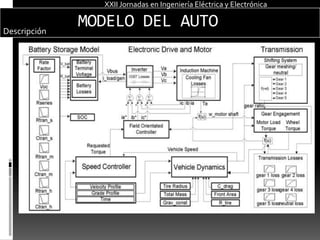
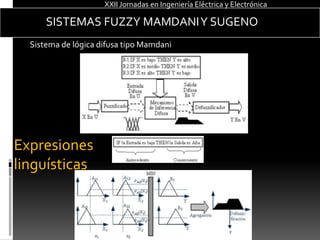
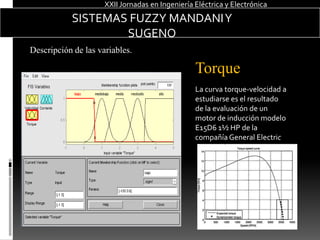
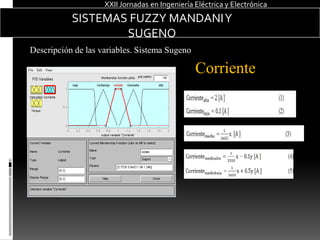
Este documento describe el uso de sistemas de lógica difusa Mamdani y Sugeno para controlar un vehículo eléctrico. Se modela el vehículo y sus componentes usando simulaciones dinámicas. Los sistemas difusos toman como entrada la velocidad y torque del motor de inducción, y proveen como salida la corriente requerida. Los resultados muestran que ambos sistemas pueden controlar adecuadamente la corriente para diferentes condiciones de velocidad y torque. El sistema Sugeno es más eficiente computacionalmente, mientras













































![Proyecto integrador_10[1]](https://cdn.slidesharecdn.com/ss_thumbnails/proyectointegrador101-140129145800-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)

















![Construction material ssss[1,k]](https://cdn.slidesharecdn.com/ss_thumbnails/constructionmaterialssss1k-101114132843-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)

















































