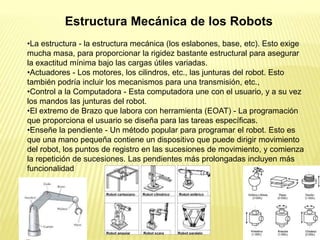
La palabra robot se utilizó por primera vez en 1920. Desde entonces, los robots han evolucionado de muñecos mecánicos a máquinas industriales programables. Los robots modernos tienen diversas aplicaciones como la soldadura, pintura y montaje en fábricas. Existen diferentes tipos de robots como los industriales, móviles, médicos y androides.