Descargar para leer sin conexión

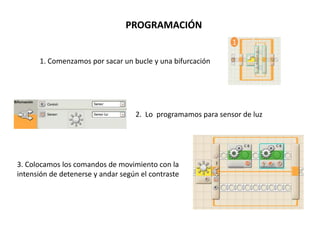


El documento describe cómo programar un robot para que avance siguiendo líneas o bordes mediante el uso de un sensor de luz. El robot verificará el color del piso usando el sensor y realizará la acción programada de detenerse o seguir cuando detecte un cambio de contraste. Se explican los pasos para programar al robot usando un bucle y bifurcación para que el movimiento se base en la intensidad de luz detectada por el sensor.

















































































