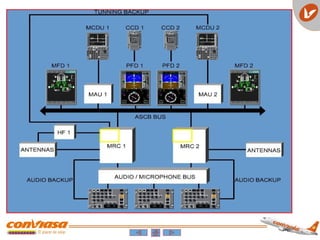
Electronic Display System
DU-Cinco Display Units (Idénticas e
intercambiables numeradas del 1 al 5 de
izquierda a derecha) que proveen
información de vuelo, navegación y
sistemas.
MFD PFD
1
1
1 3
2 4 5
• MCDU- Multi-
function
Control Display
Units
• Reversionary Panel (2)
(Main Instrument Panel)
• CCD- Cursor Control Device (2)
• Guidance Panel
(Glareshield)
• PFD – Primary Flight Display
MFD-Multifunction Display
• EICAS-Engine Indication and
Crew Alerting System
13.
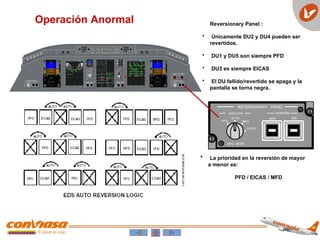
Operación Anormal ReversionaryPanel :
• Únicamente DU2 y DU4 pueden ser
revertidos.
• DU1 y DU5 son siempre PFD
• DU3 es siempre EICAS
• El DU fallido/revertido se apaga y la
pantalla se torna negra.
• La prioridad en la reversión de mayor
a menor es:
PFD / EICAS / MFD
14.
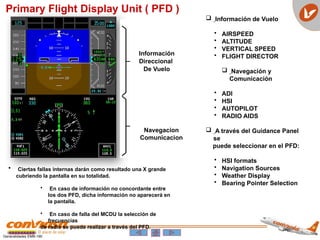
Primary Flight DisplayUnit ( PFD )
Información
Direccional
De Vuelo
Navegacion
Comunicacion
Información de Vuelo
• AIRSPEED
• ALTITUDE
• VERTICAL SPEED
• FLIGHT DIRECTOR
Navegación y
Comunicación
• ADI
• HSI
• AUTOPILOT
• RADIO AIDS
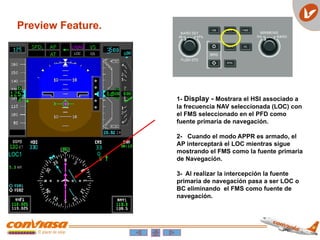
A través del Guidance Panel
se
puede seleccionar en el PFD:
• HSI formats
• Navigation Sources
• Weather Display
• Bearing Pointer Selection
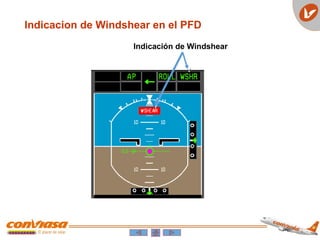
• Ciertas fallas internas darán como resultado una X grande
cubriendo la pantalla en su totalidad.
• En caso de información no concordante entre
los dos PFD, dicha información no aparecerá en
la pantalla.
• En caso de falla del MCDU la selección de
frecuencias
de radio se puede realizar a través del PFD.
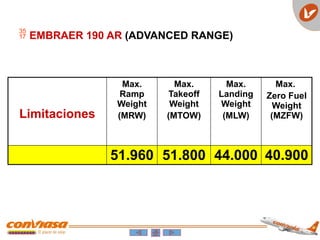
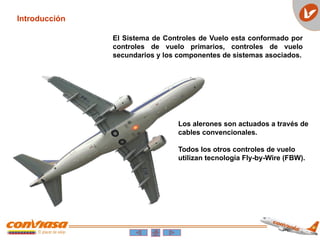
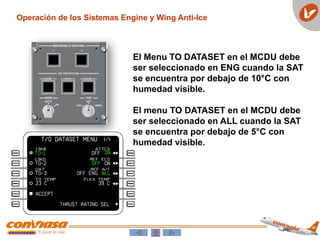
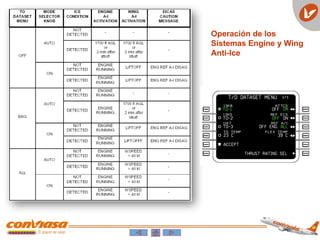
Generalidades EMB-190
15.
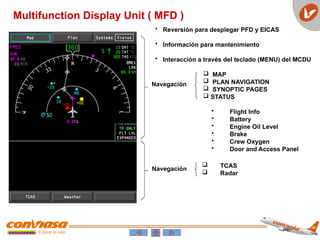
Multifunction Display Unit( MFD )
Navegación
Navegación
MAP
PLAN NAVIGATION
SYNOPTIC PAGES
STATUS
• Flight Info
• Battery
• Engine Oil Level
• Brake
• Crew Oxygen
• Door and Access Panel
• Reversión para desplegar PFD y EICAS
• Información para mantenimiento
• Interacción a través del teclado (MENU) del MCDU
TCAS
Radar
16.
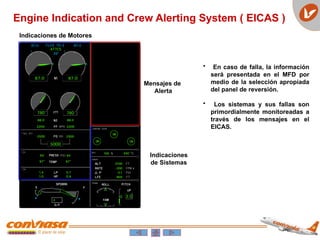
Engine Indication andCrew Alerting System ( EICAS )
Indicaciones de Motores
Mensajes de
Alerta
Indicaciones
de Sistemas
• En caso de falla, la información
será presentada en el MFD por
medio de la selección apropiada
del panel de reversión.
• Los sistemas y sus fallas son
primordialmente monitoreadas a
través de los mensajes en el
EICAS.
17.
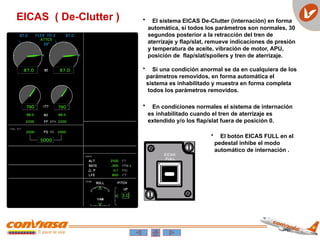
EICAS ( De-Clutter) • El sistema EICAS De-Clutter (internación) en forma
automática, si todos los parámetros son normales, 30
segundos posterior a la retracción del tren de
aterrizaje y flap/slat, remueve indicaciones de presión
y temperatura de aceite, vibración de motor, APU,
posición de flap/slat/spoilers y tren de aterrizaje.
• Si una condición anormal se da en cualquiera de los
parámetros removidos, en forma automática el
sistema es inhabilitado y muestra en forma completa
todos los parámetros removidos.
• El botón EICAS FULL en el
pedestal inhibe el modo
automático de internación .
• En condiciones normales el sistema de internación
es inhabilitado cuando el tren de aterrizaje es
extendido y/o los flap/slat fuera de posición 0.
18.
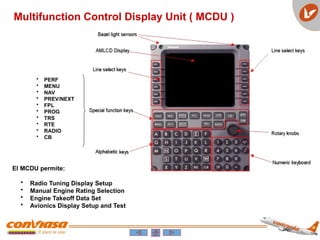
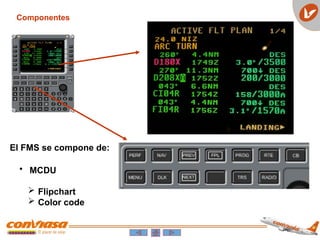
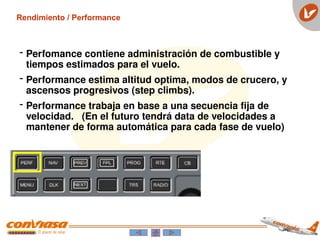
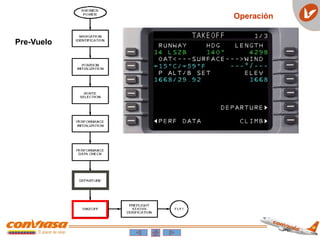
• PERF
• MENU
•NAV
• PREV/NEXT
• FPL
• PROG
• TRS
• RTE
• RADIO
• CB
El MCDU permite:
• Radio Tuning Display Setup
• Manual Engine Rating Selection
• Engine Takeoff Data Set
• Avionics Display Setup and Test
Multifunction Control Display Unit ( MCDU )
19.
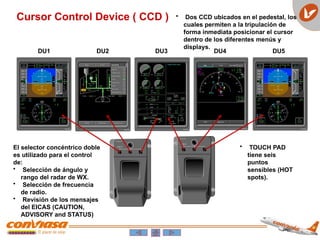
Cursor Control Device( CCD ) • Dos CCD ubicados en el pedestal, los
cuales permiten a la tripulación de
forma inmediata posicionar el cursor
dentro de los diferentes menús y
displays.
El selector concéntrico doble
es utilizado para el control
de:
• Selección de ángulo y
rango del radar de WX.
• Selección de frecuencia
de radio.
• Revisión de los mensajes
del EICAS (CAUTION,
ADVISORY and STATUS)
• TOUCH PAD
tiene seis
puntos
sensibles (HOT
spots).
DU1 DU2 DU3 DU4 DU5
20.
DU1 DU2 DU3DU4 DU5
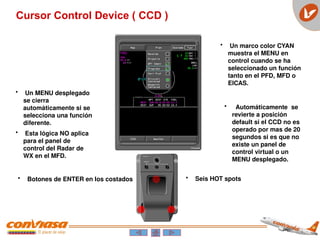
Cursor Control Device ( CCD )
• El botón central tiene
una forma diferente a
fin
de identificarlo fácilmente
en condiciones de baja
visibilidad y turbulencia.
21.
• Botones deENTER en los costados
• Un marco color CYAN
muestra el MENU en
control cuando se ha
seleccionado un función
tanto en el PFD, MFD o
EICAS.
• Un MENU desplegado
se cierra
automáticamente si se
selecciona una función
diferente.
• Esta lógica NO aplica
para el panel de
control del Radar de
WX en el MFD.
• Automáticamente se
revierte a posición
default si el CCD no es
operado por mas de 20
segundos si es que no
existe un panel de
control virtual o un
MENU desplegado.
• Seis HOT spots
Cursor Control Device ( CCD )
22.
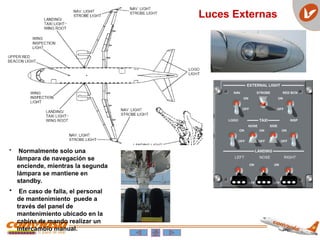
Luces Externas
• Normalmentesolo una
lámpara de navegación se
enciende, mientras la segunda
lámpara se mantiene en
standby.
• En caso de falla, el personal
de mantenimiento puede a
través del panel de
mantenimiento ubicado en la
cabina de mando realizar un
intercambio manual.
E C OE m e r g e n c y P o w e r S u p p l y U n i t
P N 3 4 0 0 - 2 2
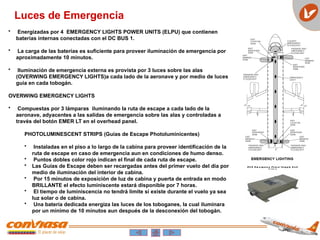
• Energizadas por 4 EMERGENCY LIGHTS POWER UNITS (ELPU) que contienen
baterías internas conectadas con el DC BUS 1.
• La carga de las baterías es suficiente para proveer iluminación de emergencia por
aproximadamente 10 minutos.
• Iluminación de emergencia externa es provista por 3 luces sobre las alas
(OVERWING EMERGENCY LIGHTS)a cada lado de la aeronave y por medio de luces
guia en cada tobogán.
OVERWING EMERGENCY LIGHTS
• Compuestas por 3 lámparas iluminando la ruta de escape a cada lado de la
aeronave, adyacentes a las salidas de emergencia sobre las alas y controladas a
través del botón EMER LT en el overhead panel.
PHOTOLUMINESCENT STRIPS (Guías de Escape Photoluminicentes)
• Instaladas en el piso a lo largo de la cabina para proveer identificación de la
ruta de escape en caso de emergencia aun en condiciones de humo denso.
• Puntos dobles color rojo indican el final de cada ruta de escape.
• Las Guías de Escape deben ser recargadas antes del primer vuelo del día por
medio de iluminación del interior de cabina.
• Por 15 minutos de exposición de luz de cabina y puerta de entrada en modo
BRILLANTE el efecto luminiscente estará disponible por 7 horas.
• El tiempo de luminiscencia no tendrá limite si existe durante el vuelo ya sea
luz solar o de cabina.
• Una batería dedicada energiza las luces de los toboganes, la cual iluminara
por un mínimo de 10 minutos aun después de la desconexión del tobogán.
Luces de Emergencia
25.
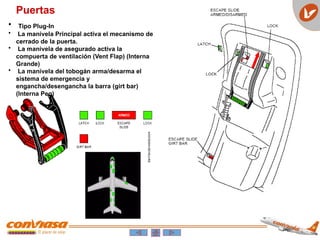
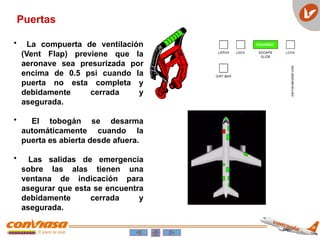
Puertas
• Tipo Plug-In
•La manivela Principal activa el mecanismo de
cerrado de la puerta.
• La manivela de asegurado activa la
compuerta de ventilación (Vent Flap) (Interna
Grande)
• La manivela del tobogán arma/desarma el
sistema de emergencia y
engancha/desengancha la barra (girt bar)
(Interna Peq)
26.
• La compuertade ventilación
(Vent Flap) previene que la
aeronave sea presurizada por
encima de 0.5 psi cuando la
puerta no esta completa y
debidamente cerrada y
asegurada.
• El tobogán se desarma
automáticamente cuando la
puerta es abierta desde afuera.
• Las salidas de emergencia
sobre las alas tienen una
ventana de indicación para
asegurar que esta se encuentra
debidamente cerrada y
asegurada.
Puertas
27.
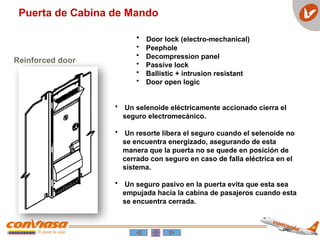
Puerta de Cabinade Mando
Reinforced door
• Door lock (electro-mechanical)
• Peephole
• Decompression panel
• Passive lock
• Ballistic + intrusion resistant
• Door open logic
• Un selenoide eléctricamente accionado cierra el
seguro electromecánico.
• Un resorte libera el seguro cuando el selenoide no
se encuentra energizado, asegurando de esta
manera que la puerta no se quede en posición de
cerrado con seguro en caso de falla eléctrica en el
sistema.
• Un seguro pasivo en la puerta evita que esta sea
empujada hacia la cabina de pasajeros cuando esta
se encuentra cerrada.
1. EMB 190Avionic System
2. Visual Warning
3. Aural Warning
4. Take off config check
1. EGPWS
2. Windshear Detection
3. TCAS
4. PFD Indications
Warning System A Warning System B
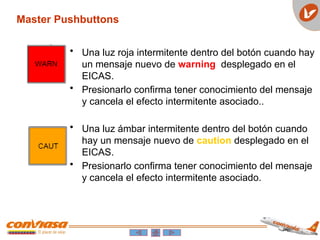
• Una luzroja intermitente dentro del botón cuando hay
un mensaje nuevo de warning desplegado en el
EICAS.
• Presionarlo confirma tener conocimiento del mensaje
y cancela el efecto intermitente asociado..
• Una luz ámbar intermitente dentro del botón cuando
hay un mensaje nuevo de caution desplegado en el
EICAS.
• Presionarlo confirma tener conocimiento del mensaje
y cancela el efecto intermitente asociado.
Master Pushbuttons
35.
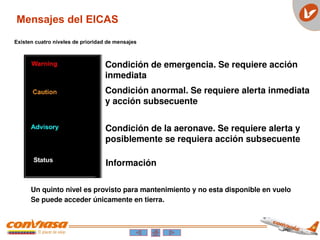
Condición de emergencia.Se requiere acción
inmediata
Condición anormal. Se requiere alerta inmediata
y acción subsecuente
Condición de la aeronave. Se requiere alerta y
posiblemente se requiera acción subsecuente
Información
Un quinto nivel es provisto para mantenimiento y no esta disponible en vuelo
Se puede acceder únicamente en tierra.
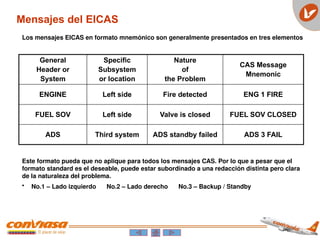
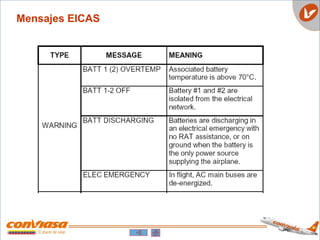
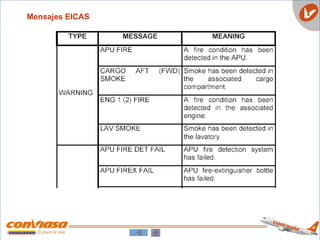
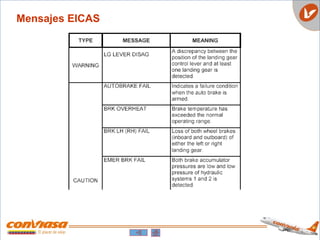
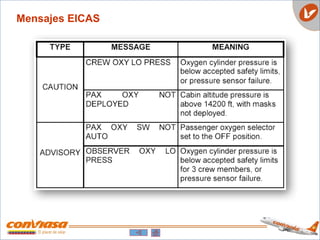
Mensajes del EICAS
Existen cuatro niveles de prioridad de mensajes
36.
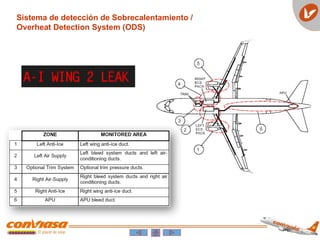
General
Header or
System
Specific
Subsystem
or location
Nature
of
theProblem
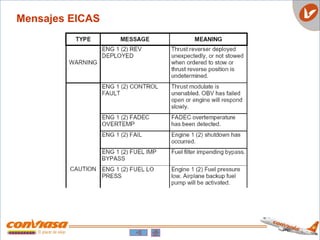
CAS Message
Mnemonic
ENGINE Left side Fire detected ENG 1 FIRE
FUEL SOV Left side Valve is closed FUEL SOV CLOSED
ADS Third system ADS standby failed ADS 3 FAIL
Los mensajes EICAS en formato mnemónico son generalmente presentados en tres elementos
Este formato pueda que no aplique para todos los mensajes CAS. Por lo que a pesar que el
formato standard es el deseable, puede estar subordinado a una redacción distinta pero clara
de la naturaleza del problema.
• No.1 – Lado izquierdo No.2 – Lado derecho No.3 – Backup / Standby
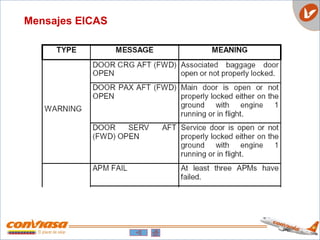
Mensajes del EICAS
37.
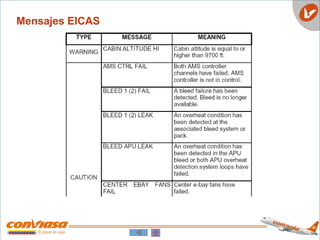
DOOR PAX AFTOPEN
CABIN ALTITUDE HI
BATT 1 OVERTEMP
ENG 1 REV DEPLOYED
ENG 2 FAIL
ENG 1 OIL LOW LEVEL
ENG 1 OIL LOW PRESS
IDG 1 OIL
TRU 1 FAIL
BATT 1 OFF
APU FIREX FAIL
FLAP FAIL
RUDDER FAULT
ELEVATOR LH FAIL
SPOILER FAULT
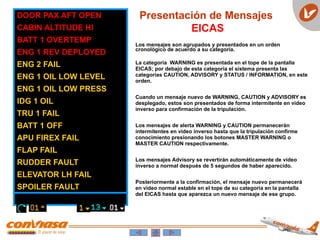
Los mensajes son agrupados y presentados en un orden
cronológico de acuerdo a su categoría.
La categoría WARNING es presentada en el tope de la pantalla
EICAS; por debajo de esta categoría el sistema presenta las
categorías CAUTION, ADVISORY y STATUS / INFORMATION, en este
orden.
Cuando un mensaje nuevo de WARNING, CAUTION y ADVISORY es
desplegado, estos son presentados de forma intermitente en video
inverso para confirmación de la tripulación.
Los mensajes de alerta WARNING y CAUTION permanecerán
intermitentes en video inverso hasta que la tripulación confirme
conocimiento presionando los botones MASTER WARNING o
MASTER CAUTION respectivamente.
Los mensajes Advisory se revertirán automáticamente de video
inverso a normal después de 5 segundos de haber aparecido.
Posteriormente a la confirmación, el mensaje nuevo permanecerá
en video normal estable en el tope de su categoría en la pantalla
del EICAS hasta que aparezca un nuevo mensaje de ese grupo.
Presentación de Mensajes
EICAS
38.
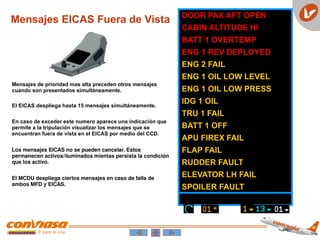
DOOR PAX AFTOPEN
CABIN ALTITUDE HI
BATT 1 OVERTEMP
ENG 1 REV DEPLOYED
ENG 2 FAIL
ENG 1 OIL LOW LEVEL
ENG 1 OIL LOW PRESS
IDG 1 OIL
TRU 1 FAIL
BATT 1 OFF
APU FIREX FAIL
FLAP FAIL
RUDDER FAULT
ELEVATOR LH FAIL
SPOILER FAULT
Mensajes de prioridad mas alta preceden otros mensajes
cuando son presentados simultáneamente.
El EICAS despliega hasta 15 mensajes simultáneamente.
En caso de exceder este numero aparece una indicación que
permite a la tripulación visualizar los mensajes que se
encuentran fuera de vista en el EICAS por medio del CCD.
Los mensajes EICAS no se pueden cancelar. Estos
permanecen activos/iluminados mientas persista la condición
que los activo.
El MCDU despliega ciertos mensajes en caso de falla de
ambos MFD y EICAS.
Mensajes EICAS Fuera de Vista
39.
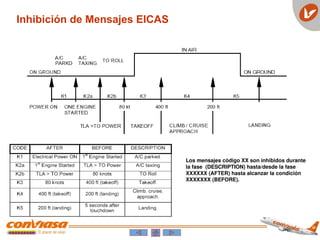
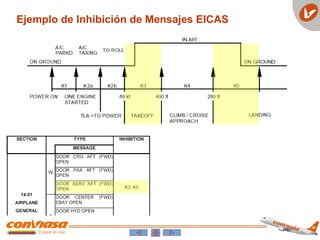
Los mensajes códigoXX son inhibidos durante
la fase (DESCRIPTION) hasta/desde la fase
XXXXXX (AFTER) hasta alcanzar la condición
XXXXXXX (BEFORE).
Inhibición de Mensajes EICAS
• Las alertasaudibles suenan en secuencia y nunca se truncan entre si, y se cancelan automáicamente
cuando la condición de alerta desaparece, o cuando son canceladas por el piloto de forma manual.
• En caso de múltiples alertas, la alerta con prioridad mas alta suena primero.
• Las alertas audibles son tonos, campanas, pitos, clicks, beeps y mensajes de voz.
• Hay cuatro niveles de prioridad de alertas audibles. Ellas son de mayor a menor prioridad:
EMERGENCY (Nivel 3): Corresponde a una situación que requiere la atención inmediata del piloto. El
anunciador MASTER WARNING se repite con tres segundos de intervalo entre
alertas hasta que el botón MASTER WARNING sea presionado.
ABNORMAL (Nivel 2): Corresponde a una situación anormal, tal como mal funcionamiento de un sistema
o falla que no tiene impacto inmediato en la seguridad. Cuando ocurre una falla anormal
un tono MASTER CAUTION es producido cada cinco segundos hasta que el botón de
MASTER CAUTION SEA PRESIONADO.
ADVISORY (Nivel 1): Corresponde al reconocimiento de una situación como mal funcionamiento de un
sistema o fallas encaminadas a la perdida de redundancia o degradación de un sistema.
Para las alertas ADVISORY un sonido/señal sencilla de alerta es presentada la cual se
cancela automáticamente.
INFORMATION (Nivel 0): Corresponde a una situación informativa. Para las alertas de información, un
sonido/señal sencilla de alerta es presentada la cual se cancela automáticamente.
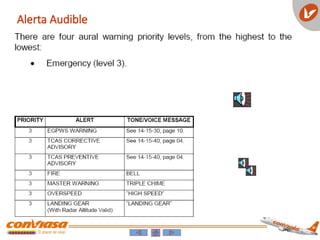
Alerta Audible
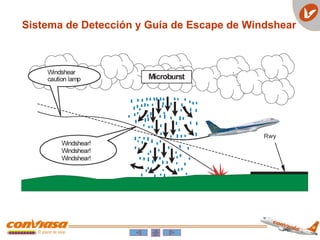
• Los mensajesde voz son generados cuando existe una situación potencialmente
peligrosa, como sea determinado por el EGPWS, TCAS, y el sistema de detección
de windshear.
• Algunos mensajes de voz pueden ser cancelados, pero existen otros que solo
pueden ser cancelados cuando desaparece la causa que les activó.
• Cuando se presenta una condición de alerta de Windshear, TCAS o EGPWS, esta es
considerada especial, por lo que en este caso no se presenta ningún otro mensaje
de voz a fin de que la tripulación pueda claramente escuchar la informacion del
mensaje.
• La condición de STALL es el único mensaje de alerta que toma precedencia sobre
las alertas de Windshear, EGPWS y TCAS.
Mensajes de Voz
• Evitar accidentescausados por CFIT
• Utiliza base de datos e información de
terreno, posición y altitud de la aeronave.
• Provee mensajes audibles e indicaciones
en el PFD.
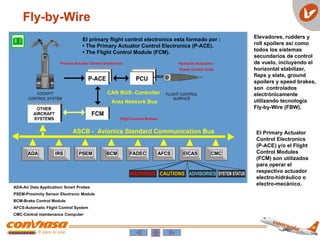
Introducción
47.
• Air DataSystem
• Flight Management System
• Global Positioning System
• Inertial Reference System
• Radar Altimeter
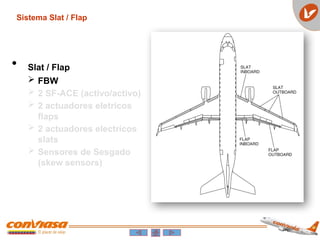
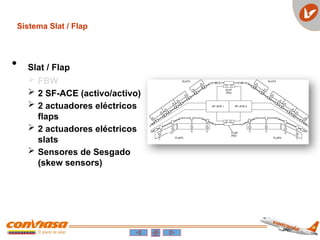
• Slats y Flaps
Principales Proveedores de Informacion
48.
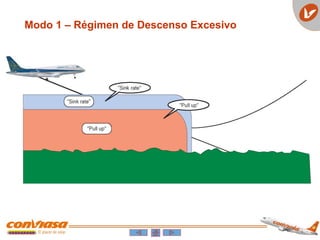
• Régimen deDescenso Excesivo
(Excessive Decent Rate)
• Acercamiento Excesivo al Terreno
(Excessive Closure rate to Terrain)
• Perdida de Altitud Posterior al Despegue
(Altitude loss after takeoff)
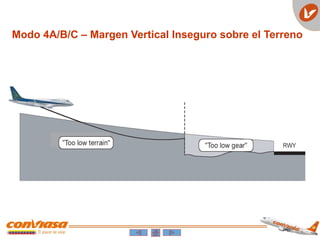
• Margen Vertical Inseguro sobre el Terreno
(Unsafe terrain clearance)
• Descenso por Debajo de la Senda de Planeo
(Decent below glideslope)
Modos del EGPWS
49.
• Avisos
(Callouts)
• Windshear
•Angulo de Inclinación Lateral Excesivo
(Excessive bank angle)
• Alertas de Terreno y Obstáculos
(Terrain and obstacles alerts)
• Niveles de Margen Vertical sobre el Terreno
(Terrain clearance floor)
Modos del EGPWS
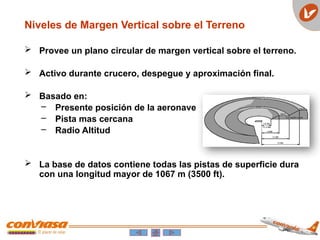
Provee unplano circular de margen vertical sobre el terreno.
Activo durante crucero, despegue y aproximación final.
Basado en:
– Presente posición de la aeronave
– Pista mas cercana
– Radio Altitud
La base de datos contiene todas las pistas de superficie dura
con una longitud mayor de 1067 m (3500 ft).
Niveles de Margen Vertical sobre el Terreno
57.
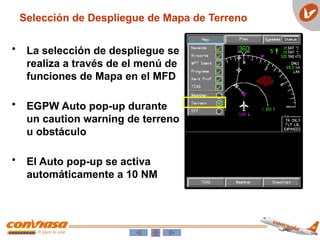
• La selecciónde despliegue se
realiza a través de el menú de
funciones de Mapa en el MFD
• EGPW Auto pop-up durante
un caution warning de terreno
u obstáculo
• El Auto pop-up se activa
automáticamente a 10 NM
Selección de Despliegue de Mapa de Terreno
58.
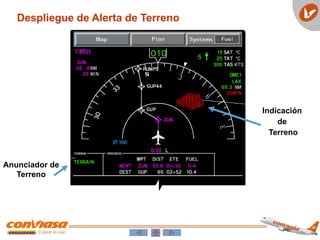
30 segundos paraIMPACTAR
40-60 segundos para IMPACTAR
Vista hacia adelante por terreno y obstáculos
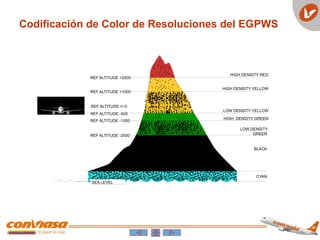
CYAN
BLACK
LOW DENSITY
GREEN
HIGH DENSITYGREEN
HIGH DENSITY YELLOW
HIGH DENSITY RED
REF ALTITUDE +2000
REF ALTITUDE +1000
REF ALTITUDE -500
REF ALTITUDE -1000
REF ALTITUDE -2000
LOW DENSITY YELLOW
REF ALTITUDE +/-0
SEA LEVEL
Codificación de Color de Resoluciones del EGPWS
61.
Pull Up /Ground Prox Annunciator
Indicación del EGPWS en el PFD
62.
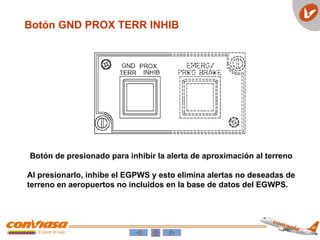
Botón GND PROXTERR INHIB
Botón de presionado para inhibir la alerta de aproximación al terreno
Al presionarlo, inhibe el EGPWS y esto elimina alertas no deseadas de
terreno en aeropuertos no incluidos en la base de datos del EGWPS.
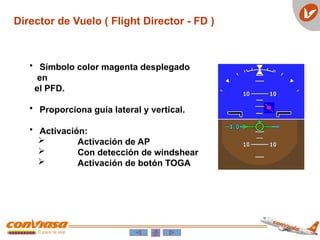
Modo de Guíade Escape de Windshear
La guía de escape de windshear se activa cuando se cumplen
cualquiera de las siguientes condiciones:
Cuando una condición de Windshear Caution o Windshear
Warning es detectada y el botón Takeoff and Go-around
(TO/GA) en las palancas de potencia es presionado.
Una condición de Windshear Warning es detectada y la(s)
palancas de potencia son llevadas a la posición de TO/GA.
De forma automática cuando una condición de Windshear
Warning es detectada y el Modo de Director de Vuelo (Flight
Director) del AFCS (Automatic Flight Control System) se
encuentra en TO o GA.
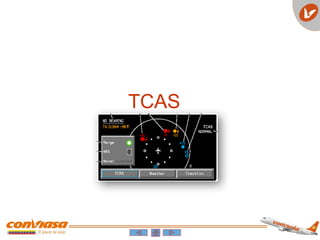
• Detecta lasaeronaves en las proximidades y despliega
símbolos.
• Proporciona altitud relativa o absoluta y movimiento
vertical.
• Monitorea peligros de potenciales colisiones.
• Alerta a la Tripulación de Vuelo.
Traffic Alert And Collision Avoidance System (TCAS)
68.
Selección de TCAS
enel Menú de Map
Indicación de Resolution Advisory (RA) < Indicación de Traffic Advisory (TA)
Trafico Próximo
Otro Trafico
Modo de TCAS
Anunciadores del TCAS en el MFD
69.
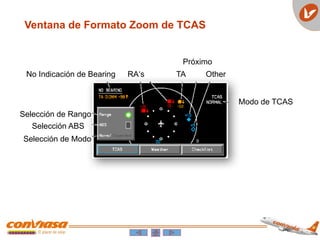
No Indicación deBearing RA‘s TA
Próximo
Other
Modo de TCAS
Selección de Modo
Selección ABS
Selección de Rango
Ventana de Formato Zoom de TCAS
• El Sistemade protección de Stall proporciona alerta al piloto
cuando la velocidad de la aeronave se esta aproximando a la
velocidad de stall.
– El AFCS comanda el stick shaker (Auto Flight Control
System)
– FCM comanda limitación de AOA (Flight Control Module)
– Indicaciones de Low Speed Awareness y PLI (Pitch Limit
Indicator) en el PFD.
– Botones de eliminación del Shaker se encuentran ubicados
en el Pedestal central.
Protección de Stall
73.
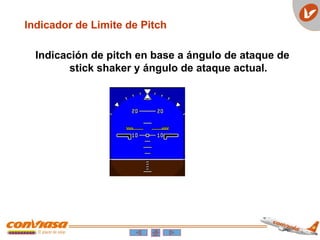
Indicación de pitchen base a ángulo de ataque de
stick shaker y ángulo de ataque actual.
Indicador de Limite de Pitch
74.
Indica aproximación ala velocidad de stall.
• VERDE: desde 1.2 de Vstall hacia abajo hasta
1.13 de Vstall.
• AMBAR: Desde 1.13 de Vstall hacia abajo hasta
Vshaker.
• ROJO: En, o por debajo de Vshaker.
Cinta de Alerta de Velocidad Baja
Objetivos
• Descripción delSistema Eléctrico.
• Identificar la red AC y DC, y las fuentes de energía
para cada una.
• Describir la prioridad de las fuentes y la lógica de
distribución.
• Identificación de los controles e indicaciones.
77.
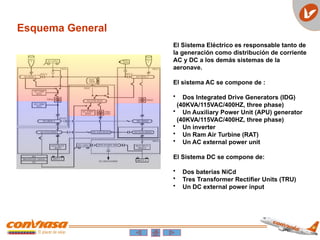
Esquema General
El SistemaEléctrico es responsable tanto de
la generación como distribución de corriente
AC y DC a los demás sistemas de la
aeronave.
El sistema AC se compone de :
• Dos Integrated Drive Generators (IDG)
(40KVA/115VAC/400HZ, three phase)
• Un Auxiliary Power Unit (APU) generator
(40KVA/115VAC/400HZ, three phase)
• Un inverter
• Un Ram Air Turbine (RAT)
• Un AC external power unit
El Sistema DC se compone de:
• Dos baterías NiCd
• Tres Transformer Rectifier Units (TRU)
• Un DC external power input
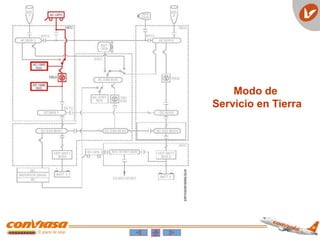
78.
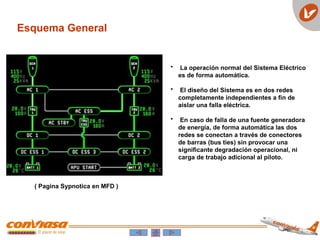
Esquema General
• Laoperación normal del Sistema Eléctrico
es de forma automática.
• El diseño del Sistema es en dos redes
completamente independientes a fin de
aislar una falla eléctrica.
• En caso de falla de una fuente generadora
de energía, de forma automática las dos
redes se conectan a través de conectores
de barras (bus ties) sin provocar una
significante degradación operacional, ni
carga de trabajo adicional al piloto.
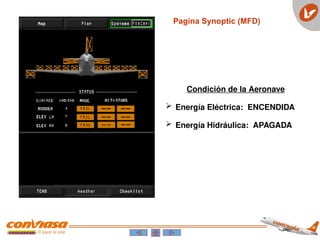
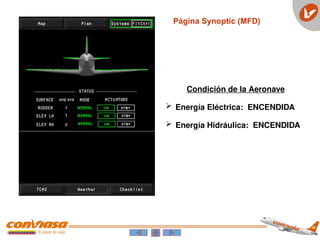
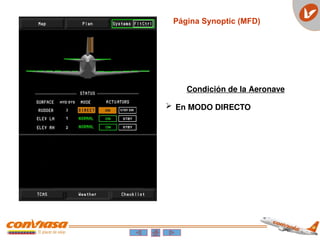
( Pagina Sypnotica en MFD )
79.
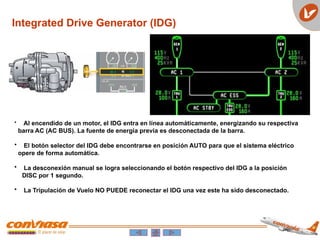
Integrated Drive Generator(IDG)
• Al encendido de un motor, el IDG entra en línea automáticamente, energizando su respectiva
barra AC (AC BUS). La fuente de energía previa es desconectada de la barra.
• El botón selector del IDG debe encontrarse en posición AUTO para que el sistema eléctrico
opere de forma automática.
• La desconexión manual se logra seleccionando el botón respectivo del IDG a la posición
DISC por 1 segundo.
• La Tripulación de Vuelo NO PUEDE reconectar el IDG una vez este ha sido desconectado.
80.
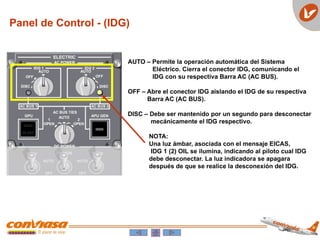
Panel de Control- (IDG)
AUTO – Permite la operación automática del Sistema
Eléctrico. Cierra el conector IDG, comunicando el
IDG con su respectiva Barra AC (AC BUS).
OFF – Abre el conector IDG aislando el IDG de su respectiva
Barra AC (AC BUS).
DISC – Debe ser mantenido por un segundo para desconectar
mecánicamente el IDG respectivo.
NOTA:
Una luz ámbar, asociada con el mensaje EICAS,
IDG 1 (2) OIL se ilumina, indicando al piloto cual IDG
debe desconectar. La luz indicadora se apagara
después de que se realice la desconexión del IDG.
81.
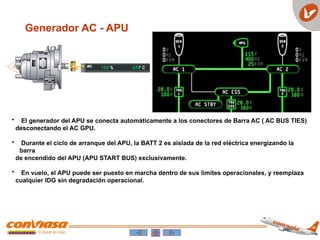
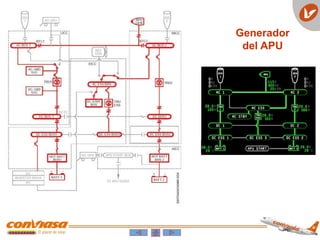
Generador AC -APU
• El generador del APU se conecta automáticamente a los conectores de Barra AC ( AC BUS TIES)
desconectando el AC GPU.
• Durante el ciclo de arranque del APU, la BATT 2 es aislada de la red eléctrica energizando la
barra
de encendido del APU (APU START BUS) exclusivamente.
• En vuelo, el APU puede ser puesto en marcha dentro de sus limites operacionales, y reemplaza
cualquier IDG sin degradación operacional.
82.
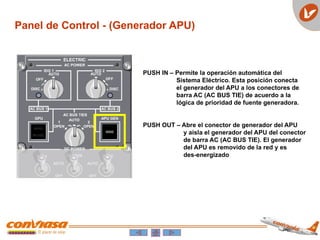
Panel de Control- (Generador APU)
PUSH IN – Permite la operación automática del
Sistema Eléctrico. Esta posición conecta
el generador del APU a los conectores de
barra AC (AC BUS TIE) de acuerdo a la
lógica de prioridad de fuente generadora.
PUSH OUT – Abre el conector de generador del APU
y aísla el generador del APU del conector
de barra AC (AC BUS TIE). El generador
del APU es removido de la red y es
des-energizado
83.
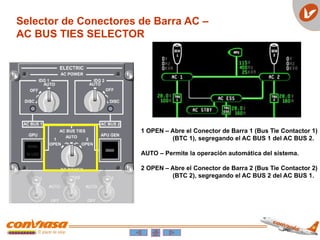
Selector de Conectoresde Barra AC –
AC BUS TIES SELECTOR
1 OPEN – Abre el Conector de Barra 1 (Bus Tie Contactor 1)
(BTC 1), segregando el AC BUS 1 del AC BUS 2.
AUTO – Permite la operación automática del sistema.
2 OPEN – Abre el Conector de Barra 2 (Bus Tie Contactor 2)
(BTC 2), segregando el AC BUS 2 del AC BUS 1.
84.
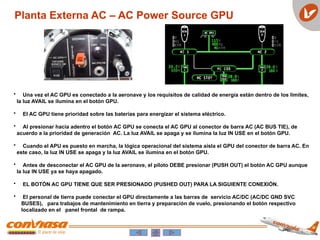
Planta Externa AC– AC Power Source GPU
• Una vez el AC GPU es conectado a la aeronave y los requisitos de calidad de energía están dentro de los limites,
la luz AVAIL se ilumina en el botón GPU.
• El AC GPU tiene prioridad sobre las baterías para energizar el sistema eléctrico.
• Al presionar hacia adentro el botón AC GPU se conecta el AC GPU al conector de barra AC (AC BUS TIE), de
acuerdo a la prioridad de generación AC. La luz AVAIL se apaga y se ilumina la luz IN USE en el botón GPU.
• Cuando el APU es puesto en marcha, la lógica operacional del sistema aísla el GPU del conector de barra AC. En
este caso, la luz IN USE se apaga y la luz AVAIL se ilumina en el botón GPU.
• Antes de desconectar el AC GPU de la aeronave, el piloto DEBE presionar (PUSH OUT) el botón AC GPU aunque
la luz IN USE ya se haya apagado.
• EL BOTÓN AC GPU TIENE QUE SER PRESIONADO (PUSHED OUT) PARA LA SIGUIENTE CONEXIÓN.
• El personal de tierra puede conectar el GPU directamente a las barras de servicio AC/DC (AC/DC GND SVC
BUSES), para trabajos de mantenimiento en tierra y preparación de vuelo, presionando el botón respectivo
localizado en el panel frontal de rampa.
85.
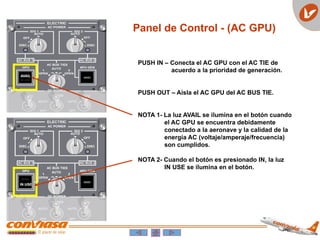
Panel de Control- (AC GPU)
PUSH IN – Conecta el AC GPU con el AC TIE de
acuerdo a la prioridad de generación.
PUSH OUT – Aísla el AC GPU del AC BUS TIE.
NOTA 1- La luz AVAIL se ilumina en el botón cuando
el AC GPU se encuentra debidamente
conectado a la aeronave y la calidad de la
energía AC (voltaje/amperaje/frecuencia)
son cumplidos.
NOTA 2- Cuando el botón es presionado IN, la luz
IN USE se ilumina en el botón.
AVAIL
IN USE
86.
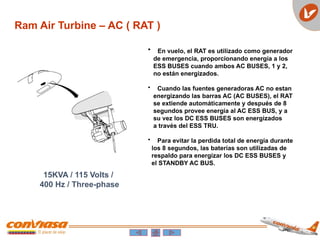
Ram Air Turbine– AC ( RAT )
15KVA / 115 Volts /
400 Hz / Three-phase
• En vuelo, el RAT es utilizado como generador
de emergencia, proporcionando energía a los
ESS BUSES cuando ambos AC BUSES, 1 y 2,
no están energizados.
• Cuando las fuentes generadoras AC no estan
energizando las barras AC (AC BUSES), el RAT
se extiende automáticamente y después de 8
segundos provee energía al AC ESS BUS, y a
su vez los DC ESS BUSES son energizados
a través del ESS TRU.
• Para evitar la perdida total de energía durante
los 8 segundos, las baterías son utilizadas de
respaldo para energizar los DC ESS BUSES y
el STANDBY AC BUS.
87.
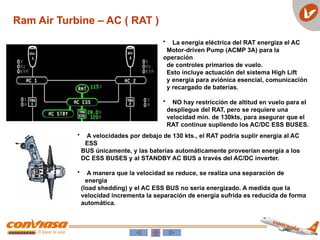
Ram Air Turbine– AC ( RAT )
• La energía eléctrica del RAT energiza el AC
Motor-driven Pump (ACMP 3A) para la
operación
de controles primarios de vuelo.
Esto incluye actuación del sistema High Lift
y energía para aviónica esencial, comunicación
y recargado de baterías.
• NO hay restricción de altitud en vuelo para el
despliegue del RAT, pero se requiere una
velocidad min. de 130kts, para asegurar que el
RAT continue supliendo los AC/DC ESS BUSES.
• A velocidades por debajo de 130 kts., el RAT podría suplir energía al AC
ESS
BUS únicamente, y las baterías automáticamente proveerían energía a los
DC ESS BUSES y al STANDBY AC BUS a través del AC/DC inverter.
• A manera que la velocidad se reduce, se realiza una separación de
energía
(load shedding) y el AC ESS BUS no seria energizado. A medida que la
velocidad incrementa la separación de energía sufrida es reducida de forma
automática.
88.
Ram Air Turbine– AC ( RAT )
Despliega
Manualmente el
Ram Air Turbine
89.
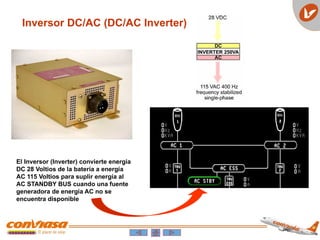
El Inversor (Inverter)convierte energía
DC 28 Voltios de la batería a energía
AC 115 Voltios para suplir energía al
AC STANDBY BUS cuando una fuente
generadora de energía AC no se
encuentra disponible
Inversor DC/AC (DC/AC Inverter)
90.
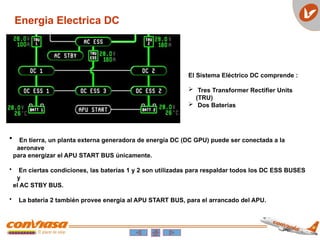
Energia Electrica DC
ElSistema Eléctrico DC comprende :
Tres Transformer Rectifier Units
(TRU)
Dos Baterías
• En tierra, un planta externa generadora de energía DC (DC GPU) puede ser conectada a la
aeronave
para energizar el APU START BUS únicamente.
• En ciertas condiciones, las baterías 1 y 2 son utilizadas para respaldar todos los DC ESS BUSES
y
el AC STBY BUS.
• La batería 2 también provee energía al APU START BUS, para el arrancado del APU.
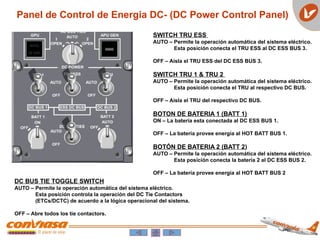
91.
SWITCH TRU ESS
AUTO– Permite la operación automática del sistema eléctrico.
Esta posición conecta el TRU ESS al DC ESS BUS 3.
OFF – Aísla el TRU ESS del DC ESS BUS 3.
SWITCH TRU 1 & TRU 2
AUTO – Permite la operación automática del sistema eléctrico.
Esta posición conecta el TRU al respectivo DC BUS.
OFF – Aísla el TRU del respectivo DC BUS.
BOTON DE BATERIA 1 (BATT 1)
ON – La batería esta conectada al DC ESS BUS 1.
OFF – La batería provee energía al HOT BATT BUS 1.
BOTÓN DE BATERIA 2 (BATT 2)
AUTO – Permite la operación automática del sistema eléctrico.
Esta posición conecta la batería 2 al DC ESS BUS 2.
OFF – La batería provee energía al HOT BATT BUS 2
DC BUS TIE TOGGLE SWITCH
AUTO – Permite la operación automática del sistema eléctrico.
Esta posición controla la operación del DC Tie Contactors
(ETCs/DCTC) de acuerdo a la lógica operacional del sistema.
OFF – Abre todos los tie contactors.
Panel de Control de Energia DC- (DC Power Control Panel)
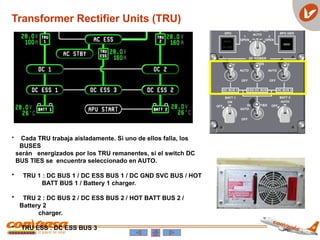
92.
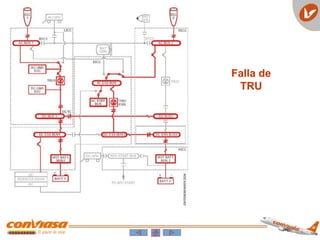
Transformer Rectifier Units(TRU)
• Cada TRU trabaja aisladamente. Si uno de ellos falla, los
BUSES
serán energizados por los TRU remanentes, si el switch DC
BUS TIES se encuentra seleccionado en AUTO.
• TRU 1 : DC BUS 1 / DC ESS BUS 1 / DC GND SVC BUS / HOT
BATT BUS 1 / Battery 1 charger.
• TRU 2 : DC BUS 2 / DC ESS BUS 2 / HOT BATT BUS 2 /
Battery 2
charger.
• TRU ESS : DC ESS BUS 3
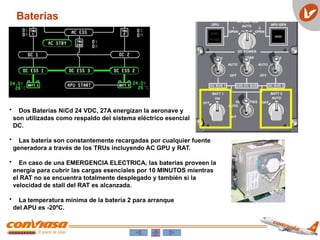
93.
Baterias
• Dos BateríasNiCd 24 VDC, 27A energizan la aeronave y
son utilizadas como respaldo del sistema eléctrico esencial
DC.
• Las batería son constantemente recargadas por cualquier fuente
generadora a través de los TRUs incluyendo AC GPU y RAT.
• En caso de una EMERGENCIA ELECTRICA, las baterías proveen la
energía para cubrir las cargas esenciales por 10 MINUTOS mientras
el RAT no se encuentra totalmente desplegado y también si la
velocidad de stall del RAT es alcanzada.
• La temperatura mínima de la batería 2 para arranque
del APU es -20ºC.
94.
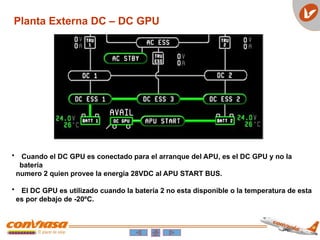
Planta Externa DC– DC GPU
• Cuando el DC GPU es conectado para el arranque del APU, es el DC GPU y no la
batería
numero 2 quien provee la energía 28VDC al APU START BUS.
• El DC GPU es utilizado cuando la batería 2 no esta disponible o la temperatura de esta
es por debajo de -20ºC.
95.
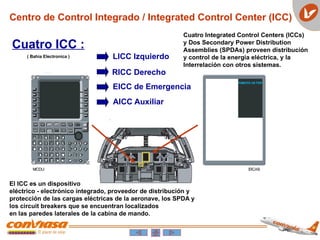
Centro de ControlIntegrado / Integrated Control Center (ICC)
Cuatro ICC :
LICC Izquierdo
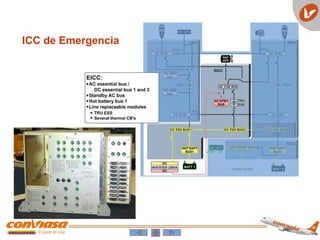
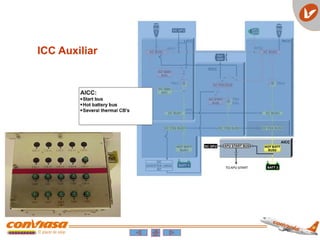
RICC Derecho
EICC de Emergencia
AICC Auxiliar
Cuatro Integrated Control Centers (ICCs)
y Dos Secondary Power Distribution
Assemblies (SPDAs) proveen distribución
y control de la energía eléctrica, y la
Interrelación con otros sistemas.
El ICC es un dispositivo
eléctrico - electrónico integrado, proveedor de distribución y
protección de las cargas eléctricas de la aeronave, los SPDA y
los circuit breakers que se encuentran localizados
en las paredes laterales de la cabina de mando.
( Bahia Electronica )
96.
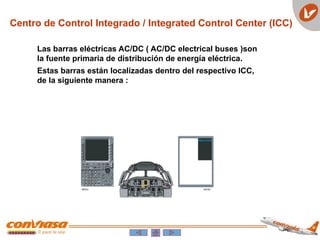
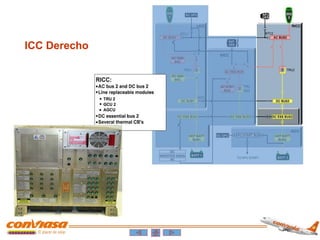
Centro de ControlIntegrado / Integrated Control Center (ICC)
• Cada ICC (instalados en la bahía electrónica) incorpora :
Thermal circuit brakers (CBs),
Line replaceable units (LRUs),
Line replaceable modules (LRMs)
AC/DC eléctrica buses.
• Los LRUs y LRMs permiten un rápido acceso y fácil reemplazo de componentes
eléctricos, por lo tanto minimizando cualquier atraso por mantenimiento.
97.
Las barras eléctricasAC/DC ( AC/DC electrical buses )son
la fuente primaria de distribución de energía eléctrica.
Estas barras están localizadas dentro del respectivo ICC,
de la siguiente manera :
Centro de Control Integrado / Integrated Control Center (ICC)
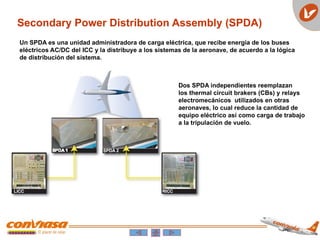
Secondary Power DistributionAssembly (SPDA)
Un SPDA es una unidad administradora de carga eléctrica, que recibe energía de los buses
eléctricos AC/DC del ICC y la distribuye a los sistemas de la aeronave, de acuerdo a la lógica
de distribución del sistema.
Dos SPDA independientes reemplazan
los thermal circuit brakers (CBs) y relays
electromecánicos utilizados en otras
aeronaves, lo cual reduce la cantidad de
equipo eléctrico así como carga de trabajo
a la tripulación de vuelo.
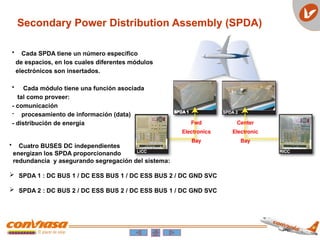
103.
Fwd
Electronics
Bay
Center
Electronic
Bay
• Cada SPDAtiene un número específico
de espacios, en los cuales diferentes módulos
electrónicos son insertados.
• Cada módulo tiene una función asociada
tal como proveer:
- comunicación
- procesamiento de información (data)
- distribución de energía
Secondary Power Distribution Assembly (SPDA)
• Cuatro BUSES DC independientes
energizan los SPDA proporcionando
redundancia y asegurando segregación del sistema:
SPDA 1 : DC BUS 1 / DC ESS BUS 1 / DC ESS BUS 2 / DC GND SVC
SPDA 2 : DC BUS 2 / DC ESS BUS 2 / DC ESS BUS 1 / DC GND SVC
104.
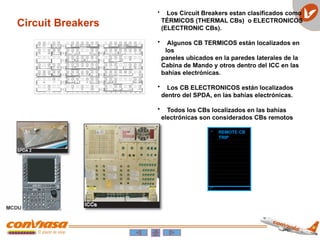
Circuit Breakers
• REMOTECB
TRIP
• Los Circuit Breakers estan clasificados como
TÉRMICOS (THERMAL CBs) o ELECTRONICOS
(ELECTRONIC CBs).
• Algunos CB TERMICOS están localizados en
los
paneles ubicados en la paredes laterales de la
Cabina de Mando y otros dentro del ICC en las
bahías electrónicas.
• Los CB ELECTRONICOS están localizados
dentro del SPDA, en las bahías electrónicas.
• Todos los CBs localizados en las bahías
electrónicas son considerados CBs remotos
105.
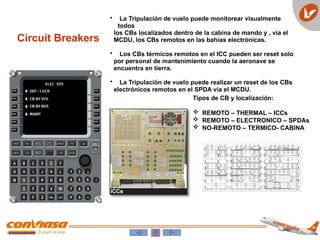
• La Tripulaciónde vuelo puede monitorear visualmente
todos
los CBs localizados dentro de la cabina de mando y , vía el
MCDU, los CBs remotos en las bahías electrónicas.
• Los CBs térmicos remotos en el ICC pueden ser reset solo
por personal de mantenimiento cuando la aeronave se
encuentra en tierra.
• La Tripulación de vuelo puede realizar un reset de los CBs
electrónicos remotos en el SPDA vía el MCDU.
Circuit Breakers
Tipos de CB y localización:
REMOTO – THERMAL – ICCs
REMOTO – ELECTRONICO – SPDAs
NO-REMOTO – TERMICO- CABINA
106.
CB MENU
FUSE
MAINT
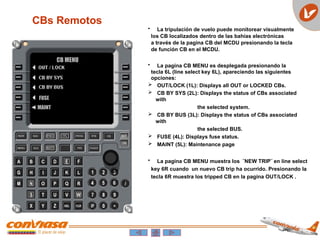
CBs Remotos
•La tripulación de vuelo puede monitorear visualmente
los CB localizados dentro de las bahías electrónicas
a través de la pagina CB del MCDU presionando la tecla
de función CB en el MCDU.
• La pagina CB MENU es desplegada presionando la
tecla 6L (line select key 6L), apareciendo las siguientes
opciones:
OUT/LOCK (1L): Displays all OUT or LOCKED CBs.
CB BY SYS (2L): Displays the status of CBs associated
with
the selected system.
CB BY BUS (3L): Displays the status of CBs associated
with
the selected BUS.
FUSE (4L): Displays fuse status.
MAINT (5L): Maintenance page
• La pagina CB MENU muestra los ¨NEW TRIP¨ en line select
key 6R cuando un nuevo CB trip ha ocurrido. Presionando la
tecla 6R muestra los tripped CB en la pagina OUT/LOCK .
107.
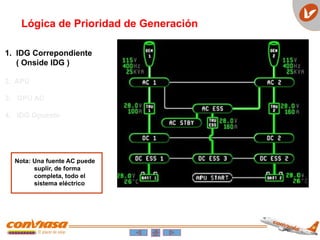
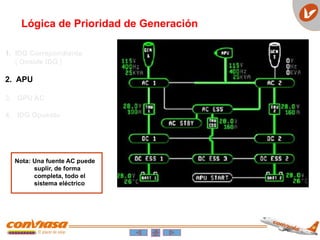
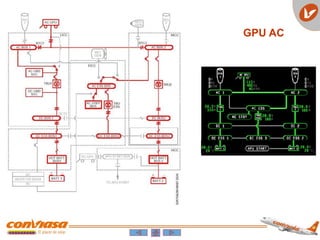
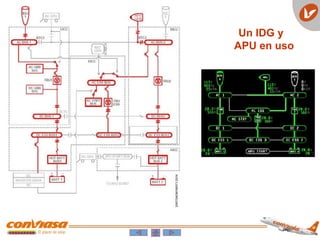
Lógica de Prioridadde Generación
1. IDG Correpondiente
( Onside IDG )
2. APU
3. GPU AC
4. IDG Opuesto
Nota: Una fuente AC puede
suplir, de forma
completa, todo el
sistema eléctrico
108.
Nota: Una fuenteAC puede
suplir, de forma
completa, todo el
sistema eléctrico
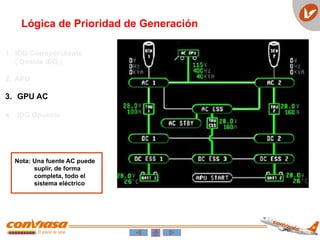
1. IDG Correpondiente
( Onside IDG )
2. APU
3. GPU AC
4. IDG Opuesto
Lógica de Prioridad de Generación
109.
Nota: Una fuenteAC puede
suplir, de forma
completa, todo el
sistema eléctrico
1. IDG Correpondiente
( Onside IDG )
2. APU
3. GPU AC
4. IDG Opuesto
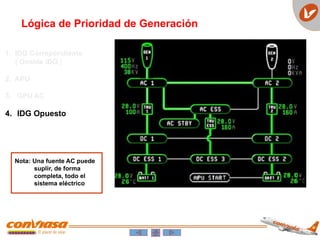
Lógica de Prioridad de Generación
110.
Nota: Una fuenteAC puede
suplir, de forma
completa, todo el
sistema eléctrico
1. IDG Correpondiente
( Onside IDG )
2. APU
3. GPU AC
4. IDG Opuesto
Lógica de Prioridad de Generación
111.
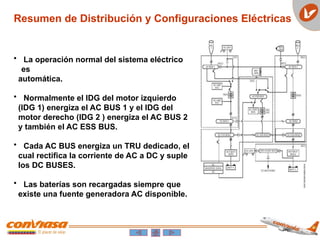
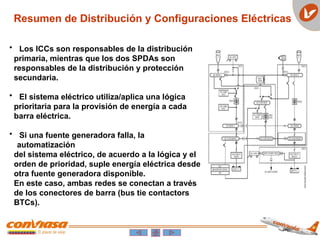
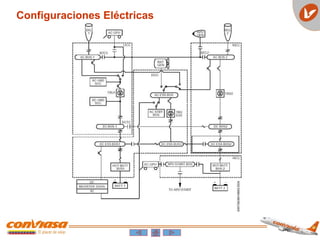
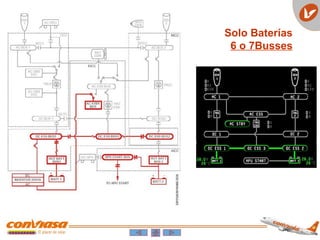
Resumen de Distribucióny Configuraciones Eléctricas
• La operación normal del sistema eléctrico
es
automática.
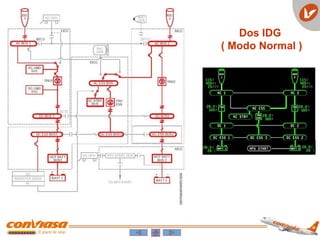
• Normalmente el IDG del motor izquierdo
(IDG 1) energiza el AC BUS 1 y el IDG del
motor derecho (IDG 2 ) energiza el AC BUS 2
y también el AC ESS BUS.
• Cada AC BUS energiza un TRU dedicado, el
cual rectifica la corriente de AC a DC y suple
los DC BUSES.
• Las baterías son recargadas siempre que
existe una fuente generadora AC disponible.
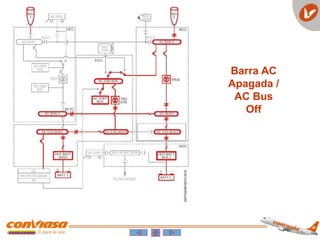
112.
Resumen de Distribucióny Configuraciones Eléctricas
• Los ICCs son responsables de la distribución
primaria, mientras que los dos SPDAs son
responsables de la distribución y protección
secundaria.
• El sistema eléctrico utiliza/aplica una lógica
prioritaria para la provisión de energía a cada
barra eléctrica.
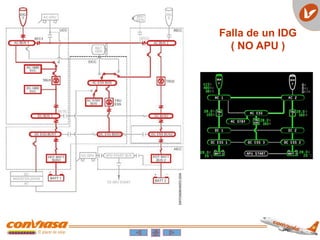
• Si una fuente generadora falla, la
automatización
del sistema eléctrico, de acuerdo a la lógica y el
orden de prioridad, suple energía eléctrica desde
otra fuente generadora disponible.
En este caso, ambas redes se conectan a través
de los conectores de barra (bus tie contactors
BTCs).
113.
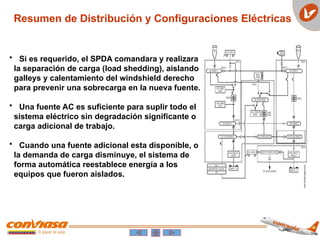
Resumen de Distribucióny Configuraciones Eléctricas
• Si es requerido, el SPDA comandara y realizara
la separación de carga (load shedding), aislando
galleys y calentamiento del windshield derecho
para prevenir una sobrecarga en la nueva fuente.
• Una fuente AC es suficiente para suplir todo el
sistema eléctrico sin degradación significante o
carga adicional de trabajo.
• Cuando una fuente adicional esta disponible, o
la demanda de carga disminuye, el sistema de
forma automática reestablece energía a los
equipos que fueron aislados.
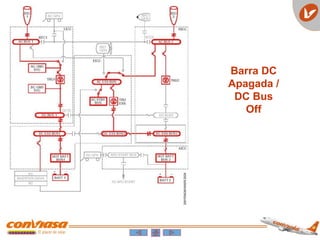
114.
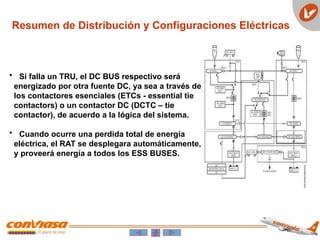
Resumen de Distribucióny Configuraciones Eléctricas
• Si falla un TRU, el DC BUS respectivo será
energizado por otra fuente DC, ya sea a través de
los contactores esenciales (ETCs - essential tie
contactors) o un contactor DC (DCTC – tie
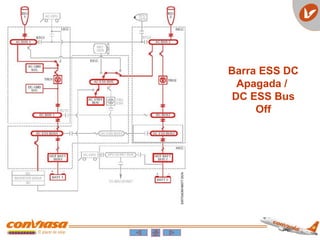
contactor), de acuerdo a la lógica del sistema.
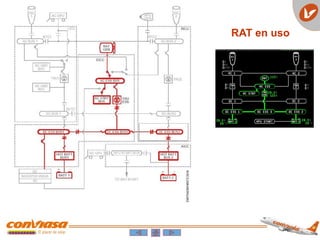
• Cuando ocurre una perdida total de energía
eléctrica, el RAT se desplegara automáticamente,
y proveerá energía a todos los ESS BUSES.
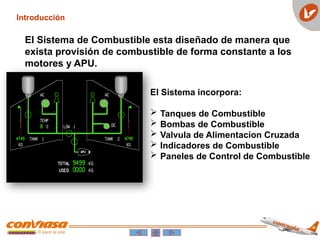
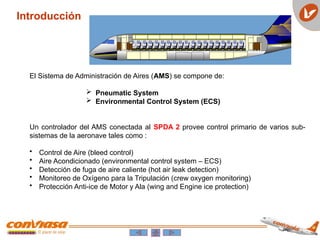
Introducción
El Sistema deCombustible esta diseñado de manera que
exista provisión de combustible de forma constante a los
motores y APU.
El Sistema incorpora:
Tanques de Combustible
Bombas de Combustible
Valvula de Alimentacion Cruzada
Indicadores de Combustible
Paneles de Control de Combustible
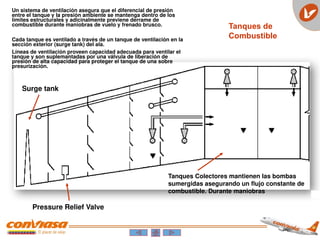
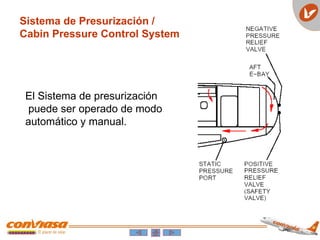
131.
Un sistema deventilación asegura que el diferencial de presión
entre el tanque y la presión ambiente se mantenga dentro de los
límites estructurales y adicinalmente previene derrame de
combustible durante maniobras de vuelo y frenado brusco.
Cada tanque es ventilado a través de un tanque de ventilación en la
sección exterior (surge tank) del ala.
Líneas de ventilación proveen capacidad adecuada para ventilar el
tanque y son suplemantadas por una válvula de liberación de
presión de alta capacidad para proteger el tanque de una sobre
presurización.
Surge tank
Pressure Relief Valve
Tanques Colectores mantienen las bombas
sumergidas asegurando un flujo constante de
combustible. Durante maniobras
Tanques de
Combustible
132.
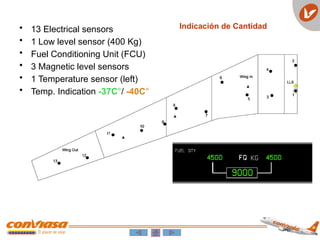
• 13 Electricalsensors
• 1 Low level sensor (400 Kg)
• Fuel Conditioning Unit (FCU)
• 3 Magnetic level sensors
• 1 Temperature sensor (left)
• Temp. Indication -37C°/ -40C°
Indicación de Cantidad
133.
Capacidad de CombustibleEMB-190 AR
Combustible Utilizable
Max. Total de Combustible Utilizable 13.100 Kgs. (4,268 gal.)
(6.550 Kgs. por tanque)
Combustible No-Utilizable por Tanque
46 Kgs.
Máximo Desbalance permitido
entre tanques: 360 Kgs.
134.
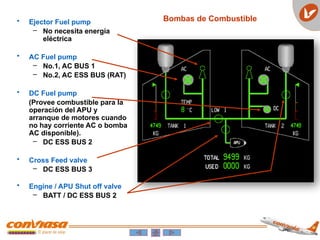
• Ejector Fuelpump
– No necesita energía
eléctrica
• AC Fuel pump
– No.1, AC BUS 1
– No.2, AC ESS BUS (RAT)
• DC Fuel pump
(Provee combustible para la
operación del APU y
arranque de motores cuando
no hay corriente AC o bomba
AC disponible).
– DC ESS BUS 2
• Cross Feed valve
– DC ESS BUS 3
• Engine / APU Shut off valve
– BATT / DC ESS BUS 2
Bombas de Combustible
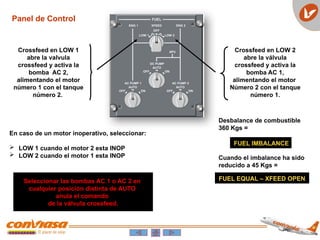
Crossfeed en LOW1
abre la valvula
crossfeed y activa la
bomba AC 2,
alimentando el motor
número 1 con el tanque
número 2.
Crossfeed en LOW 2
abre la válvula
crossfeed y activa la
bomba AC 1,
alimentando el motor
Número 2 con el tanque
número 1.
Desbalance de combustible
360 Kgs =
Cuando el imbalance ha sido
reducido a 45 Kgs =
En caso de un motor inoperativo, seleccionar:
LOW 1 cuando el motor 2 esta INOP
LOW 2 cuando el motor 1 esta INOP
FUEL IMBALANCE
FUEL EQUAL – XFEED OPEN
Seleccionar las bombas AC 1 o AC 2 en
cualquier posición distinta de AUTO
anula el comando
de la válvula crossfeed.
Panel de Control
137.
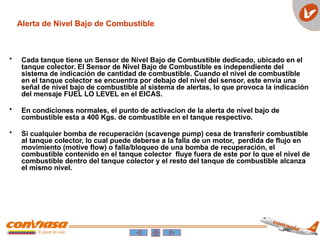
Alerta de NivelBajo de Combustible
• Cada tanque tiene un Sensor de Nivel Bajo de Combustible dedicado, ubicado en el
tanque colector. El Sensor de Nivel Bajo de Combustible es independiente del
sistema de indicación de cantidad de combustible. Cuando el nivel de combustible
en el tanque colector se encuentra por debajo del nivel del sensor, este envía una
señal de nivel bajo de combustible al sistema de alertas, lo que provoca la indicación
del mensaje FUEL LO LEVEL en el EICAS.
• En condiciones normales, el punto de activacion de la alerta de nivel bajo de
combustible esta a 400 Kgs. de combustible en el tanque respectivo.
• Si cualquier bomba de recuperación (scavenge pump) cesa de transferir combustible
al tanque colector, lo cual puede deberse a la falla de un motor, perdida de flujo en
movimiento (motive flow) o falla/bloqueo de una bomba de recuperación, el
combustible contenido en el tanque colector fluye fuera de este por lo que el nivel de
combustible dentro del tanque colector y el resto del tanque de combustible alcanza
el mismo nivel.
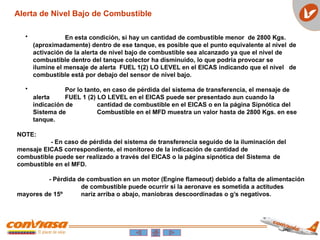
138.
• En estacondición, si hay un cantidad de combustible menor de 2800 Kgs.
(aproximadamente) dentro de ese tanque, es posible que el punto equivalente al nivel de
activación de la alerta de nivel bajo de combustible sea alcanzado ya que el nivel de
combustible dentro del tanque colector ha disminuido, lo que podria provocar se
ilumine el mensaje de alerta FUEL 1(2) LO LEVEL en el EICAS indicando que el nivel de
combustible está por debajo del sensor de nivel bajo.
• Por lo tanto, en caso de pérdida del sistema de transferencia, el mensaje de
alerta FUEL 1 (2) LO LEVEL en el EICAS puede ser presentado aun cuando la
indicación de cantidad de combustible en el EICAS o en la página Sipnótica del
Sistema de Combustible en el MFD muestra un valor hasta de 2800 Kgs. en ese
tanque.
NOTE:
- En caso de pérdida del sistema de transferencia seguido de la iluminación del
mensaje EICAS correspondiente, el monitoreo de la indicación de cantidad de
combustible puede ser realizado a través del EICAS o la página sipnótica del Sistema de
combustible en el MFD.
- Pérdida de combustion en un motor (Engine flameout) debido a falta de alimentación
de combustible puede ocurrir si la aeronave es sometida a actitudes
mayores de 15º nariz arriba o abajo, maniobras descoordinadas o g’s negativos.
Alerta de Nivel Bajo de Combustible
139.
Panel de Aprovisionamientoy Vaciado de Combustible
• Modo Automático: Se detiene automáticamente a un nivel pre-seleccionado
• Modo Manual: Debe ser detenido manualmente en el nivel deseado
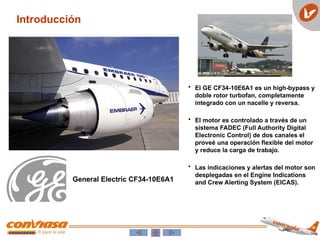
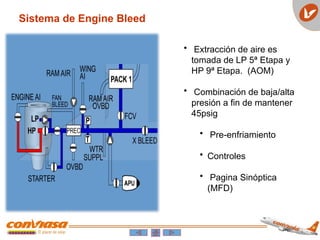
Introducción
• El GECF34-10E6A1 es un high-bypass y
doble rotor turbofan, completamente
integrado con un nacelle y reversa.
• El motor es controlado a través de un
sistema FADEC (Full Authority Digital
Electronic Control) de dos canales el
proveé una operación flexible del motor
y reduce la carga de trabajo.
• Las indicaciones y alertas del motor son
desplegadas en el Engine Indications
and Crew Alerting System (EICAS).
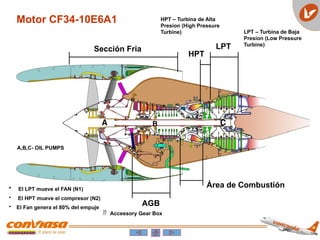
General Electric CF34-10E6A1
143.
Sección Fria
HPT
LPT
A BC
AGB
Área de Combustión
Accessory Gear Box
A,B,C- OIL PUMPS
• El LPT mueve el FAN (N1)
• El HPT mueve el compresor (N2)
• El Fan genera el 80% del empuje
Motor CF34-10E6A1 HPT – Turbina de Alta
Presion (High Pressure
Turbine) LPT – Turbina de Baja
Presion (Low Pressure
Turbine)
145.
• La velocidaddel Fan es el parámetro utilizado para ajustar la potencia
del motor.
• El FADEC controla la velocidad del Fan para la potencia necesaria basada
en la presión de altitud, temperatura y Mach.
Indicación N1
146.
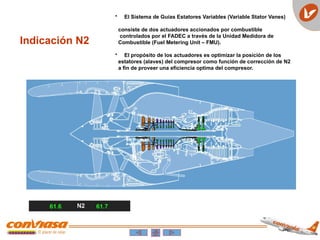
Indicación N2
• ElSistema de Guías Estatores Variables (Variable Stator Vanes)
consiste de dos actuadores accionados por combustible
controlados por el FADEC a través de la Unidad Medidora de
Combustible (Fuel Metering Unit – FMU).
• El propósito de los actuadores es optimizar la posición de los
estatores (alaves) del compresor como función de corrección de N2
a fin de proveer una eficiencia optima del compresor.
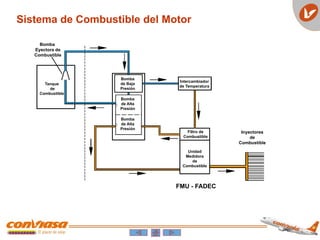
Sistema de Combustibledel Motor
Bomba
Eyectora de
Combustible
Tanque
de
Combustible
Bomba
de Baja
Presión
Bomba
de Alta
Presión
Bomba
de Alta
Presión
Intercambiador
de Temperatura
Filtro de
Combustible
Unidad
Medidora
de
Combustible
Inyectores
de
Combustible
FMU - FADEC
149.
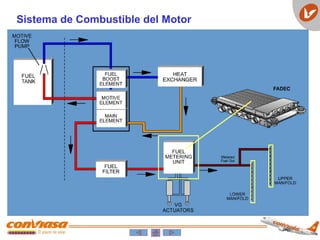
Sistema de Combustibledel Motor
Bomba
Eyectora de
Combustible
Tanque
de
Combustible
Bomba
de Baja
Presion
Bomba
de Alta
Presion
Bomba
de Alta
Presion
Intercambiador
de Temperatura
Filtro de
Combustible
Unidad
Medidora
de
Combustible
Inyectores
de
Combustible
FMU - FADEC
Engine EMB-190
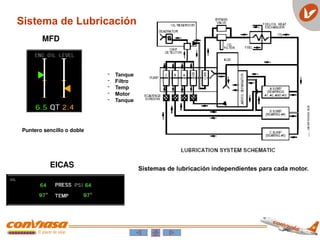
Sistema deLubricación
MFD
EICAS
Puntero sencillo o doble
- Tanque
- Filtro
- Temp
- Motor
- Tanque
152.
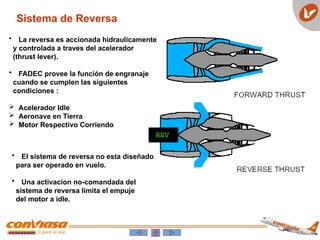
Sistema de Reversa
•La reversa es accionada hidraulicamente
y controlada a traves del acelerador
(thrust lever).
• FADEC provee la función de engranaje
cuando se cumplen las siguientes
condiciones :
Acelerador Idle
Aeronave en Tierra
Motor Respectivo Corriendo
• El sistema de reversa no esta diseñado
para ser operado en vuelo.
• Una activacion no-comandada del
sistema de reversa limita el empuje
del motor a idle.
153.
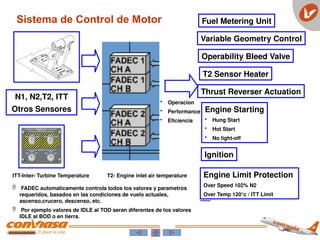
N1, N2,T2, ITT
OtrosSensores
Fuel Metering Unit
Variable Geometry Control
Operability Bleed Valve
T2 Sensor Heater
Thrust Reverser Actuation
Engine Starting
• Hung Start
• Hot Start
• No light-off
Ignition
Sistema de Control de Motor
• Operacion
• Performance
• Eficiencia
ITT-Inter- Turbine Temperature T2- Engine inlet air temperature
FADEC automaticamente controla todos los valores y parametros
requeridos, basados en las condiciones de vuelo actuales,
ascenso,crucero, descenso, etc.
Por ejemplo valores de IDLE al TOD seran diferentes de los valores
IDLE al BOD o en tierra.
Engine Limit Protection
Over Speed 102% N2
Over Temp 120°c / ITT Limit
154.
Engine EMB-190
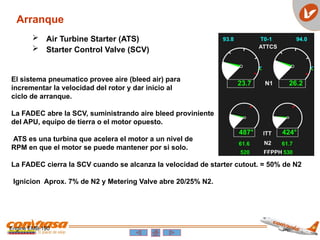
Arranque
AirTurbine Starter (ATS)
Starter Control Valve (SCV)
El sistema pneumatico provee aire (bleed air) para
incrementar la velocidad del rotor y dar inicio al
ciclo de arranque.
La FADEC abre la SCV, suministrando aire bleed proviniente
del APU, equipo de tierra o el motor opuesto.
ATS es una turbina que acelera el motor a un nivel de
RPM en que el motor se puede mantener por si solo.
La FADEC cierra la SCV cuando se alcanza la velocidad de starter cutout. = 50% de N2
Ignicion Aprox. 7% de N2 y Metering Valve abre 20/25% N2.
155.
Engine EMB-190
Ignición
El sistemade ignición provee una chispa eléctrica
para combustión en encendidos:
En tierra
En vuelo
Auto-relights
Selector de ignicion en OVRD
FADEC energiza 1 igniter para encendidos en tierra y
ambos igniters para encendidos en vuelo.
Colocando el selector en OVRD mantiene ambos
igniters energizados. Igniters 1B y 2B estan
conectados al SPDA 2. En caso de falla del SPDA 2, al
colocar el selector en OVRD se energizan los ignt A.
156.
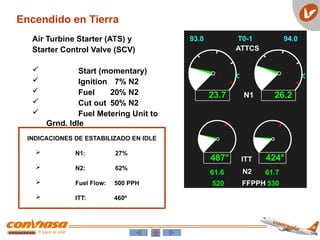
Encendido en Tierra
AirTurbine Starter (ATS) y
Starter Control Valve (SCV)
Start (momentary)
Ignition 7% N2
Fuel 20% N2
Cut out 50% N2
Fuel Metering Unit to
Grnd. Idle
INDICACIONES DE ESTABILIZADO EN IDLE
N1: 27%
N2: 62%
Fuel Flow: 500 PPH
ITT: 460º
157.
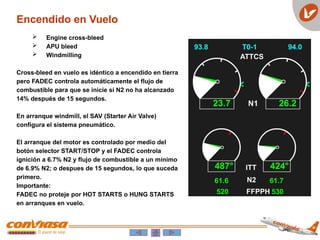
Encendido en Vuelo
Engine cross-bleed
APU bleed
Windmilling
Cross-bleed en vuelo es idéntico a encendido en tierra
pero FADEC controla automáticamente el flujo de
combustible para que se inicie si N2 no ha alcanzado
14% después de 15 segundos.
En arranque windmill, el SAV (Starter Air Valve)
configura el sistema pneumático.
El arranque del motor es controlado por medio del
botón selector START/STOP y el FADEC controla
ignición a 6.7% N2 y flujo de combustible a un mínimo
de 6.9% N2; o despues de 15 segundos, lo que suceda
primero.
Importante:
FADEC no proteje por HOT STARTS o HUNG STARTS
en arranques en vuelo.
158.
Protección de FADECpara el Arrancado de Motor
La lógica de protección de FADEC provee:
• Automáticamente: (WOW)
• HOT START: El encendido sera interrumpido si el ITT sube por
encima del límite, cerrando la válvula medidora de
combustible (FMV) y cancelando ignición. FADEC NO
DESENERGIZARA el arrancador (starter drive) para
permitir enfriado por medio de motoring, ( el selector
de arranque debe ser movido a STOP para terminar el
motoring.
• HUNG START protection
• NO LIGHT-OFF START protection
Nota: Las protecciones de Hot y Hung start son inhibidas en vuelo.
159.
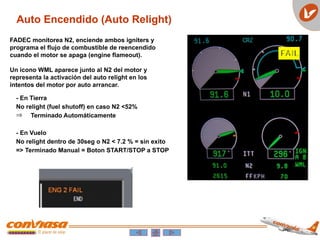
Auto Encendido (AutoRelight)
FADEC monitorea N2, enciende ambos igniters y
programa el flujo de combustible de reencendido
cuando el motor se apaga (engine flameout).
Un icono WML aparece junto al N2 del motor y
representa la activación del auto relight en los
intentos del motor por auto arrancar.
- En Tierra
No relight (fuel shutoff) en caso N2 <52%
Þ Terminado Automáticamente
- En Vuelo
No relight dentro de 30seg o N2 < 7.2 % = sin exito
=> Terminado Manual = Boton START/STOP a STOP
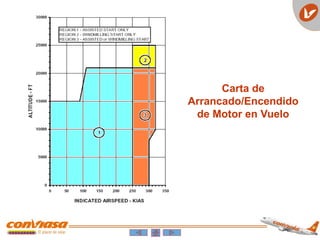
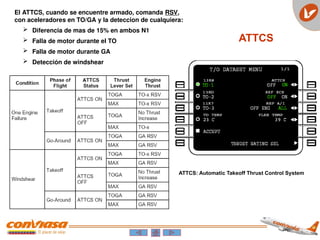
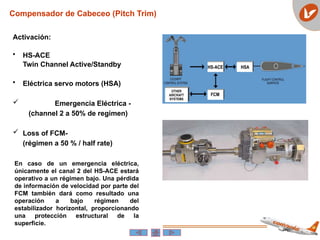
El ATTCS, cuandose encuentre armado, comanda RSV,
con aceleradores en TO/GA y la deteccion de cualquiera:
Diferencia de mas de 15% en ambos N1
Falla de motor durante el TO
Falla de motor durante GA
Detección de windshear
ATTCS: Automatic Takeoff Thrust Control System
ATTCS
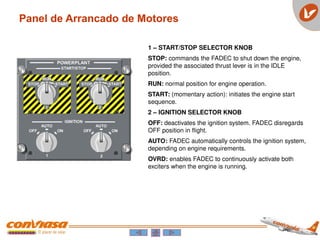
1 – START/STOPSELECTOR KNOB
STOP: commands the FADEC to shut down the engine,
provided the associated thrust lever is in the IDLE
position.
RUN: normal position for engine operation.
START: (momentary action): initiates the engine start
sequence.
2 – IGNITION SELECTOR KNOB
OFF: deactivates the ignition system. FADEC disregards
OFF position in flight.
AUTO: FADEC automatically controls the ignition system,
depending on engine requirements.
OVRD: enables FADEC to continuously activate both
exciters when the engine is running.
Panel de Arrancado de Motores
166.
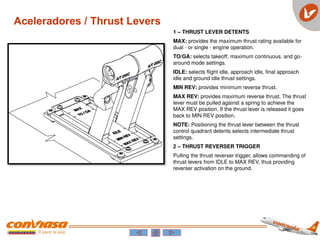
1 – THRUSTLEVER DETENTS
MAX: provides the maximum thrust rating available for
dual - or single - engine operation.
TO/GA: selects takeoff, maximum continuous, and go-
around mode settings.
IDLE: selects flight idle, approach idle, final approach
idle and ground idle thrust settings.
MIN REV: provides minimum reverse thrust.
MAX REV: provides maximum reverse thrust. The thrust
lever must be pulled against a spring to achieve the
MAX REV position. If the thrust lever is released it goes
back to MIN REV position.
NOTE: Positioning the thrust lever between the thrust
control quadrant detents selects intermediate thrust
settings.
2 – THRUST REVERSER TRIGGER
Pulling the thrust reverser trigger, allows commanding of
thrust levers from IDLE to MAX REV, thus providing
reverser activation on the ground.
Aceleradores / Thrust Levers
167.
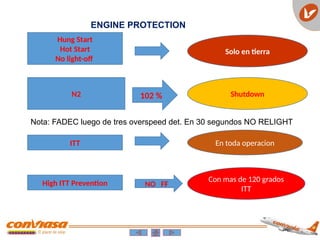
ENGINE PROTECTION
Hung Start
HotStart
No light-off
Solo en tierra
N2 102 % Shutdown
Nota: FADEC luego de tres overspeed det. En 30 segundos NO RELIGHT
ITT En toda operacion
High ITT Prevention NO FF
Con mas de 120 grados
ITT
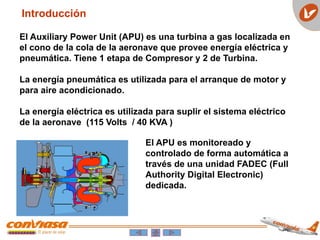
Introducción
El Auxiliary PowerUnit (APU) es una turbina a gas localizada en
el cono de la cola de la aeronave que provee energía eléctrica y
pneumática. Tiene 1 etapa de Compresor y 2 de Turbina.
La energía pneumática es utilizada para el arranque de motor y
para aire acondicionado.
La energía eléctrica es utilizada para suplir el sistema eléctrico
de la aeronave (115 Volts / 40 KVA )
El APU es monitoreado y
controlado de forma automática a
través de una unidad FADEC (Full
Authority Digital Electronic)
dedicada.
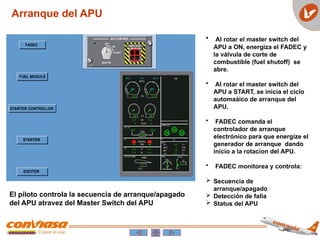
• Al rotarel master switch del
APU a ON, energiza el FADEC y
la válvula de corte de
combustible (fuel shutoff) se
abre.
• Al rotar el master switch del
APU a START, se inicia el ciclo
automaáico de arranque del
APU.
• FADEC comanda el
controlador de arranque
electrónico para que energize el
generador de arranque dando
inicio a la rotacion del APU.
• FADEC monitorea y controla:
Secuencia de
arranque/apagado
Detección de falla
Status del APU
Arranque del APU
El piloto controla la secuencia de arranque/apagado
del APU atravez del Master Switch del APU
173.
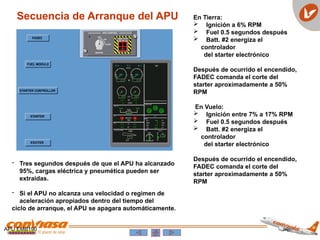
APU EMB190
Secuencia deArranque del APU En Tierra:
Ignición a 6% RPM
Fuel 0.5 segundos después
Batt. #2 energiza el
controlador
del starter electrónico
Después de ocurrido el encendido,
FADEC comanda el corte del
starter aproximadamente a 50%
RPM
En Vuelo:
Ignición entre 7% a 17% RPM
Fuel 0.5 segundos después
Batt. #2 energiza el
controlador
del starter electrónico
Después de ocurrido el encendido,
FADEC comanda el corte del
starter aproximadamente a 50%
RPM
- Tres segundos después de que el APU ha alcanzado
95%, cargas eléctrica y pneumética pueden ser
extraidas.
- Si el APU no alcanza una velocidad o regimen de
aceleración apropiados dentro del tiempo del
ciclo de arranque, el APU se apagara automáticamente.
174.
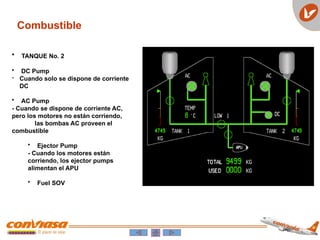
Combustible
• TANQUE No.2
• DC Pump
- Cuando solo se dispone de corriente
DC
• AC Pump
- Cuando se dispone de corriente AC,
pero los motores no están corriendo,
las bombas AC proveen el
combustible
• Ejector Pump
- Cuando los motores están
corriendo, los ejector pumps
alimentan el APU
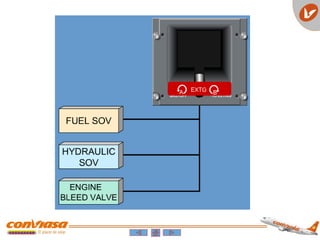
• Fuel SOV
175.
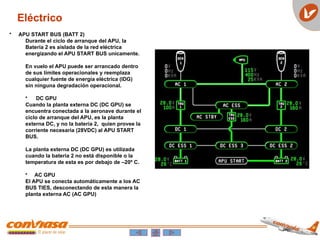
Eléctrico
• APU STARTBUS (BATT 2)
Durante el ciclo de arranque del APU, la
Batería 2 es aislada de la red eléctrica
energizando el APU START BUS unicamente.
En vuelo el APU puede ser arrancado dentro
de sus límites operacionales y reemplaza
cualquier fuente de energía eléctrica (IDG)
sin ninguna degradación operacional.
• DC GPU
Cuando la planta externa DC (DC GPU) se
encuentra conectada a la aeronave durante el
ciclo de arranque del APU, es la planta
externa DC, y no la batería 2, quien provee la
corriente necesaria (28VDC) al APU START
BUS.
La planta externa DC (DC GPU) es utilizada
cuando la bateria 2 no está disponible o la
temperatura de esta es por debajo de –20º C.
• AC GPU
El APU se conecta automáticamente a los AC
BUS TIES, desconectando de esta manera la
planta externa AC (AC GPU)
176.
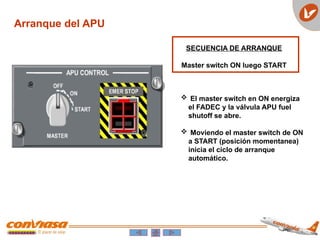
Arranque del APU
SECUENCIADE ARRANQUE
Master switch ON luego START
El master switch en ON energiza
el FADEC y la válvula APU fuel
shutoff se abre.
Moviendo el master switch de ON
a START (posición momentanea)
inicia el ciclo de arranque
automático.
177.
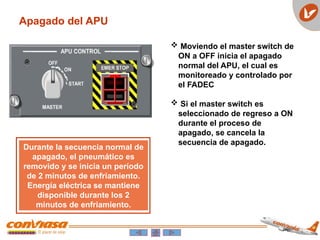
Apagado del APU
Moviendo el master switch de
ON a OFF inicia el apagado
normal del APU, el cual es
monitoreado y controlado por
el FADEC
Si el master switch es
seleccionado de regreso a ON
durante el proceso de
apagado, se cancela la
secuencia de apagado.
Durante la secuencia normal de
apagado, el pneumático es
removido y se inicia un período
de 2 minutos de enfriamiento.
Energía eléctrica se mantiene
disponible durante los 2
minutos de enfriamiento.
178.
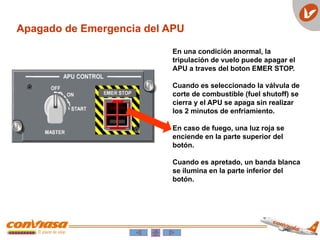
Apagado de Emergenciadel APU
En una condición anormal, la
tripulación de vuelo puede apagar el
APU a traves del boton EMER STOP.
Cuando es seleccionado la válvula de
corte de combustible (fuel shutoff) se
cierra y el APU se apaga sin realizar
los 2 minutos de enfriamiento.
En caso de fuego, una luz roja se
enciende en la parte superior del
botón.
Cuando es apretado, un banda blanca
se ilumina en la parte inferior del
botón.
179.
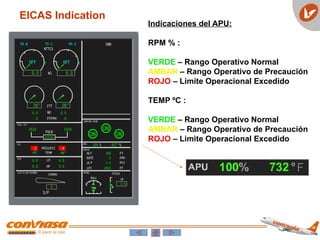
Indicaciones del APU:
RPM% :
VERDE – Rango Operativo Normal
AMBAR – Rango Operativo de Precaución
ROJO – Limite Operacional Excedido
TEMP ºC :
VERDE – Rango Operativo Normal
AMBAR – Rango Operativo de Precaución
ROJO – Limite Operacional Excedido
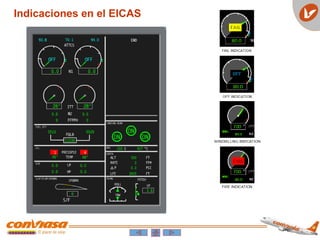
EICAS Indication
180.
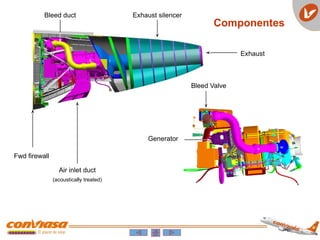
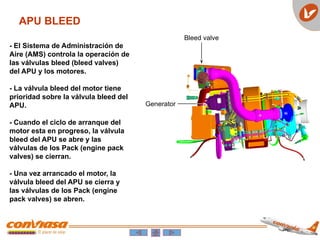
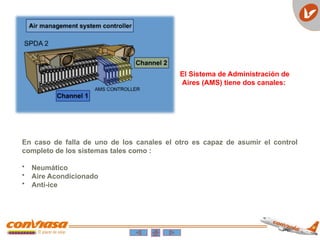
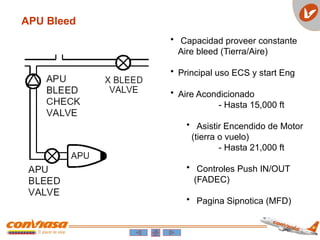
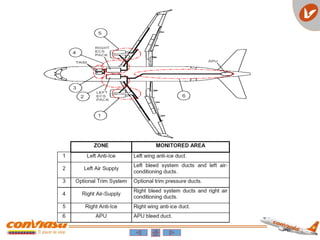
APU BLEED
Bleed valve
Generator
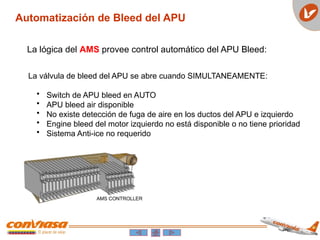
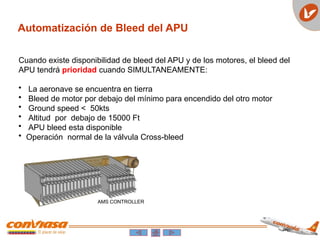
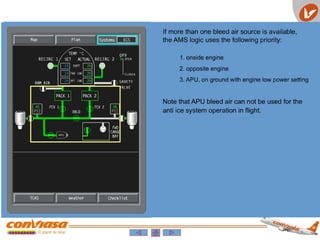
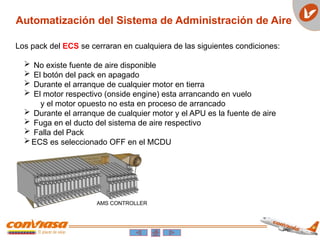
-El Sistema de Administración de
Aire (AMS) controla la operación de
las válvulas bleed (bleed valves)
del APU y los motores.
- La válvula bleed del motor tiene
prioridad sobre la válvula bleed del
APU.
- Cuando el ciclo de arranque del
motor esta en progreso, la válvula
bleed del APU se abre y las
válvulas de los Pack (engine pack
valves) se cierran.
- Una vez arrancado el motor, la
válvula bleed del APU se cierra y
las válvulas de los Pack (engine
pack valves) se abren.
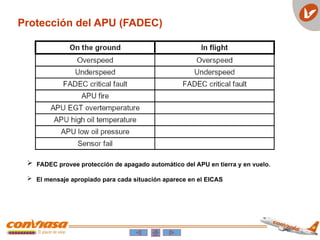
Protección del APU(FADEC)
FADEC provee protección de apagado automático del APU en tierra y en vuelo.
El mensaje apropiado para cada situación aparece en el EICAS
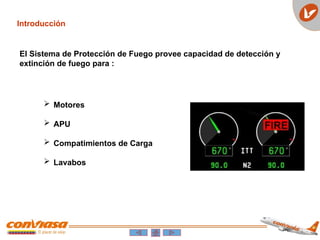
Introducción
Motores
APU
Compatimientos de Carga
Lavabos
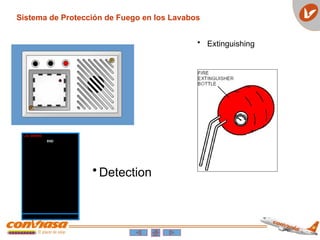
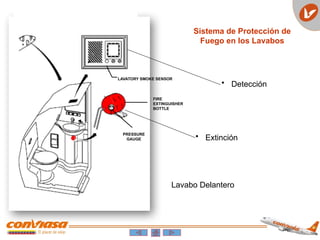
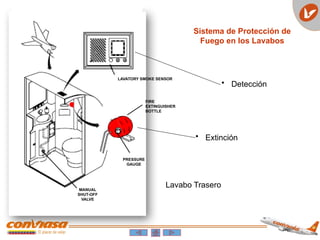
El Sistema de Protección de Fuego provee capacidad de detección y
extinción de fuego para :
187.
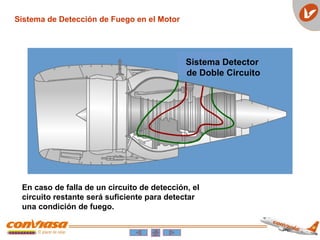
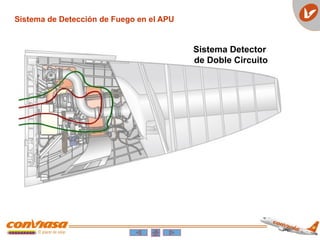
Sistema Detector
de DobleCircuito
Sistema de Detección de Fuego en el Motor
En caso de falla de un circuito de detección, el
circuito restante será suficiente para detectar
una condición de fuego.
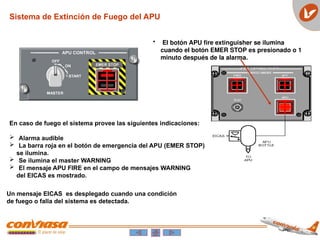
• El botónAPU fire extinguisher se ilumina
cuando el botón EMER STOP es presionado o 1
minuto después de la alarma.
En caso de fuego el sistema provee las siguientes indicaciones:
Alarma audible
La barra roja en el botón de emergencia del APU (EMER STOP)
se ilumina.
Se ilumina el master WARNING
El mensaje APU FIRE en el campo de mensajes WARNING
del EICAS es mostrado.
Un mensaje EICAS es desplegado cuando una condición
de fuego o falla del sistema es detectada.
Sistema de Extinción de Fuego del APU
191.
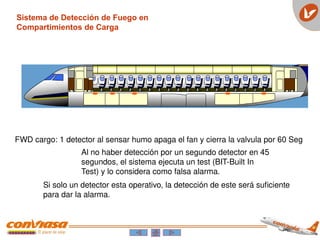
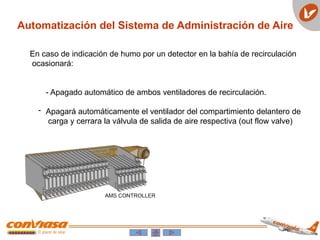
FWD cargo: 1detector al sensar humo apaga el fan y cierra la valvula por 60 Seg
Al no haber detección por un segundo detector en 45
segundos, el sistema ejecuta un test (BIT-Built In
Test) y lo considera como falsa alarma.
Si solo un detector esta operativo, la detección de este será suficiente
para dar la alarma.
Sistema de Detección de Fuego en
Compartimientos de Carga
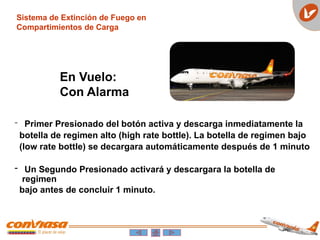
- Primer Presionadodel botón activa y descarga inmediatamente la
botella de regimen alto (high rate bottle). La botella de regimen bajo
(low rate bottle) se decargara automáticamente después de 1 minuto
- Un Segundo Presionado activará y descargara la botella de
regimen
bajo antes de concluir 1 minuto.
Sistema de Extinción de Fuego en
Compartimientos de Carga
En Vuelo:
Con Alarma
194.
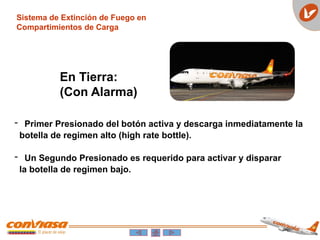
- Primer Presionadodel botón activa y descarga inmediatamente la
botella de regimen alto (high rate bottle).
- Un Segundo Presionado es requerido para activar y disparar
la botella de regimen bajo.
Sistema de Extinción de Fuego en
Compartimientos de Carga
En Tierra:
(Con Alarma)
195.
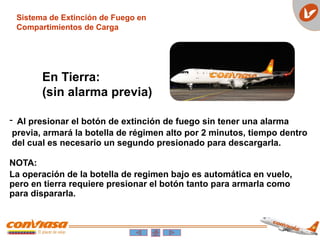
Sistema de Extinciónde Fuego en
Compartimientos de Carga
En Tierra:
(sin alarma previa)
- Al presionar el botón de extinción de fuego sin tener una alarma
previa, armará la botella de régimen alto por 2 minutos, tiempo dentro
del cual es necesario un segundo presionado para descargarla.
NOTA:
La operación de la botella de regimen bajo es automática en vuelo,
pero en tierra requiere presionar el botón tanto para armarla como
para dispararla.
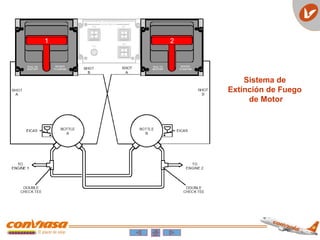
Detección Extinción
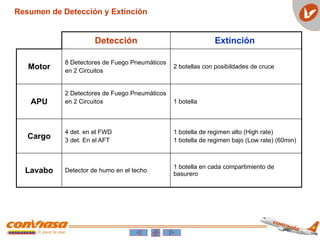
Motor
8 Detectoresde Fuego Pneumáticos
en 2 Circuitos
2 botellas con posibildades de cruce
APU
2 Detectores de Fuego Pneumáticos
en 2 Circuitos 1 botella
Cargo
4 det. en el FWD
3 det. En el AFT
1 botella de regimen alto (High rate)
1 botella de regimen bajo (Low rate) (60min)
Lavabo Detector de humo en el techo
1 botella en cada compartimiento de
basurero
Resumen de Detección y Extinción
200.
El Fire Testdebe iluminar 15 luces y producir
una Alarma Audible.
NOTA: No incluye mensaje EICAS para test del
detector de humo de los lavabos.
Test del Sistema de Detección de Fuego
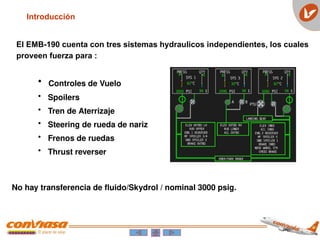
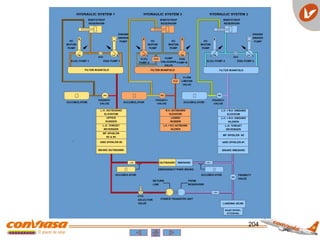
El EMB-190 cuentacon tres sistemas hydraulicos independientes, los cuales
proveen fuerza para :
• Controles de Vuelo
• Spoilers
• Tren de Aterrizaje
• Steering de rueda de nariz
• Frenos de ruedas
• Thrust reverser
No hay transferencia de fluido/Skydrol / nominal 3000 psig.
Introducción
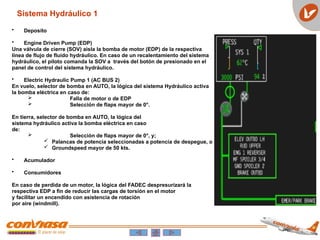
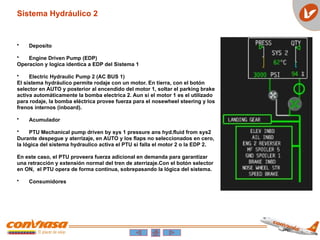
• Deposito
• EngineDriven Pump (EDP)
Una válvula de cierre (SOV) aisla la bomba de motor (EDP) de la respectiva
línea de flujo de fluido hydráulico. En caso de un recalentamiento del sistema
hydráulico, el piloto comanda la SOV a través del botón de presionado en el
panel de control del sistema hydráulico.
• Electric Hydraulic Pump 1 (AC BUS 2)
En vuelo, selector de bomba en AUTO, la lógica del sistema Hydráulico activa
la bomba eléctrica en caso de:
Falla de motor o de EDP
Selección de flaps mayor de 0°.
En tierra, selector de bomba en AUTO, la lógica del
sistema hydráulico activa la bomba eléctrica en caso
de:
Selección de flaps mayor de 0°, y;
Palancas de potencia seleccionadas a potencia de despegue, o
Groundspeed mayor de 50 kts.
• Acumulador
• Consumidores
En caso de perdida de un motor, la lógica del FADEC despresurizará la
respectiva EDP a fin de reducir las cargas de torsión en el motor
y facilitar un encendido con asistencia de rotación
por aire (windmill).
Sistema Hydráulico 1
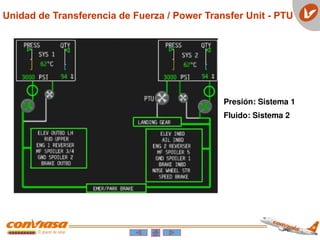
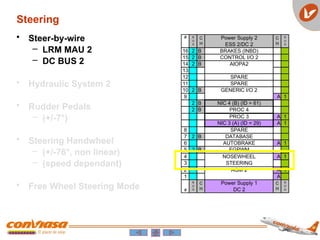
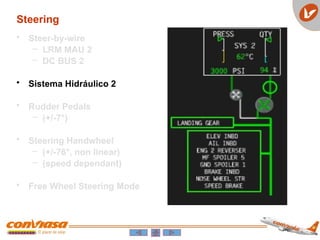
207.
• Deposito
• EngineDriven Pump (EDP)
Operacion y logica identica a EDP del Sistema 1
• Electric Hydraulic Pump 2 (AC BUS 1)
El sistema hydráulico permite rodaje con un motor. En tierra, con el botón
selector en AUTO y posterior al encendido del motor 1, soltar el parking brake
activa automáticamente la bomba electrica 2. Aun si el motor 1 es el utilizado
para rodaje, la bomba eléctrica provee fuerza para el nosewheel steering y los
frenos internos (inboard).
• Acumulador
• PTU Mechanical pump driven by sys 1 pressure ans hyd.fluid from sys2
Durante despegue y aterrizaje, en AUTO y los flaps no seleccionados en cero,
la lógica del sistema hydraulico activa el PTU si falla el motor 2 o la EDP 2.
En este caso, el PTU proveera fuerza adicional en demanda para garantizar
una retracción y extensión normal del tren de aterrizaje.Con el botón selector
en ON, el PTU opera de forma continua, sobrepasando la lógica del sistema.
• Consumidores
Sistema Hydráulico 2
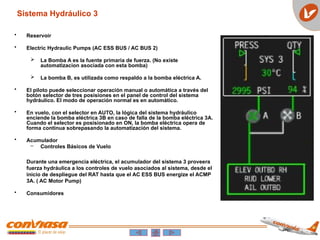
• Reservoir
• ElectricHydraulic Pumps (AC ESS BUS / AC BUS 2)
La Bomba A es la fuente primaria de fuerza. (No existe
automatizacion asociada con esta bomba)
La bomba B, es utilizada como respaldo a la bomba eléctrica A.
• El piloto puede seleccionar operación manual o automática a través del
botón selector de tres posisiones en el panel de control del sistema
hydráulico. El modo de operación normal es en automático.
• En vuelo, con el selector en AUTO, la lógica del sistema hydráulico
enciende la bomba eléctrica 3B en caso de falla de la bomba eléctrica 3A.
Cuando el selector es posisionado en ON, la bomba eléctrica opera de
forma continua sobrepasando la automatización del sistema.
• Acumulador
– Controles Básicos de Vuelo
Durante una emergencia eléctrica, el acumulador del sistema 3 proveera
fuerza hydráulica a los controles de vuelo asociados al sistema, desde el
inicio de despliegue del RAT hasta que el AC ESS BUS energize el ACMP
3A. ( AC Motor Pump)
• Consumidores
Sistema Hydráulico 3
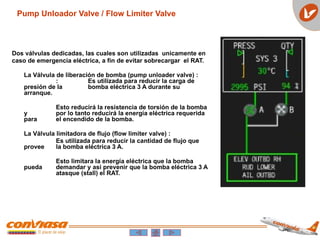
210.
Dos válvulas dedicadas,las cuales son utilizadas unicamente en
caso de emergencia eléctrica, a fin de evitar sobrecargar el RAT.
La Válvula de liberación de bomba (pump unloader valve) :
: Es utilizada para reducir la carga de
presión de la bomba eléctrica 3 A durante su
arranque.
Esto reducirá la resistencia de torsión de la bomba
y por lo tanto reducirá la energía eléctrica requerida
para el encendido de la bomba.
La Válvula limitadora de flujo (flow limiter valve) :
Es utilizada para reducir la cantidad de flujo que
provee la bomba eléctrica 3 A.
Esto limitara la energía eléctrica que la bomba
pueda demandar y asi prevenir que la bomba eléctrica 3 A
atasque (stall) el RAT.
Pump Unloador Valve / Flow Limiter Valve
211.
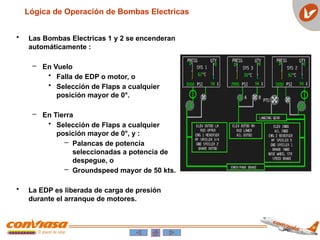
• Las BombasElectricas 1 y 2 se encenderan
automáticamente :
– En Vuelo
• Falla de EDP o motor, o
• Selección de Flaps a cualquier
posición mayor de 0°.
– En Tierra
• Selección de Flaps a cualquier
posición mayor de 0°, y :
– Palancas de potencia
seleccionadas a potencia de
despegue, o
– Groundspeed mayor de 50 kts.
• La EDP es liberada de carga de presión
durante el arranque de motores.
Lógica de Operación de Bombas Electricas
El Sistema deTren de Aterrizaje provee a la aeronave
capacidad de desplazamiento en tierra, permitiendo de
esa manera operaciones de carrera de despegue,
aterrizaje y rodaje.
• Tren de Aterrizaje
• Frenos
• Steering
Generalidades
215.
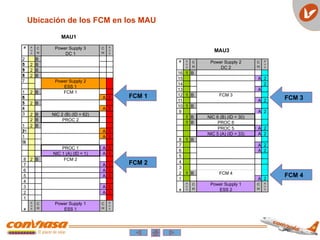
20 B
19 2B
18 2 B CMC
17 2 B GPS 1
16 2 B
15 A 1
14 2 B
13 A 1
2 B NIC 2 (B) (ID = 62)
2 B PROC 2
12 2 B
11 A 1
10 A 1
9
PROC 1 A 1
NIC 1 (A) (ID = 1) A 1
8 2 B
7 A 1
6 CONTROL I/O 1 A 1
5 BRAKES (OUTBD) A 1
4
3 A 1
2 A 1
1
#
C
H
B
U
S
# B
U
S
B
U
S
GENERIC I/O 1
C
H
Power Supply 3
DC 1
C
H
AGM 1
Power Supply 2
ESS 1
PSEM 1
B
U
S
C
H
Power Supply 1
ESS 1
FCM 1
AIOPB1
AIOPA1
CUSTOM I/O 1
FCM 2
16 1 B ENGINE VIBE
15 GPS 2 A 2
14 2
13 A
12 1 B
11 A 2
10 1 B
9 A 2
1 B NIC 6 (B) (ID = 30)
1 B PROC 6
PROC 5 A 2
NIC 5 (A) (ID = 33) A 2
8 1 B
7 A 2
6 A 2
5
4 SPARE
3 SPARE
2 1 B
1 A 2
GENERIC I/O 3
#
AIOPB2
#
PSEM 2
CUSTOM I/O 2
FCM 3
B
U
S
B
U
S
C
H
Power Supply 2
DC 2
C
H
B
U
S
FCM 4
C
H
Power Supply 1
ESS 2
C
H
B
U
S
MAU 1 MAU 3
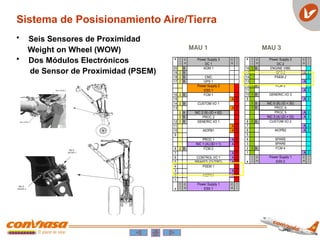
• Seis Sensores de Proximidad
Weight on Wheel (WOW)
• Dos Módulos Electrónicos
de Sensor de Proximidad (PSEM)
Sistema de Posisionamiento Aire/Tierra
216.
• Amortiguador tipoTelescopio
• Folding side stay
• Locking stay
• Down lock spring
• Release actuator
• Retraction actuator
• Up lock
• Compuertas
• Sensores de Proximidad
Tren de Aterrizaje Principal
217.
• Amortiguador tipoTelescopio
• Folding drag brace
• Locking stay
• Down lock springs
• Release actuator
• Retraction actuator
• Up lock
• Compuertas
• Sensores de Proximidad
Tren de Aterrrizaje de Nariz
218.
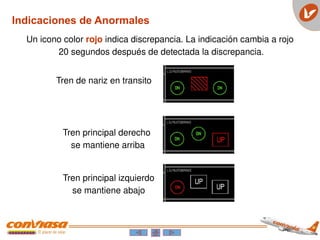
Indicaciones Normales delTren de Aterrizaje
Tren retractado y asegurado Tren en transición
Tren extendido y asegurado
219.
Tren de Aterrizaje
DOWN/UPLOCK SENSORS
Cada tren de aterrizaje tiene 2 sensores uplock y dos sensores downlock.
En caso de discrepancia entre ambos sensores uplock o downlock en el mismo
tren, el sensor en concordancia con la posición de la palanca de tren de
aterrizaje será considerada valida.
RETRACCIÓN
Al posicionar la palanca en la posición UP, se activa la retracción del tren de aterrizaje.
Los seguros (locks) del tren principal y nariz son liberados por medio de presión hidráulica y
presuriza los actuadores respectivos para retraer el tren.
Durante la retracción se lleva a cabo un frenado automático de las ruedas.
Cuando se completa la retracción, el tren es mantenido en esa posición por los seguros
uplock
y las puertas se cierran.
Los sensores de proximidad de los seguros uplock envían la señal al PSEM.
220.
Tren de Aterrizaje
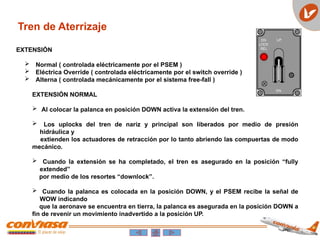
EXTENSIÓN
Normal ( controlada eléctricamente por el PSEM )
Eléctrica Override ( controlada eléctricamente por el switch override )
Alterna ( controlada mecánicamente por el sistema free-fall )
EXTENSIÓN NORMAL
Al colocar la palanca en posición DOWN activa la extensión del tren.
Los uplocks del tren de nariz y principal son liberados por medio de presión
hidráulica y
extienden los actuadores de retracción por lo tanto abriendo las compuertas de modo
mecánico.
Cuando la extensión se ha completado, el tren es asegurado en la posición “fully
extended”
por medio de los resortes “downlock”.
Cuando la palanca es colocada en la posición DOWN, y el PSEM recibe la señal de
WOW indicando
que la aeronave se encuentra en tierra, la palanca es asegurada en la posición DOWN a
fin de revenir un movimiento inadvertido a la posición UP.
221.
Tren de Aterrizaje
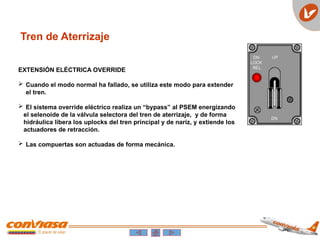
EXTENSIÓNELÉCTRICA OVERRIDE
Cuando el modo normal ha fallado, se utiliza este modo para extender
el tren.
El sistema override eléctrico realiza un “bypass” al PSEM energizando
el selenoide de la válvula selectora del tren de aterrizaje, y de forma
hidráulica libera los uplocks del tren principal y de nariz, y extiende los
actuadores de retracción.
Las compuertas son actuadas de forma mecánica.
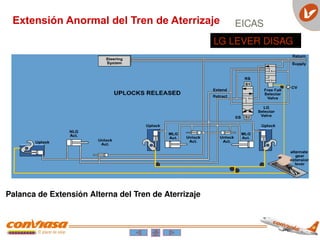
222.
Tren de Aterrizaje
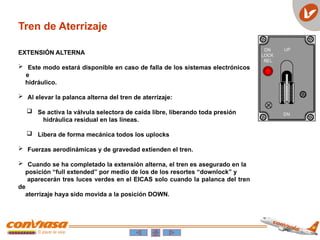
EXTENSIÓNALTERNA
Este modo estará disponible en caso de falla de los sistemas electrónicos
e
hidráulico.
Al elevar la palanca alterna del tren de aterrizaje:
Se activa la válvula selectora de caída libre, liberando toda presión
hidráulica residual en las líneas.
Libera de forma mecánica todos los uplocks
Fuerzas aerodinámicas y de gravedad extienden el tren.
Cuando se ha completado la extensión alterna, el tren es asegurado en la
posición “full extended” por medio de los de los resortes “downlock” y
aparecerán tres luces verdes en el EICAS solo cuando la palanca del tren
de
aterrizaje haya sido movida a la posición DOWN.
223.
Tren de narizen transito
Tren principal derecho
se mantiene arriba
Tren principal izquierdo
se mantiene abajo
Un icono color rojo indica discrepancia. La indicación cambia a rojo
20 segundos después de detectada la discrepancia.
Indicaciones de Anormales
• Palanca deflap en cualquier posición
– Radio altitud por debajo de 700 ft AGL y:
• Cualquier palanca de potencia por debajo de 45° con dos motores
operando, o
• Palanca de potencia por debajo de 57° con un solo motor
• Palanca de flap en posición de aterrizaje (5 o FULL)
– Independiente de posición de la(s) palancas
de potencia
La alarma puede ser inhibida en caso de falla
doble de radio altímetro y flaps seleccionados
en posición diferente de 5 o Full, y palancas
de potencia debajo de 38 grados para dos
motores operando, o 57 grados para un motor
inoperativo.
Alerta Audible del Tren de Aterrizaje
Frenado
• Brake-by-wire
– 3discos rotadores
– Indicadores de desgaste de freno
• Sistemas Hidráulico (1 outboard / 2
inboard)
• Freno de Emergencia/Parqueo
• El Sistema incluye
– Protección Locked Wheel (33%
+30kts.)
– Protección Antiskid (-10 Kts)
– Frenado Automático
– Protección Touchdown (3 Seg o 50
Kts)
– Fusible plugs
– Breake Wear Pins
230.
Protección Locked Wheel
Laprotección Locked Wheel previene el reventado de las ruedas del tren de
aterrizaje principal debido al bloqueo de giro de una rueda.
La lógica del sistema compara las señales de velocidad de giro entre los
frenos internos izquierdo y derecho, o entre los frenos externos izquierdo
y derecho. Si el sistema censa que la velocidad de una rueda es 33% o
menor que la velocidad de su pareja comparada, el modulo de control de
frenado detecta una condición de rueda bloqueada (locked wheel) y
comanda a cero la presión de frenado de la rueda mas lenta, permitiendo
igualar ambas velocidades.
Cuando la velocidad de la rueda mas rápida es menor a 30 nudos, la
protección locked wheel se desactiva.
La tolerancia de 33% de velocidad entre las ruedas es dada para permitir
frenado diferencial con propósitos de steering.
231.
Protección Antiskid
La protecciónAntiskid previene el resbalamiento de la rueda y
maximiza la eficiencia del frenado de acuerdo a la superficie de la
pista.
El sistema controla la cantidad de presión hidráulica aplicada a los
frenos y, si es necesario, reduce la presión de freno de la rueda a
fin de recobrar la velocidad de la rueda y prevenir el resbalado de
la rueda.
La protección Antiskid no esta disponible para el sistema de freno
de emergencia/parqueo.
232.
El frenado automáticopreviene que el tren de aterrizaje
principal se retracte con las ruedas girando.
Un dispositivo dedicado dentro de la bahía del tren de
nariz detiene el giro de las ruedas.
Frenado Automático
233.
La protección Touchdownpreviene que la
aeronave haga contacto con la superficie durante
el aterrizaje con los frenos de las ruedas del tren
principal aplicados y se desactiva 3 segundos
después de que el dispositivo WOW ha censado
que la aeronave se encuentra en tierra o cuando la
velocidad de las ruedas esta por encima de 50 kts.
Protección Touchdown
ALERTA
No despegar conlos
indicadores de temperatura de
frenos en ámbar.
MFD Status Page
Indicación de Frenos
236.
EICAS
BRK OVERHEAT
EAP 13-4
MFDStatus Page
Indicación de Frenos
ALERTA
No despegar con los
indicadores de temperatura de
frenos en ámbar.
237.
16 2 BBRAKES (INBD)
15 2 B CONTROL I/O 2
14 2 B
13
12 SPARE
11 SPARE
10 2 B
9 A 1
2 B NIC 4 (B) (ID = 61)
2 B PROC 4
PROC 3 A 1
NIC 3 (A) (ID = 29) A 1
8 SPARE
7 2 B DATABASE
6 AUTOBRAKE A 1
5 2 B EGPWM
4 A 1
3
2 A 1
1 A
Power Supply 1
DC 2
C
H
B
U
S
Power Supply 2
ESS 2/DC 2
GENERIC I/O 2
#
B
U
S
C
H
B
U
S
# C
H
B
U
S
C
H
NOSEWHEEL
STEERING
AGM 2
AIOPA2
Steering
• Steer-by-wire
– LRM MAU 2
– DC BUS 2
• Hydraulic System 2
• Rudder Pedals
– (+/-7°)
• Steering Handwheel
– (+/-76°, non linear)
– (speed dependant)
• Free Wheel Steering Mode
238.
Steering
• Steer-by-wire
– LRMMAU 2
– DC BUS 2
• Sistema Hidráulico 2
• Rudder Pedals
– (+/-7°)
• Steering Handwheel
– (+/-76°, non linear)
– (speed dependant)
• Free Wheel Steering Mode
239.
2
2
1
Steering
• Steer-by-wire
– LRMMAU 2
– DC BUS 2
• Hydraulic System 2
• Pedales de Rudder
– (+/-7°)
• Steering Handwheel
– (+/-76°, no linear)
– (dependiendo la velocidad)
• Free Wheel Steering Mode
240.
Vista posterior del
controlde mando
Steering
• Steer-by-wire
– LRM MAU 2
– DC BUS 2
• Hydraulic System 2
• Rudder Pedals
– (+/-7°)
• Steering Handwheel
– (+/-76°, non linear)
– (speed dependant)
• Modo Free Wheel Steering
(Air/grnd syst. fail/angulo+76º/steering syst. fail)
241.
Luces de Remolque
•ROJO: Remolque no permitido
• VERDE: Remolque permitido
• Remolque permitido cuando:
– Steering desconectado
– Parking brakes no aplicados
– Frenos principales no
aplicados
VELOCIDADES
LANDING GEAR OPERATION/EXTENDEDSPEED (VLO AND VLE)
VLO for retraction........................................................... 235 KIAS
VLO for extension ......................................................... 265 KIAS
VLE ................................................................................. 265 KIAS
NOTA: - VLO es la máxima velocidad a la cual el tren de aterrizaje puede ser
extendido y retractado de forma segura.
- VLE es la máxima velocidad a la cual la aeronave puede ser volada
de forma segura con el tren de aterrizaje extendido y asegurado
MAXIMUM TIRE GROUND SPEED
Maximum Tire Ground Speed .............................. 225 mph / 195 Kts
Limitaciones
Introducción
El Sistema deControles de Vuelo esta conformado por
controles de vuelo primarios, controles de vuelo
secundarios y los componentes de sistemas asociados.
Los alerones son actuados a través de
cables convencionales.
Todos los otros controles de vuelo
utilizan tecnología Fly-by-Wire (FBW).
247.
Primary Actuator ControlElectronics Hydraulic Actuators /
Power Control Units
CAN BUS- Controller
Area Network Bus
Flight Control Module
ASCB - Avionics Standard Communication Bus
ADA-Air Data Application/ Smart Probes
PSEM-Proximity Sensor Electronic Module
BCM-Brake Control Module
AFCS-Automatic Flight Control System
CMC-Central maintenance Computer
El Primary Actuator
Control Electronics
(P-ACE) y/o el Flight
Control Modules
(FCM) son utilizados
para operar el
respectivo actuador
electro-hidráulico o
electro-mecánico.
Elevadores, rudders y
roll spoilers así como
todos los sistemas
secundarios de control
de vuelo, incluyendo el
horizontal stabilizer,
flaps y slats, ground
spoilers y speed brakes,
son controlados
electrónicamente
utilizando tecnología
Fly-by-Wire (FBW).
El primary flight control electronics esta formado por :
• The Primary Actuator Control Electronics (P-ACE).
• The Flight Control Module (FCM).
Fly-by-Wire
248.
• El SistemaFBW del EMBRAER 190 esta compuesto por un set de seis Actuator Control Electronics (ACEs) y
cuatro Flight Control Modules (FCMs):
– Dos Primary-ACEs (P-ACE) instalados en el forward electronics bay.
– DOS Slat/Flap ACEs (SF-ACE) instalados en el middle electronics bay.
– Un Horizontal Stabilizer ACE (HS-ACE) y Un P-ACE instalados en el aft electronics bay.
– FCM 1 y 2 están localizados en el Modular Avionics Units # 1 (MAU 1).
– FCM 3 y 4 están localizados en el Modular Avionics Unit # 3 (MAU 3).
• Las tres unidades P-ACE conectan la columna de control directamente a la respectiva superficie de control
proporcionando control análogo directo del actuador de superficie del rudder y el elevador .
• Las dos unidades SF-ACE controlan los slat y flaps, y la unidad HS-ACE controla el estabilizador horizontal.
• Las unidades FCM están conectadas al P-ACE vía el Controller Area Network Bus (CAN BUS),
proporcionando inputs digitales al P-ACE, los cuales son combinados con los inputs del piloto.
• Esto es utilizado para acrecentar los inputs del piloto para las diferentes velocidades, y provee otras
funciones de alto nivel tales como limitación del Angle-of-attack (AOA) a la unidades P-ACE.
Fly-by-Wire
249.
2
0
B
1
9
2 B
1
8
2 B
1
7
2B
1
6
2 B
1
5
A 1
1
4
2 B
1
3
A 1
2 B NIC 2 (B) (ID = 62)
2 B PROC 2
1
2
2 B
11 A 1
1
0
A 1
9
PROC 1 A 1
NIC 1 (A) (ID = 1) A 1
8 2 B
7 A 1
6 A 1
5 A 1
4
3 A 1
2 A 1
1
#
C
H
B
U
S
# B
U
S
B
U
S
C
H
Power Supply 3
DC 1
C
H
Power Supply 2
ESS 1
B
U
S
C
H
Power Supply 1
ESS 1
FCM 1
FCM 2
FCM 2
MAU1
FCM 1
16 1 B
15 A 2
14 2
13 A
12 1 B
11 A 2
10 1 B
9 A 2
1 B NIC 6 (B) (ID = 30)
1 B PROC 6
PROC 5 A 2
NIC 5 (A) (ID = 33) A 2
8 1 B
7 A 2
6 A 2
5
4
3
2 1 B
1 A 2
#
#
FCM 3
B
U
S
B
U
S
C
H
Power Supply 2
DC 2
C
H
B
U
S
FCM 4
C
H
Power Supply 1
ESS 2
C
H
B
U
S
MAU3
FCM 4
FCM 3
Ubicación de los FCM en los MAU
250.
• El FlightControl Module (FCM) provee software en base a cambios de velocidad (airspeed gain schedules) y
control de limite a los P-ACE, así como funciones de alto nivel, tales como :
- Elevator control laws scheduling with airspeed.
- Auto-thrust compensation with elevator.
- Angle-of-Attack (AOA) limiting with elevator offset.
- Rudder airspeed gain scheduling and stroke limiting.
- Yaw damper and turn coordination via AFCS.
- Rudder ground/lift authority change.
- Roll spoiler scheduling with airspeed and speedbrake deployment.
- Configuration change compensation with Horizontal Stabilizer.
- Mach Trim as a function of Mach number.
- Configuration change compensation with Horizontal Stabilizer due to landing gear, flap/slat and speed
brakes actuation.
Modo Normal
251.
Modo Directo
• ElFCM es removido del loop de control (por ejemplo, debido a perdida de información de velocidad) y los
valores de limitación de control se revierten a los establecidos por default en el P-ACE.
En el caso de pérdida de información de velocidad, el FCM es removido del loop de control y el P-ACE
asociado se revierte a MODO DIRECTO. Las funciones del FCM, tales como compensador de elevador por
cambio de potencia y el limitador de AOA ya no están disponibles.
• La operación en Modo Directo es primordialmente el resultado de la pérdida de información (DATA)
proveniente de todos los FCMs (no aportación de información de velocidad) o múltiples fallas en ambos
ACEs.
La operación es auto-revertida (defaulted) a una configuración de normas de control fijo (fixed control laws)
Los comandos de control aplicados por el piloto son trasladados de forma directa a las superficies de
control.
El cambio o selección de Modo es de forma automática cuando la falla de un canal es detectada, o manual a
través del switch “Mode Select” en el Flight Control Panel.
252.
ACTIVE P-ACE
DIRECT
NORMAL
STANDBY P-ACE
NORMALDIRECT
MODOS : NORMAL - DIRECTO
El Piloto siempre mantiene autoridad suprema en el
control de la aeronave ya que los FCMs no pueden
sobrepasar/invalidar un comando del piloto.
El switch “Mode Select” cambia del Normal
Channel del P-ACE activo al Direct Channel
del P-ACE standby y continua de la siguiente
manera:
MODOS : NORMAL- DIRECTO
RUDDER NML MODE FAIL
ELEV NML MODE FAIL
SPOILER NML MODE FAIL
RUDDER FAULT
ELEVATOR FAULT
SPOILER FAULT
FLT CTRL NO DISPATCH
El presionado de cualquier switch en el
panel activara este mensaje.
Un mensaje indica al piloto
que seleccione MODO DIRECTO
Un mensaje indica al piloto que
el sistema se ha revertido automáticamente
a MODO DIRECTO. (Esta situación puede
ser revertida reciclando el switch respectivo
en panel FLIGHT CONTROL MODE).
CAUTION
WARNING
258.
POWER UP BUILTIN TEST (PBIT)
• Con el propósito de reducir fallas latentes en el sistema de controles de vuelo, un Power Up
Built in Test (PBIT) es realizado para asegurar que los componentes del sistema de controles
de vuelo se encuentran en condiciones de realizar sus funciones.
• El PBIT provee detección de condiciones fuera de tolerancia y fallas en los FCM’s, P-ACEs y
actuadores.
• El PBIT es aplicado de forma automática al sistema de controles de vuelo durante la
energización eléctrica de la aeronave.
• El PBIT es realizado sin aplicación de fuerza hidráulica, ya que por razones de seguridad el
movimiento de las superficies del sistema de controles de vuelo no es deseable cuando el
PBIT se esta llevando acabo.
• Después de 50 horas (tiempo transcurrido) desde el último PBIT, expira su vigencia y el
mensaje en el campo de mensajes CAUTION en el EICAS
aparecerá cuando la aeronave se encuentre en tierra durante la fase K1 (antes del encendido
del primer motor) y permanecerá iluminado hasta que se realice la acción correctiva.
FLT CTRL BIT EXPIRED
Control de Cabeceo(Pitch Control)
El control de Cabeceo (Pitch) es a
través de elevadores comandados
electro-mecánicamente y el
estabilizador horizontal electro-
mecánico.
• Elevador
– FBW
– Feel Units
– High Level Functions:-
• Gain Scheduling
• ETC
• AOA Limiting
ETC-Elevator Thrust Compensation
Disconnect Mechanism
263.
Compensador de Cabeceo(Pitch Trim)
• Pitch Trim:
Estabilizador Horizontal
• Operación:
Trim Manual
Limite de 3 segundos
(Para evitar una posible condición de
pitch trim runaway)
Switches Separados (Split Switches)
(Si solo una mitad del switch es
accionado por mas de 7 segundos,
este switch es desactivado
automáticamente)
Trim del Piloto Automatico (Auto Pilot
Trim - FCM)
• Prioridad
Backup
Pilot
Co-Pilot
Auto-trim
En caso de activación del
stick shaker, el HS-ACE es
impedido de responder a
cualquier comando de pitch-
trim generado por el AFCS
debido a una señal de stick
shaker.
264.
Compensador de Cabeceo(Pitch Trim)
Activación:
• HS-ACE
Twin Channel Active/Standby
• Eléctrica servo motors (HSA)
Emergencia Eléctrica -
(channel 2 a 50% de regimen)
Loss of FCM-
(régimen a 50 % / half rate)
En caso de un emergencia eléctrica,
únicamente el canal 2 del HS-ACE estará
operativo a un régimen bajo. Una pérdida
de información de velocidad por parte del
FCM también dará como resultado una
operación a bajo régimen del
estabilizador horizontal, proporcionando
una protección estructural de la
superficie.
265.
Compensador de Cabeceodel Piloto Automático/Auto Pilot Trim (FCM)
• El piloto automático puede en forma directa accionar el motor eléctrico de compensación
cuando el piloto automático se encuentra activado.
• Si la función de compensación del piloto automático se encuentra inoperativa, el piloto
automático no podrá ser activado.
• Si la función se pierde durante la operación del piloto automático, el piloto automático se
desactivará.
• La función de compensación del piloto automático estará activa únicamente si:
El piloto automático se encuentra activado (engaged).
La configuración de compensación se encuentra operacional.
Compensación eléctrica manual no esta activada.
NOTA: En caso de una falla eléctrica, seguida por el despliegue del RAT, la función de
compensación trabajará a 50% del régimen de velocidad, ya sea en compensación
manual o del piloto automático. Pero si funciona.
266.
Pitch UP
Pitch DOWN
PitchTrim
para
despegue
Pitch Trim
fuera de la
banda verde
de despegue
Indicaciones de Compensador de Cabeceo / Pitch Trim Indications
267.
Fallas en elControl de Pitch / Pitch Control Malfunctions
Jammed Control Column
268.
ELEV NML MODEFAIL
Fallas en el Control de Pitch / Pitch Control Malfunctions
Sistema de Controlde Rudder / Rudder Control System
El Sistema de Control de Rudder es operado por :
El Piloto,
El Piloto-Automático, o
Las Funciones de Alto-Nivel del FCM (FCM high-level functions).
Dos actuadores, o PCUs, comandados eléctricamente e hidráulicamente movidos, están
conectados a la superficies de control del rudder, recibiendo señales del Sistema Fly-by-Wire
(FBW) de Control de Rudder.
Tanto el actuador superior como el inferior pueden controlar la superficie del rudder:
El Capitán comanda solo el actuador superior.
El Primer Oficial comanda solo el actuador inferior.
Las unidades FCM son las que proveen el valor de aumento de sistema de alto nivel a los
P-ACEs, tales como :
Coordinación de viraje
Regulador de movimiento como función de velocidad
Los actuadores del rudder operan en configuración active/standby
Los sistemas hidráulicos responsables de accionar los actuadores son;
Sistema Hidráulico 1: Actuador o PCU superior
Sistema Hidráulico 3: Actuador o PCU inferior
272.
Sistema de Controlde Rudder / Rudder Control System
En Modo Normal, los FCMs adicionan funciones de alto nivel a las aplicaciones de pedal del
piloto.
Con incremento de velocidad, el FCM reduce el desplazamiento del rudder como
compensación al incremento de efectividad del rudder por la velocidad, y también proveer
una protección estructural de la superficie del rudder.
Un botón dedicado en el panel de Flight Control Mode provee la capacidad al piloto de
realizar un reset del sistema de rudder a MODO NORMAL en caso que el sistema se haya
transferido por default a MODO DIRECTO, o para transferir de manera manual el sistema a
MODO DIRECTO.
En caso de un atascamiento en el ensamblaje de pedales de rudder del Capitán, el rudder se
mantiene activo y será actuado por medio de funciones de alto nivel (high-level functions)
tales como yaw damping and turn coordination.
En caso de atascamiento de un actuador PCU, el rudder será hidráulicamente asegurado
(entrampado) en la presente posición. El control de la aeronave será realizado a través de
los alerones y los roll spoilers.
La activación de la función de compensador del rudder (rudder trim ) esta limitada a tres
segundos. Si es necesario un mayor desplazamiento del compensador, el comando debe ser
interrumpido y vuelto a aplicar.
273.
Control de Guiñada/ Yaw Control
• Rudder
– PCU (activo-standby)
– Feel Unit
– FCM
– Trim
Control de RotaciónHorizontal / Roll Control
• El control de los alerones es realizado a través de un sistema de cables
convencionales, el cual transmite las aplicaciones en la columna de
mando realizadas por el piloto a dos actuadores hidro-mecánicos en
cada alerón.
• El Sistema Hidráulico responsable de operar los actuadores:
Sistema Hidráulico 2: PCUs internos izquierdo y derecho
Sistema Hidráulico 3: PCUs externos izquierdo y derecho
278.
• El sistemade control del alerón del Capitán y Copiloto están conectados a través de un
mecanismo de desconexión. En caso de atascamiento, el mecanismo de desconexión puede
ser actuado por el piloto utilizando la palanca de desconexión en la cabina de mando.
Posterior a una desconexión, la mitad (50%) del sistema permanece operacional :
Si el atascamiento ocurre en la mitad del sistema correspondiente al Copiloto, el
Capitán retiene control del alerón izquierdo con sensación artificial normal.
Si el atascamiento ocurre en la mitad del sistema correspondiente al Capitán, el
Copiloto mantiene comando del aleron derecho sin sensación artificial y
compensador de rotación (roll trim) ya que el mecanismo de sensación se
encuentra incorporado en la mitad del sistema correspondiente al Capitán.
Solamente un par de multifunction spoilers permanecerán disponible después de la
desconexión.
Posterior a una desconexión, el sistema se mantiene separado por el resto del
vuelo.
En caso de desprendimiento de un PCU de alerón de la superficie de control o la
estructura del ala, el otro PCU prendido a la superficie operará de forma normal,
pero la fuerza de autoridad será reducida en 50%.
Control de Rotación Horizontal / Roll Control
279.
Sistema de ControlMultifunction Spoiler /
Multifunction Spoiler Control System
• El Sistema de Control Multifunction Spoiler está compuesto de 6 paneles
numerados de adentro hacia fuera de la siguiente manera:
L3, L4, L5 (ala izquierda), y
R3, R4, R5 (ala derecha).
• La función de rotación del spoiler maneja de forma asimétrica el despliegue de
los 6 paneles multifunction en función de la posición de la columna de mando.
• A medida que la velocidad incrementa, la deflexión de los spoilers requerida va
siendo menor y el sistema de spoilers limitará el despliegue de las superficies
para control de rotación (roll control).
280.
• En casode un atascamiento:
La columna de mando y el alerón correspondiente a la mitad del sistema
atascado quedaran fijos en la presente posición.
La otra mitad del sistema puede ser separada del lado atascado accionando
la palanca de desconexión localizada en la cabina de mando.
El Capitán controla los spoilers externos.
El Copiloto controla los spoilers medios.
NOTA: Con una desconexión debido a atascamiento, los spoilers internos son
desactivados.
Sistema de Control Multifunction Spoiler /
Multifunction Spoiler Control System
281.
Compensador de Roll/ Roll Trim
• El sistema de control del alerón es compensado de forma manual
utilizando el switch de compensación (roll trim switch) en el panel de
control de compensación (trim control panel), ubicado en el pedestal de
control en la cabina de mando.
• El actuador tiene incorporado un cronometro (timer), el cual limita a tres
segundos cada comando aplicado.
• Un switch de desconexión rápida, ubicado en la columna de mando,
deshabilita el actuador de compensación de roll (roll trim)
interrumpiendo la corriente DC al motor de compensación, durante todo
el tiempo que el switch se mantenga presionado.
282.
Control de Roll
•Alerón
– Cable
– PCU (activo-activo)
– Feel Unit (lado izquierdo)
– Trim
Indica que elalerón izquierdo (derecho)
no esta disponible, o ha habido
una desconexión mecánica
de la superficie de alerón
izquierda (derecha).
Aileron LH(RH) FAIL
Fallas en Control de Roll / Roll Control Malfunctions
286.
SPOILER NML MODEFAIL
Fallas en Control de Roll / Roll Control Malfunctions
287.
Speed Brake
FBW
Paneles 3,4 & 5 (30º)
(No disponible en Modo Directo)
Speed Brake
288.
SPDBRK LEVER DISAG
RetracciónAutomática cuando:
Flap/Slat 2 , o
TLA >70 degrees
- 180 KIAS
En Modo Directo, los speed brakes no están disponibles.
Speed Brake
289.
• Ground SpoilersAutomáticos
FBW
Todos los Paneles
(no esta disponible en Modo Directo)
• Despliegue Automático cuando:
Peso sobre las ruedas (Weight on wheels)
Velocidad de ruedas >45kts o Velocidad de Aeronave >60kts
TLA < 26 grados
• Retracción Automática cuando:
Velocidad de ruedas < 45kts, o
TLA > 35 grados
Ground Spoilers
290.
• Cada SF-ACEes una unidad de doble canal, con un canal para control de flap y un canal para control de slat.
• La palanca de control de slap/flap tiene siete posiciones. El desplazamiento de los Slat y Flap se realiza en
una secuencia de manera que los Slat se extienden primero, y los Flap se retraen primero cuando se
comanda una posición que requiere que ambas superficies se desplacen.
• El Sistema utiliza energía eléctrica para mover las superficies.
• Sensores electrónicos de sesgado detectan la desconexión de un actuador mientras el actuador remanente
en el mismo panel continua operando. Si el diferencial de movimiento de un panel excede los limites
aceptables, el SF-ACE desconectará el Sistema de Slat/Flap , y el mensaje correspondiente aparecerá en el
EICAS.
• La falla de un solo canal en el SF-ACE, o la falla de un motor dentro del PDU resultará en un régimen bajo de
velocidad operacional del sistema de slat/flap.
• En caso de doble falla de canal en el sistema de control de slat o flap, el sistema no estará mas disponible.
• Cuando el Ram Air Turbine (RAT) es la única fuente de energía eléctrica, el canal de flap y slat energizado
por el AC BUS 1 y 2 no reciben ninguna energía eléctrica, ya que solamente el AC ESS BUS es energizado.
Esto resulta en una reducción de 50% en velocidad de operación del sistema.
• Adicionalmente, cuando el RAT es la única fuente de energía eléctrica, el SF-ACE restringe el
desplazamiento de los slat y flap mas allá de la posición TRES a fin de asegurar una velocidad adecuada
para el RAT.
Sistema Slat / Flap
El Sistema proveeoxígeno para la Tripulación y Pasajeros.
• El Sistema de Oxígeno esta compuesto por:
Sistema de oxígeno para la tripulación
Sistema de oxígeno para los pasajeros
Protective breathing equipment (PBE)
Botellas portátiles de oxígeno
Introducción
299.
• Sistema aalta presión
• La botella se encuentra instalada el compartimiento de
carga delantero
• Indicador de descargado
Sistema de Oxígeno para la Tripulación
300.
CREW OXY LOWPRESS
OBSERVER OXY LOW PRESS
Por lo menos 120 min (50cu ft)
Indicación de la presión de oxígeno en la pagina status en
el MFD
Sistema de Oxígeno para la Tripulación
301.
• Caja dealmacenamiento de mascara
- Test/Reset
• Full face quick donning mask
– Harness inflation
– Microphone
– Supply control knob
EMERG: Provee oxigeno puro a presión positiva.
100%: Provee oxigeno puro a toda altitud de cabina.
NORM: Provee una mezcla de oxigeno/aire en demanda.
Sistema de Oxígeno para la Tripulación
302.
• Provee oxígenopor 20min
• Protector visual (fuego, humo,
gases)
• Cuatro a bordo
Protective Breathing Equipment
303.
Sistema de Oxígenopara Pasajeros
• Generadores de Oxígeno de 22 min.
– Passenger Service Units
– Flight attendant station
– Lavatories
– Galleys
304.
Sistema de Oxígenopara Pasajeros
• Despliegue automático a 14‘500ft de
altitud
de cabina (14,000 ft. – 14,750 ft.)
• Control manual desde la cabina de mando
305.
Sistema de Oxígenopara Pasajeros
• Despliegue automático a 14‘500ft de
altitud
de cabina (14,000 ft. – 14,750 ft.)
• Control manual desde la cabina de mando
CABIN ALTITUDE HI
306.
Sistema de Oxígenopara Pasajeros
• Despliegue automático a 14.500ft de altitud
de cabina (14.000 ft. – 14.750 ft.)
• Control manual desde la cabina de mando
CABIN ALTITUDE HI
307.
• Dos Botellas
•1200psi min para despacho
• Uso máximo 30min
Botella Portátil de Oxígeno
Introducción
El Sistema deAdministración de Aires (AMS) se compone de:
Pneumatic System
Environmental Control System (ECS)
Un controlador del AMS conectada al SPDA 2 provee control primario de varios sub-
sistemas de la aeronave tales como :
• Control de Aire (bleed control)
• Aire Acondicionado (environmental control system – ECS)
• Detección de fuga de aire caliente (hot air leak detection)
• Monitoreo de Oxígeno para la Tripulación (crew oxygen monitoring)
• Protección Anti-ice de Motor y Ala (wing and Engine ice protection)
311.
El Sistema deAdministración de
Aires (AMS) tiene dos canales:
En caso de falla de uno de los canales el otro es capaz de asumir el control
completo de los sistemas tales como :
• Neumático
• Aire Acondicionado
• Anti-ice
La fuentes deaire sangrado
Fuentes neumaticas externas
315.
Sistema Neumático
Sistemade Aire Acondicionado (ECS)
Encendido de Motor
Protección Anti-ice de Motor y Alas
Presurización de Sistema de Agua
316.
Sistema de EngineBleed
• Extracción de aire es
tomada de LP 5ª Etapa y
HP 9ª Etapa. (AOM)
• Combinación de baja/alta
presión a fin de mantener
45psig
• Pre-enfriamiento
• Controles
• Pagina Sinóptica
(MFD)
317.
Automatización de EngineBleed
La lógica del AMS provee control automático del Engine Bleed:
La válvula de engine bleed se abre cuando:
• Switch respectivo (bleed switch) en AUTO
• Engine bleed air disponible
• No existe detección de fuego en el motor respectivo
• No existe detección de fuga de aire en los ductos
318.
APU Bleed
• Capacidadproveer constante
Aire bleed (Tierra/Aire)
• Principal uso ECS y start Eng
• Aire Acondicionado
- Hasta 15,000 ft
• Asistir Encendido de Motor
(tierra o vuelo)
- Hasta 21,000 ft
• Controles Push IN/OUT
(FADEC)
• Pagina Sipnotica (MFD)
319.
Automatización de Bleeddel APU
La lógica del AMS provee control automático del APU Bleed:
La válvula de bleed del APU se abre cuando SIMULTANEAMENTE:
• Switch de APU bleed en AUTO
• APU bleed air disponible
• No existe detección de fuga de aire en los ductos del APU e izquierdo
• Engine bleed del motor izquierdo no está disponible o no tiene prioridad
• Sistema Anti-ice no requerido
320.
Automatización de Bleeddel APU
Cuando existe disponibilidad de bleed del APU y de los motores, el bleed del
APU tendrá prioridad cuando SIMULTANEAMENTE:
• La aeronave se encuentra en tierra
• Bleed de motor por debajo del mínimo para encendido del otro motor
• Ground speed < 50kts
• Altitud por debajo de 15000 Ft
• APU bleed esta disponible
• Operación normal de la válvula Cross-bleed
321.
Conexión de PlantaPneumática Externa
• Alta presión (HP)
- 45psig
• Arranque de motores
(Engine Ground Pneumatic
Start)
• No existen controles
322.
Conexión de PlantaNeumática Externa
• Baja Presión
• Aire Acondicionado
• No existen controles
Automatización de VálvulaCross-Bleed
La válvula cross bleed es comandada a posición abierta cuando el boton XBLEED es
apretado (AUTO) y cualquiera de las siguientes condiciones sean dadas:
• Un lado del sistema provee presión en el ducto (manifold pressure) y no existe una
fuente que provea bleed air en el lado opuesto.
• El botón APU Bleed es presionado hacia afuera para arranque primario de motor.
• Arranque de motor #2 en vuelo
• Bleed del APU apagado (OFF) para arranque de motor #1 start en vuelo.
• No se detecta fuga de aire (bleed leak), a menos se este arrancando un motor.
326.
Sistema de Deteccionde Sobrecalentamiento
(Overheat Detection System (ODS)
• El sistema de detección de sobrecalentamiento
utiliza doble línea de sensores de calor (dual
loop), y una condición de sobrecalentamiento es
indicada solamente cuando ambas líneas censan
la condición de sobrecalentamiento.
• Cuando una linea falla, la otra linea monitorea la
condición de sobrecalentamiento (single loop
operation).
• Un total de seis líneas distribuidas en seis zonas
son utilizadas para detectar una condición de
sobrecalentamiento.
327.
• AMS cierrael sistema
Bleed
• Envía un Mensaje EICAS
• Ilumina Barra Ambar
329.
Sistema de AireAcondicionado /
Environmental Control System (ECS)
330.
Sistema de AireAcondicionado /
Environmental Control System (ECS)
331.
Sistema de AireAcondicionado /
Environmental Control System (ECS)
• Aire Acondicionado (2 pack)
- Single pack 31,000ft ojo
• Recirculación del Aire (52% fresh air ;
48% recirculation air)
• Detector de humo
• Gasper ventilation
332.
Adecuador de Aire(Trim Air)
Hot Air
Injectors
Trim Air
Valves
El sistema de adecuación
de aire controla la cantidad
de aire caliente que va del
Pack 2 al mezclador para el
control independiente de la
temperatura en las zonas
delantera y trasera de la
cabina de pasajeros.
333.
Ventilación de losCompatimientos Electrónicos
• Forward electronic bay
• Mid electronic bay
• Aft Electronic bay
• Fwd Cargo bay ventilation
334.
Automatización del Sistemade Administración de Aire
En caso de indicación de humo por un detector en la bahía de recirculación
ocasionará:
- Apagado automático de ambos ventiladores de recirculación.
- Apagará automáticamente el ventilador del compartimiento delantero de
carga y cerrara la válvula de salida de aire respectiva (out flow valve)
335.
Ventilación de Emergencia
(EmergencyRam Air Ventilation)
• Válvula de ventilación de emergencia
comandada abierta (Emergency ram
air valve open) cuando:
- Falla o apagado de ambos Pack
- Altitud < 25’000ft
• Válvula de chequeo de ventilación
de emergencia (Emergency ram air
check valve):
- Ram air pressure >Cabin pressure
336.
Automatización del Sistemade Administración de Aire
Los pack del ECS se cerraran en cualquiera de las siguientes condiciones:
No existe fuente de aire disponible
El botón del pack en apagado
Durante el arranque de cualquier motor en tierra
El motor respectivo (onside engine) esta arrancando en vuelo
y el motor opuesto no esta en proceso de arrancado
Durante el arranque de cualquier motor y el APU es la fuente de aire
Fuga en el ducto del sistema de aire respectivo
Falla del Pack
ECS es seleccionado OFF en el MCDU
337.
Take Off DataSet
Los ECS packs se cerraran durante el despegue si
existe cualquiera de las siguientes condiciones:
TLA seleccionado a MAX
TDS REF A/I seleccionado en ALL
TDS REF ECS seleccionado OFF
(APU bleed no disponible )
Los ECS packs son recuperados cuando:
Reducción de TLA
500 pies sobre el terreno (ATOA)
9700 pies altitud (1 Eng Inop) en Aeropuerto a
8000 ft o por debajo
15000 pies altitud ( 1 Eng Inop) en Aeropuerto por
encima de 8000 ft
338.
Smoke detector comandaambos recirculation fan OFF cuando detecta humo en Recirculation BAY
FWR cargo comparment ( FAN OFF/shutoff valve closed
Sistema de Controlde Presurización de Cabina /
Cabin Pressure Control System (CPCS)
342.
Sistema de Presurización/
Cabin Pressure Control System
El Sistema de presurización
puede ser operado de modo
automático y manual.
343.
Componentes
• Cabin pressurecontroller (CPC)
• One cabin outflow valve (OFV)
• One negative pressure relief valve (NPRV) ( -0.5psi)
• One positive pressure relief valve (SV)(8.6psi)
• Static pressure port (positive pressure)
344.
Modos de Operacion
GroundMode
En tierra, la válvula outflow se ubicara en su posición de apertura total:
- Cuando la aeronave está en tierra pero no se encuentra en carrera de despegue.
- El modo GROUND es seleccionado cuando el tren de aterrizaje está extendido y los motores no
se encuentran proporcionando potencia de despegue.
- La válvula outflow es seleccionada abierto total.
El valor de presión de cabina será 0.01 psi por debajo de la presión de cabina censada por el controlador de presión.
El régimen de ascenso de la cabina es +500 ft/min y –300 ft/min el régimen de descenso.
Takeoff Mode
En el modo de despegue el CPCS incrementa el diferencial de presión ocasionando una pre-presurización.
- Cuando la aeronave se encuentra en carrera de despegue.
- El modo TAKEOFF es seleccionado cuando el tren de aterrizaje esta extendido y los
motores están desarrollando potencia de despegue.
- La válvula outflow se cierra
El valor de presión de cabina será 0.15 psi por encima de la presión ambiente.
El régimen de ascenso de la cabina es +500 ft/min y –400 ft/min el régimen de descenso.
Climb Mode
El valor de presión de cabina es diferente para ascenso interno y externo.
345.
Climb Modes.
DIFF 4.2psid
FL410DIFF 8.4psid
FL370 DIFF 7.8psid
Climb External Mode.
Régimen de cabina de
acuerdo a peso de la
aeronave, nivel de crucero y
elevación de aeropuerto de
aterrizaje (LFE) a fin de
alcanzar el diferencial de
presión al alcanzar el nivel de
crucero.
Climb Internal Mode.
La presión de la cabina es
calculada por el FMS o
dependiendo de la presión
ambiente.
346.
Cruise Mode
Inicia cuandola aeronave alcanza el nivel de vuelo de crucero del
FMS (External) o cuando la aeronave para de ascender. (Internal).
Descent Mode
La presión a mantener durante el modo de descenso esta definida
en base a la elevación del aeropuerto de aterrizaje (LFE):
Abort Mode
En el modo de aborto, la presión de cabina es programada de
regreso a la altitud del aeropuerto de despegue en dirección
inversa.
El modo de aborto es posible únicamente si el modo de crucero no
ha sido activado y la aeronave se encuentra ya sea por debajo de
10,000 pies altitud absoluta, o aun por debajo de 5,000 pies
sobre el aeropuerto de despegue.
Modos de Operación
347.
Modos de Operación
NOTA:
Lacabina no se despresuriza de forma
automática en tierra después del
aterrizaje
• Manual
- Ambos canales del CPC
revertidos a manual.
- Un canal opera la
válvula
out flow.
PRESN AUTO FAIL
348.
Limitaciones
Maximum differential pressure:
Maximundifferential pressure…………..................... 8.4 psi
Maximum differential overpressure .......................... 8.8 psi
Maximum differential negative pressure................. - 0.5 psi
Maximum differential pressure for
Takeoff and Landing ……………………….………... 0.2 psi
El Sistema deProtección de Hielo y Lluvia comprende:
• Sistema Wing anti-ice
• Sistema Engine anti-ice
• Sistema Windshield heating
• Sistema Probe heating
• Sistema Windshield wiper
• Sistema Water and waste ice protection
Introducción
352.
ICE DETECTOR 1(2)FAIL
2 Detectores de Hielo (seccion de nariz)
Detección (no hielo + 5min)
Detectores de Hielo
353.
• Aire calientede la 9ª etapa.
• Sistemas independientes
• Automático / manual
Sistema Engine Anti-Ice
354.
• Aire sangrado(bleed air) a los externos 3 leading edge slats
• En caso de falla de fuente de air el XBLD se abre
• Automático / manual
Sistema Wing Anti-Ice
El Menu TODATASET en el MCDU debe
ser seleccionado en ENG cuando la SAT
se encuentra por debajo de 10°C con
humedad visible.
El menu TO DATASET en el MCDU debe
ser seleccionado en ALL cuando la SAT
se encuentra por debajo de 5°C con
humedad visible.
Operación de los Sistemas Engine y Wing Anti-Ice
• Anti-icing yanti-fogging
• Calentado eléctricamente
– Lógica Load shedding
(fuente de energía
eléctrica sencilla)
• Unidad de control de calentamiento
del Windshield
Sistema Windshield Heating
359.
Electrically heated
Fully automatic
AirData Smart Probe (ADSP)/TAT heating operation is fully
automatic.
A total of four smart and two TAT probes are installed on
the nose fuselage section of the airplane. Each probe has a
dedicated heater, which is powered whenever the engine is
running.
360.
• Calentado eléctrico
•Totalmente automático
La operación de calentamiento de los sensores de Air Data
y Temperatura (Air Data Smart Probe (ADSP)/TAT) son
totalmente de forma automática.
Un total de cuatro sensores smart y dos TAT se encuentran
instalados en la sección de fuselaje de nariz.
Cada sensor tiene un calentador dedicado, el cual es
energizado siempre cuando el motor esta encendido.
Sistema de Calentamiento de Sensores
361.
• Operación independiente
•Se para cuando el
windshield esta seco
• Operación 253kts Max.
Sistema Windshield Wiper
En Tierra: Con una sola fuente AC, el
sitema es inhibido
En Vuelo: Con una sola fuente AC, solo el
Windshield Izq, es Energizado y se
transfiere si falla el Windshield.
Low: 80 Ciclos x min. High 125
Flight Guidance ControlSystem (FGCS)
• Piloto Automático ( Auto Pilot – AP )
• Director de Vuelo ( Flight Director – FD )
• Yaw Damper /Turn Coordination (YD)
365.
Piloto Automático (AutoPilot – AP )
El Piloto Automático poseé
dos canales los cuales se
alternan de forma automática
por diseño de sistema o por
acción del piloto.
• El Piloto Automático proveé
control automático de cabeceo
(pitch) y viraje (roll) de la
aeronave a través de los servos
del Piloto Automático del
elevador y alerón.
366.
Activación del PilotoAutomático
• El Piloto Automático es activado
presionando el boton AP en el
Guidance Panel.
• Si el Yaw Damper estaba
desactivado,
este se activará con la activación del
Piloto Automático (AP)
367.
Desactivación del PilotoAutomático
El Piloto Automático se desactiva cuando:
El botón AP en el guidance panel es presionado.
Los switches de Trim Manual de Cabeceo (Manual Pitch Trim Switches) son
activados.
Cualquier switch de desconxión rápida del Piloto Automático son presionados.
Activación del vibrador de columna de mando (Column Shakers).
Reversión del sistema fly-by-wire de modo normal a modo directo.
Desconexión del sistema de control de alerón o elevador.
Activación del sensor de fuerza de la columna de control de mando (column
and control wheel force sensor).
Diversas fallas internas monitoreadas.
368.
AP
AP
AP
Alarmas de Desactivaciondel Piloto Automático
En cualquier momento que el Piloto Automático es desconectado una alarma
audible es activada y el Anunciador de Modo de Vuelo (Flight Mode
Annunciator – FMA) ilumina una indicacion AP intermitente .
AP
AP FAIL
Un mensaje aparece en el EICAS cuando el Piloto Automático
se ha desconectado de forma anormal.
369.
Director de Vuelo( Flight Director - FD )
• Símbolo color magenta desplegado
en
el PFD.
• Proporciona guía lateral y vertical.
• Activación:
Activación de AP
Con detección de windshear
Activación de botón TOGA
370.
El FD esliberado cuando el boton TCS
(Touch Control Steering) es presionado y
se reactiva resincronizando los parametros
(referencias) cuando se deja de presionar
el botón.
Seleccionando FD OFF en el Guidance
Panel (GP) remueve la informacion de FD
del lado no acoplado (non coupled side) en
caso el Piloto Automático esta conectado y
de cualquier lado en caso de que el Piloto
Automático se encuentra desconectado.
Director de Vuelo ( Flight Director - FD )
371.
Flight Path Angle(FPA)
Indica la senda de vuelo actual
con referencia a la línea de
horizonte.
372.
AT Active
Mode
AP Engagement
Status
ActiveLateral
Mode
Active Vertical
Mode
AT Armed
Mode
AT Engagement
Status
Armed Lateral
Mode
Armed Vertical
Mode
FD Source
Flight Mode Annunciator (FMA)
373.
FD
PUSH DIR
CRS
FLCH
VS
VNAV ALT
AP
YD
NAV
BANK
HDG
HDGSEL
APP
PUSH SYNC PUSH DIR
CRS
FD
SRC
V/L
HSI
FPR
PREV
FMS
BRG
BARO
RA
MINIMUMS
FPA SEL
A/T
BARO SET
hPa
IN
PUSH STD
BRG
HSI
PREV
FPR
WX
V/L
FMS
BARO
RA
MINIMUMS
DN
UP
VS
PUSH CAS-MACH
MAN
AUTO
SPEED
PUSH FT-M
ALT SEL
BARO SET
PUSH STD
hPa
IN
WX
DCU 1 GP DCU 2
Guidance Panel ( GP )
Activación:
Desactiva elmodo lateral activo
Seleccion del modo TO en tierra (boton TOGA)
Logica de los Modos (Mode Logic):
Angulo de inclinación (bank) 6 - AP nivela las alas.
Angulo de inclinación (bank) > 6 pero 35 - AP mantiene el presente ángulo.
Angulo de inclinación (bank) > 35 - AP mantiene 35 de ángulo.
Para ajustar el ángulo de inclinación (bank) entre 6 y 35 - TCS puede ser
utilizado.
AP ROLL
Roll Hold (ROLL)
376.
Selector de Rumbo(Heading Select - HDG)
AP HDG
Activación:
Presionando botón HDG en el guidance panel.
En cualquier momento que LNAV, LOC o BC este armado.
Desactivación:
Presionándo el botón HDG por segunda vez.
Cuando LNAV, LOC o BC este activado.
Cuando la perilla selectora de HDG (HDG selector knob) es
presionada, el puntero de rumbo (heading bug) se sincronizará con el
presente rumbo. El FD respetara el lado hacia el cual el viraje fue
comandado, sin importar que este sea mayor de 180 grados.
377.
Navegación Lateral (LateralNavigation - LNAV)
Activación:
Presionando el botón NAV en el guidance panel cuando el FMS (Flight
Management System) es el seleccionado como modo Primario de
Navegacion.
Desactivación:
Transición automática a LOC o BC a través de la función de Preview.
Selección de otro Modo Lateral.
Proveé comandos de FD de guía lateral para la intercepción, captura y
seguimiento de plan de vuelo activo del FMS.
AP LNAV
378.
Localizer (LOC) yBack-Course (BC)
Activación:
Presionando el botón APP cuando una frecuencia válida de
localizador es la fuente activa de navegación.
El Localizer y Back-Course son conducidos de manera automática por
el FD de acuerdo a la frecuencia LOC, Información del CDI y posición
de la aeronave.
AP LOC
379.
Track Hold (TRACK)
APTRACK
Asociado con los Modos Verticales TO y GA.
Transición automática de ROLL a TRACK con:
IAS > 100KT
Bank ± 3 por 10 seg
380.
Controles de GuiaVertical
(Vertical Guidance Controls)
Modos Verticales (Vertical Modes)
381.
Generalidades
Naturaleza de laGuía relacionada al Modo Vertical:
Speed-on-Elevator (SPDE)
El AP es responsable del control de la velocidad.
El AT es responsable de establecer los diferentes rangos de potencia
(CLB, IDLE, TO, GA).
Speed-on-Thrust (SPDT)
El AP es responsable de mantener el valor seleccionado al MODO
correspondiente
El AT es responsable establecer y ajustar la potencia a fin de mantener la
velocidad seleccionada.
382.
Modos Verticales (VerticalModes)
Modos Verticales relacionados con Speed-on-thrust:
Flight Path Angle (FPA) – modo vertical básico
Vertical Speed (VS)
Glide Slope (GS)
Altitude Hold (ALT)
Altitude Select (ASEL)
Modos Verticales relacionados con Speed-on-elevator:
Flight Level Change (FLCH)
Overspeed (OVSP)
Takeoff (TO)
Go around (GA)
383.
Windshear
WSHR
GA
Aunque no esuna función seleccionable por el piloto, la
protección de Windshear iluminara el aviso de “WSHR” como el
modo vertical activo en el FMA.
El modo vertical que estaba activo se mantendra armado (blanco)
y pasará a ser de nuevo el modo activo cuando la protección de
Windshear ya no sea necesaria.
El AP se desconecta cuando WSHR
se vuelve el modo activo
384.
Flight Path Angle(FPA)
Modo Vertical Básico
Activación:
Seleccionando un botón dedicado en el Guidance Panel GP.
Desactivando el Modo vertical Activo.
Cuando esta activado la Línea de Referencia de Senda de Vuelo (Flight Path
Reference Line), aparece en el PFD.
La Línea de Referencia de Senda de Vuelo (Flight Path Reference Line) puede
ser seleccionada/ajustada ( 9,9) atravez de la perilla de FPA en el GP.
AP FPA
385.
10 10
10 10
2020
7.0
Línea de Referencia de Senda de Vuelo
(Flight Path Reference Line)
Asociada al modo FPA o,
cuando seleccionada,
independientemente del
modo vertical activo
presionando el boton FPR
en el DCU
386.
Take Off (TO)
Modo particular del FD unicamente. No acepta activación del AP.
Acepta cambios de Modo Lateral
Se activa en tierra por medio del boton TOGA.
Simbología:
Cross-bar
FPA inhibido
Desactivación:
Selección de otro modo vertical.
Uso del TCS
Activación del AP.
TO
387.
Take Off (TO)
Guía:
La Primer Guia es flap pitch – “FPA-fundamentalmente pitch
guidance”
- FLAP 1 – pitch 11º
- FLAP 2 – pitch 10º
- FLAP 4 – pitch 12º
En vuelo y IAS speed target, guía speed target
TO
388.
Take Off (TO)
Speedtarget
• AEO:
V2+10
• OEI:
Engine failure por debajo de V2, guía V2
Engine failure entre V2 y V2+10, guía presente velocidad
Engine failure por encima de V2+10, guía V2+10
• Base de Información – V2 insertada en FMS (PERF>TAKEOFF 3/3)
• If speed target is not valid – guides to a fixed pitch according to the flaps
in use
TO
389.
Take Off (TO)
TO
Limitsand protections
Pitch: - maximo 18
- minimo 8
Speed target: - maximo Vfe-5kt
- minimo Vshaker + 10kt (AEO) /
Vshaker + 3kt (OEI)
390.
Go Around (GA)
Activación:
•Aeronave en vuelo
• Botón TOGA presionado desde cualquier lado
Symbología:
• Indicación FPA y FD
Desactivación:
• Selección de otro modo vertical
• Uso del TCS
AP GA
391.
Go Around
Guía:
• GuíaInicial pitch 8
• Cuando IAS speed target, guía speed target
AP GA
392.
Go Around
Speed target
•AEO: Vref+20
• OEI: Vac (approach climb)
• Base de Información – Vref y Vac insertada en FMS (PERF>LANDING
3/3)
• Si speed target no es válida – guía a pitch 8
AP GA
393.
Go Around
Limits andprotections
Pitch: - máximo 18
- mínimo 8
Speed target: - máximo Vfe-5kt
- mínimo Vshaker + 10kt (AEO) /
Vshaker + 3kt (OEI)
AP GA
394.
Flight Level Change(FLCH)
• La naturaleza/base de la guía es SPDe, para velocidades
seleccionadas a través del speed bug.
Activación:
• Presionando el botón FLCH en el GP.
Desactivación:
• Selección de otro modo vertical.
• Uso del TCS.
AP FLCH
395.
Flight Level Change(FLCH)
Speed target – perilla de selección de velocidad (speed
selector knob)
• Indicación cyan en el PFD – velocidad seleccionada a
través de la perilla de selección de velocidad, con transición
automática CAS/MACH cerca de 29,000 pies.
AP FLCH
396.
Overspeed (OVSP)
• Similara la lógica operativa de FLCH logic con un poco mas
de autoridad.
• Protección Vmo/Mmo.
• Cuando se activa, OVSP se ilumina (ambar) en el FMA, el
modo activo previo es mostrado como ARMADO (blanco) y se
vuelve el modo activo de nuevo cuando la protección
overspeed ya no es necesaria.
OVSP
AP
FLCH
397.
AP ALT
Altitude Hold(ALT)
Cuando ALT esta activado, es posible unicamente activar otro modo
vertical si el piloto ejecuta el cambio a través del Preselector de
Altitud (Altitude Preselector).
Si otro modo vertical es comandado sin realizar cambio en el
Preselector de Altitud, el aviso de ALT en el FMA se iluminará de
forma intermitente por 5 segundos en conjunto con LA INDICACIÓN
DIGITAL DE ALTITUD en el PFD, invitando al piloto a cambiar el valor
y permitir al sistema que realize la solicitud de cambio de altitud.
Las excepciones a esta regla es el modo GS, el cual puede ser
activado desde el modo ALT sin realizar cambios en el Preselector de
Altitud.
398.
3
4
6
33
0
VS
LNAV
LOC GS
AP
AT
SPDT
LOC1
Preview Feature.
1-Display - Mostrara el HSI associado a
la frecuencia NAV seleccionada (LOC) con
el FMS seleccionado en el PFD como
fuente primaria de navegación.
2- Cuando el modo APPR es armado, el
AP interceptará el LOC mientras sigue
mostrando el FMS como la fuente primaria
de Navegación.
3- Al realizar la intercepción la fuente
primaria de navegación pasa a ser LOC o
BC eliminando el FMS como fuente de
navegación.
399.
Yaw Damper
El YawDamper envía comandos al
Rudder a través del sistema Fly by
Wire y trabaja independientemente de
los sistemas de Piloto Automático (AP)
y Director de Vuelo (FD).
Activacion del A/T
EnTierra
Condiciones:
• AT Capaz (Todos los parametros requeridos validos).
• Modo AT TO armado.
• Ambos aceleradores por encima de 50° TLA.
404.
Activacion del A/T
EnVuelo
Condiciones:
• AT Capaz (Todos los parametros requeridos validos).
• Presionado de boton AT en en GP
• Por encima de 400 pies AGL.
405.
Desactivación Manual delA/T
• Presionando cualquiera de los botones “Quick Disconnect Button” en las
palancas de aceleradores.
• Presionando el botón AT button en el Guidance Panel.
• Diferencia de separación entre las palancas de
aceleradores mayor de 8°.
406.
Modos del A/T
•Speed-on-thrust (SPDt) – AT ajusta la potencia para
mantener la velocidad seleccionada.
• Speed-on-elevator (SPDe) – AP responsable de
mantener
la velocidad seleccionada; el A/T ajustara la potencia
para el regimen de empuje seleccionado.
• Take off & Go Around (TO/GA) – Similar a SPDe, pero el
A/T comandara TLA (Thrust Lever Angle) a la posición de
TOGA.
407.
Modos del A/T
•Hold (HOLD) – TO es el modo activo y el IAS>60kts. Los
servos del A/T se desenergizan no permitiendo ningun
movimiento de las palancas de potencia hasta alcanzar
400 pies.
En caso HOLD se activa con TLA<TOGA, el mensaje CAS
“TLA NOT AT TOGA” aparecerá.
408.
Modos del A/T
•Limited thrust (LIM) – El modo Vertical seleccionado requiere mas/menos
potencia (empuje) de la disponible. Ejemplo: VS o FPA que requieren mayor
potencia (empuje) del regimen que se esta utilizando en ascenso (climbing)
o
por debajo de IDLE en descenso.
También en ALT, si la velocidad seleccionada requiere mayor potencia del
regimen seleccionado. En estos casos, el A/T no sera capaz de mantener
la velocidad seleccionada y LIM sera desplegado en el FMA en colo AMBAR.
LIM esta relacionado con la velocidad en el modo de potencia SPDt.
409.
Modos del A/T
•Override (OVRD) – Mientras el piloto mueve manualmente los aceleradores
con el sistema aun activado, el A/T sigue comandando la posición
computada.
OVRD (verde) será desplegado en el FMA mientras se mantenga
la
condición.
El sistema no desconectara el A/T mientras este en OVRD. Una
desconexión
sería causada unicamente por el movimiento de los aceleradores a una
posición por encima de TOGA.
410.
Avisos del FMA
TOTO
ROLL
TO
ROLL TO Despegue, modo TO
armado, TLA<50°.
Despegue, TLA>50°,
modo TO conectado.
411.
HOLD TO
ROLL Despegue,IAS>60KT,
modo HOLD activado
HOLD TRK TO
GA TRK GA
Avisos del FMA
Despegue, IAS>100KT,
+10seg<3deg bank.
Go around, modo GA
activado y IAS>100KT
412.
Avisos del FMA
SPDEFLCH
HDG
SPDT
FPA
HDG
SPDe activado - FLCH
como el modo vertical.
SPDt activado - FPA
como el modo vertical.
413.
OVRD
SPDT
LIM VS
HDG
SPDT
Avisos delFMA
OVRD debido a comando
manual simétrico realizado
por el piloto de los
aceleradores. El modo activo
previo se mantiene armado.
LIM debido a una selección
incorrecta de VS y velocidad.
La potencia (empuje)
disponible no es capaz de
mantener los valores
seleccionados. El modo activo
previo se mantiene armado.
414.
AT con unmotor INOP (Single Engine Operation)
• A la pérdida de un motor, el AT se mantiene conectado,
controlando
el motor operativo. El servo del acelerador asociado al motor fallido
es desenergizado, permitiendo el control de los aceleradores.
La condición anterior es valida en caso el motor se ha perdido o ha
sido apagado.
La reducción de un acelerador en un simulacro de perdida de motor,
por ejemplo, causara la desconexión del AT debido a la diferencia
en posición (separación) de los aceleradores. 8 grados
415.
AT – ‘‘TLA Trim“
• Realizará ajustes pequeños de potencia bajo autoridad limitada.
• Reduce el movimiento excesivo de los aceleradores.
• Sincroniza el N1 de lo motores (aumentando comfort).
• Activado aun con AT apagado
• Por default esta ON cuando el el AT es conectado.
• Con AT apagado, la selección de TLA Trim (ON u OFF) está
disponible en ambos MCDUs (pag. TRS).T Rating Select
416.
Pagina TRS enel MCDU
TLA TRIM
ON OFF
TRS AUTO
TRS manual rating
selection.
TRS Key
417.
Seleccion de TRS(Thrust Rating Selection TRS)
El Automatic Flight System tiene un Auto Rating Type Transition
Logic que controla los cambios de regimen del motor de acuerdo
a la Fase de Vuelo/ Configuración de la Aeronave y número de
motores operando.
En tierra el regimen seleccionado (Engine Rating selection) es
TO y se mantiene asegurado de esa manera hasta 400ft AGL.
En caso ambos motores estan operativos, el tren de aterizaje
esta retractado y la altitud es por encima de 400ft AGL, cualquier
cambio en modo vertical causara el cambio de TO a CLB. Si no
se realiza ningun cambio de modo vertical el regimen cambiara
de forma automatica a CLB al alcanzar 3000ft (PressureAltitude)
AFE.
418.
Selección de TRS(Thrust Rating Selection TRS)
• La fase activa de vuelo TRS se transfiere a CLB cuando la
aeronave se encuentra en vuelo y el Pre-selector de Altitude es
mayor al Altitud Barometrica (Baro Altitude).
• En caso solo un motor esta corriendo, el regimen cambiara de
TO
a CON al alcanzar 3000ft Pressure Altitude AFE.
• La fase activa de vuelo TRS se transfiere a CRZ cuando la
aeronave
se encuentra en vuelo y la altitud barométrica (Baro Altitude) es
+/- 100ft de la Altitud en el Pre-selector por 90 segundos.
APPR 1
SPD AP
AT
APPR1
LOC GS
ALIGN FLARE
APPR/LAND Engaged Status Field
APPR 1 ONLY APPR 1
SPDT AP LOC GS
AT
APPR/LAND Armed Status Field
Armed Status (white) Engaged Status (green)
Anunciador de Status del AutoPilot Approach
421.
FD
PUSH DIR
CRS
FLCH
VS
VNAV ALT
AP
YD
NAV
BANK
HDG
HDGSEL
APP
PUSH SYNC PUSH DIR
CRS
FD
SRC
V/L
HSI
FPR
PREV
FMS
BRG
BARO
RA
MINIMUMS
FPA SEL
A/T
BARO SET
hPa
IN
PUSH STD
BRG
HSI
PREV
FPR
WX
V/L
FMS
BARO
RA
MINIMUMS
DN
UP
VS
PUSH CAS-MACH
MAN
AUTO
SPEED
PUSH FT-M
ALT SEL
BAROSET
PUSH STD
hPa
IN
WX
RA/BARO Selector (outer knob)
RA/BARO Minimums (inner knob)
RA / Baro / Minimum Selector
422.
Secuencia en Aproximación(CAT II)
AT
AP HDG ALT
SPDT
LOC GS
APP R 2
AT
AP HDG ALT
SPDT
LOC GS
AT
AP LOC
SPDT GS
APPR 2
APP R 2
LOC
AT
AP LOC
SPDT
APPR 2 APPR 2
GS
1.
2.
3.
4.
1,500’ -
AP/AT conectado en HDG/ALT. AP manteniendo rumbo y altitud
seleccionada. AT manteniendo la velocidad(SPD) eleccionada.El botón
APP en el GP presionado armando los modos LOC/GS. Autopilot
Approach Status Annunciator muestra APPR 2 armado.
Captura de Localizador
Captura de Glideslope
Below 1,500 ft:
Con RA seleccionado en los mínimos
para CAT2, el AP Approach Status
Annunciator muestra APPR 2 en
verde.
423.
APPR 1
SPD AP
AT
LOCGS
AUTOLAND
AT
AP LOC
SPDT GS
APPR1
Captura de Glideslope
1,500’ Por debajo de 1,500 ft:
Con RA/BARO seleccionado en BARO, el AP
Approach Status Annunciator muestra APPR 1,
permitiendo un aproximiacion CAT1.
- APPR 2 no está disponible (mensaje CAS de alerta “APPR 2 NOT AVLB”)
Secuencia en Aproximación CAT1 o
APPR 2 no disponible
424.
SPD AP
AT
LOC GS
APPR1 ONLY
T
AUTOLAND
AT
AP LOC
SPDT GS
APPR 1 ONLY APPR 1
AT
AP
SPDT GS
APPR1
LOC
Por debajo de 1,500 ft:
Debido a que APPR 2 no está disponible y RA/BARO ha
sido incorrectamente puesto en RA, el AP Approach
Status Annunciator muestra ambos APPR 1 ONLY en
color ambar (asociado con la lectrura digital RA Min. en
el PFD) y APPR 1, en verde.
Cuando se realiza el cambio de selección de
RA/BARO a BARO, el AP Approach Status
Annunciator cambia a la configuración
normal CAT1.
1,500’ -
Captura del Glideslope
- APPR 2 no está disponible (mensaje CAS de alerta “APPR 2 NOT AVLB”)
- RA/BARO incorrectamente seleccionado a RA.
Aproximación
425.
AT
AP HDG ALT
SPD
T
LOCGS
APPR 2
SPD
AT
AP GS
LOC
APPR 2
APPR 2
APPR 2
SPD
AT
AP GS
LOC
SPD
1,500’ -
APPR 1 ONLY APPR 1
AP
AT
LOC GS
800’ -
1.
2.
3.
4.
1. Botón APPR presionado en el GP, armando APPR 2.
2. Captura de Glideslope
3. Si los flap no están
seleccionados en 5,
APPR 2 se mantiene
armado por debajo
de 1,500 ft, en
espera de acción
correctiva.
4. Por debajo de 800ft, ya que los
flap no fueron corregidos,
y el Sistema se encuentra aun
seleccionada para APPR 2, el
AP Approach Status Annunciator
muestra ambos, APPR 1 ONLY
en color ambar, y APPR 1, en
color verde. Seleccionando BARO
en el botón RA/BARO apaga la
alerta “APPR 1 ONLY” .
Secuencia en Aproximación – Selección de Flap Incorrecta
Controles e Indicaciones
1-Control wheel
DESCRIPCIÓN
Control wheel communications switch:
PTT: Permite la transmisión VHF y la comunicación de voz a los pasajeros.
HOT: Permite la comunicación entre tripulantes y personal de rampa.
OFF: Solo permite la recepción de audio.
429.
.
2- Glareshield Communication
DESCRIPCIÓN
GLARESHIELDPTT BUTTON: Permite la transmisión VHF y la comunicación a los pasajeros
PASSENGER ADRESS PTT BUTTON: Permite la comunicación de voz a los pasajeros, permitiendo
la selección de audio del panel de control.
430.
3- Hand Microphonecontrols
DESCRIPCIÓN
Hand MIC PTT BUTTON: Permite la transmisión de ACP , al mismo tiempo que la comunicación a
los pasajeros.
431.
4-Captain and FirstOfficer Jack Panels
DESCRIPCIÓN
Captain and First Officer: Permite enchufar el headphone (PHONE), headset (ANR HDST),
Hand microphone (HAND MIC) y boom microphone (BOOM MIC).
432.
5- Observer jackpanel
DESCRIPCIÓN
Observer Jacks: Permite enchufar el headphone (HDPH), headset (ANR HDST) y boom microphone (BOOM)
OBSERVER COMMUNICATION SWITCH
PTT: Permite la transmisión VHF y la comunicación de voz a los
pasajeros.
HOT: Permite la comunicación entre tripulantes y entre tripulantes y
personal de rampa.
OFF: Solo permite la recepción de audio.
433.
6-Ramp Station
DESCRIPCIÓN
Cockpit callButton: Una vez presionado realiza un sonido HI/LO y el botón anunciador de rampa
realizara flashes en el audio control panel.
Microphone /Head phone Jack: Permite al personal de tierra enchufar en un headphone y
microphone equipado con un PTT button.
NOTE: El panel del personal de tierra se encuentra conectado con el hot mic una vez que el botón
de rampa fue selectado.
435.
7-Digital Voice-Data Recorder
DESCRIPCIÓN
Selectorswitch:
FWD: Permite test functions del DVDR 1, que esta ubicado en la parte delantera del electronic
bay.
AFT: Permite test functions of DVDR 2, que esta ubicado en la electronic bay trasera.
Head phone jack:
Tono de transmisión de los monitores durante el test o en el monitor playback del voice audio.
Test Button:
Simultanemente testea el CVR y funciones FDR en cada DVDR. La DVDR en donde se
realizará el test es selectado en el selector switch.
Un tono Aural se escuchará a través del headset si la unidad pasara el test.
NOTE: Un tono aural es escuchado solo en los aviones equipados con honeywell DVDR. Para
aviones equipados con L3 DVDR, observe que no habrá mensaje de ERROR en el EICAS.
Cvr Erase Button: Borra el grabado de información siempre que el avión se encuentre en tierra
con el PARKING BRAKE colocado.
437.
DVDR: recibe, grabay preserva
toda la información
relacionada al vuelo
SU CAPACIDAD ES DE:
2 horas de iformación de
audio.
25 horas de datos de vuelo.
2 horas de comunicación de
mensajes
438.
8-Printer
DESCRIPCIÓN
1-PPR ADV: Continuamenteavanza el papel mientras se presiona el botón.
2 LOW PPR: Se enciende una luz cuando el papel de la impresora se esta agotando.
3-TEST BUTTON: Se iluminan todos los indicadores de impresión de acuerdo a lo previamente
seleccionado.
4-ALRT RST BUTTON: No funcional
5-FAULT BUTTON: Se enciende la luz cuando no hay papel o la impresión no esta saliendo correctamente.
6-OFF BUTTON: Apagado.
439.
COMUNICACIONES
SINTONIA DESDE ELFMS (MODO PRIMARIO)
• INTRODUCIR FRECUENCIA DESDE SCRATCHPAD
• SELECCIONAR LA FRECUENCIA EN STBY, Y MODIFICARLA CON LAS PERI-
LLAS CONCENTRICAS DEL MCDU
• SELECCIONAR UNA FRECUENCIA EN MEMORIA DESDE PAGINA COM
• EL VHF 3 SE SINTONIZA DESDE LA PAGINA RADIO 2/2
SINTONIA DESDE EL PFD (MODO SECUNDARIO)
1. PRESIONAR EL BOTON PFD EN EL CCD
2. CON EL TOUCHPAD SELECCIONAR EL CUADRO COM CORRESP.
3. SINTONIZAR LA FRECUENCIA STBY CON LAS PERILLAS CONCENTRICAS
4. ACTIVAR LA FRECUENCIA CON LA TECLA ENTER
VHF COMM TUNING
440.
VHF COMM TUNING
BACKUPTUNING
SE ACCEDE DESDE EL MCDU 2 PRESIONANDO EL BOTON MENU
LUEGO SE ACCEDE A LA PAGINA PRESIONANDO LSK 4L
SE UTILIZA EN CASO DE NO DISPONER DE LOS MODOS PRIMARIO
Y SECUNDARIO DE SINTONIA.
SIRVE PARA SELECTAR SOLO EL COM 1, NAV 1 Y TRANSPONDER
ANTE CIERTAS CONDICIONES DE FALLA, APARECE AUTOMATICAMENTE
441.
SERVICE INTERPHONE:
EMER: TRIPLETONO HI/LO EN PA. ENCIENDE LUZ ROJA EN ATTND STATION. BARRA FLASHEA
HASTA QUE ATTND ATIENDE LA LLAMADA (AHÍ COMIENZA A FLASHEAR MAS RAPIDO.
PRESIONANDO NUEVAMENTE, QUEDA LA LUZ FIJA Y SE PUEDE HABLAR
RAMP: HABILITA COMUNIC. CON PERSONAL DE TIERRA. SI LLAMA TIERRA, LA LUZ FLASHEA Y
HAY UN TONO SIMPLE HI/LO.
CABIN: TONO SIMPLE HI/LO EN PA. IGUAL PROCEDIMIENTO QUE EN EMER PARA ESTABLECER
COMUNICACIÓN
BACKUP VULUME:
NORM: (ADENTRO) OPERACION NORMAL
BKUP: (AFUERA) ACTIVA OPERACION BACKUP SI FALLA LA ENERGÍA AL PANEL DE AUDIO O SI
FALLAN AMBAS DIGITAL AUDIO BUSES. EN ESTE CASO QUEDA DISPONIBLE EL VHF 1 PARA CAPT,
Y VHF 2 PARA F/O
AUDIO CONTROL PANEL (ACP)
HAY 3 ESTACIONES (UNA POR PILOTO + OBSERVADOR)
SELECTORES DE TRANSMISION (SOLAMENTE UNO ACTIVO A LA VEZ)
SELECTORES DE CONTROL AUDIO.
SE ACTIVA AUTOMÁTICAMENTE CUANDO SE PRESIONA EL
SELECTOR DE TRANSMISION RESPECTIVO, O
MANUALMENTE PRESIONANDO EL BOTÓN. PERMITE
VARIAS SELECCIONES A LA VEZ . NO SE PUEDE DESELECTAR
SI EL BOTÓN DE TRANSMISION RESP. ESTA ACTIVADO
FILTRO ID. ELIMINA LA VOZ DEL AUDIO DE VOR Y ADF PARA
IDENTIFICACION DE SEÑAL
BOTÓN PA. HABILITA LOS ANUNCIOS POR EL PA Y
ENCIENDE LA LUZ DEL BOTON DE AUDIO
SELECTORES DE SALIDA DE AUDIO. PERMITEN
QUE EL AUDIO SELECCIONADO SEA ESCHUCHADO
POR ALGUNA DE LAS SALIDAS DE AUDIO:
SPEAKERS, INTERPHONE O HEADSETS. PERMITE
SELECCIONES SIMULTANEAS
MASTER VOLUME. REGULA EL VOLUMEN DE LA
ÚLTIMA FUENTE SELECTADA. EL VALOR SE VE EN
EL VISOR
BOTÓN SELCAL. FLASHEA CUANDO ENTRA UNA LLAMADA.
AL PRESIONAR SE VE EL CODIGO EN EL VISOR. ILUMINADO
FIJO CUANDO ESTA ACTIVO PARA TRANSMITIR
AUTO/MASK MIC SWITCH:
AUTO: (ADENTRO) EL MIC. DE MASCARA SE ACTIVA AL SACARLA
MAN: (AFUERA) EL MIC. SE ACTIVA SI FALLO EL SISTEMA AUTO
DESPUES DE USAR EL MICROFONO DE MASCARA, LAS TAPAS DE MASCARA DEBEN CERRARSE Y
PRESIONAR EL BOTON RESET PARA VOLVER A USAR LOS MICROFONOS NORMALES
EN CONDICIÓN DEEMERGENCIA
ELÉCTRICA
FMS 1 Y MCDU 1 se pierden!
El FMS se compone de:
• MAU:
Navigation Database
Custom Database
Company Database
Aircraft Database
Componentes
- La funciónde navegación combina información de posición y
velocidad de la aeronave para todas las fases de vuelo (oceanic,
enroute, terminal and approach), incluyendo navegación polar.
- La función de navegación automáticamente combina o selecciona
sensores de posición para computar información optima de
posición.
- El Piloto puede deseleccionar cualquier sensor si así lo desea.
Navegación
- El Plande Vuelo a activar puede ser programado manualmente punto por
punto de chequeo, o puede ser cargado de la memoria. Este es
actualizado de forma continua durante el vuelo.
- El Piloto puede guardar en la memoria de la computadora un Plan de
Vuelo utilizando la función de Planes de Vuelo Guardados y activarlo
posteriormente.
- La Planeación de Vuelo esta dividida en Plan de Vuelo Lateral y Plan de
Vuelo Vertical.
Planeación de Vuelo
452.
- Perfomance contieneadministración de combustible y
tiempos estimados para el vuelo.
- Performance estima altitud optima, modos de crucero, y
ascensos progresivos (step climbs).
- Performance trabaja en base a una secuencia fija de
velocidad. (En el futuro tendrá data de velocidades a
mantener de forma automática para cada fase de vuelo)
Rendimiento / Performance
Operación
• Post-Vuelo
RESET DECOMBUSTIBLE UTILIZADO EN EL MCDU
El reset es realizado a través del MCDU de la siguiente manera:
Presionar botón NAV para entrar en la página índice de navegación
Presionar LSK 3R (FLT SUM) para entrar en la página de resumen de vuelo
Presionar el botón DEL
Presionar LSK 2L para seleccionar combustible utilizado
462.
RESET DE COMBUSTIBLEUTILIZADO EN EL MCDU
El reset es realizado a través del MCDU de la siguiente manera:
Presionar botón NAV para entrar en la página índice de navegación
Presionar LSK 3R (FLT SUM) para entrar en la página de resumen de vuelo
Presionar el botón DEL
Presionar LSK 2L para seleccionar combustible utilizado
#368 Visual Warning Cancelation for the AP:
“AP” flashes on the FMA anytime the Auto Pilot is deactivated. Pressing the AP disconnect Button once will cancel the alarm.
The visual information will always flash for at least 5 seconds.
For normal disengagements, “AP” flashes green, in case an abnormal disengagement occurs, “AP” flashes red in the FMA and the CAS msg “AP FAIL” is displayed.
Pressing the AP Disconnect Button cancels the FMA visual warning but the CAS msg remains displayed.
Anytime the autopilot is deactivated, an aural alarm (“AUTOPILOT”) will be triggered.
For Manual disengagements the first time the AP Disconnect Button is pressed, the AP is disconnected and the second time the button is pressed the aural alarm is canceled. The aural will always sound at least once.
In case the system automatically disengages the Auto Pilot, a single pressing of the AP Disconnect Button will cancel the aural warning.