El documento introduce conceptos básicos sobre tensiones en materiales. 1) Se define tensión como las fuerzas internas que aparecen en un sólido deformable debido a fuerzas externas. 2) Las tensiones se pueden descomponer en tensión normal, la componente a lo largo de la normal de la superficie cortada, y tensión cortante, la componente tangencial. 3) En un punto dado, el estado de tensiones depende de la orientación de la superficie cortada, pudiendo haber diferentes valores de tensión.
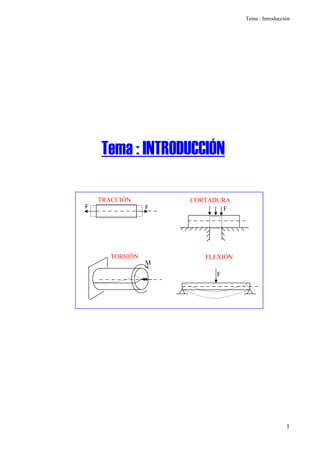





















































![Sección 3.4: Energía de deformación
Sobre las dos caras perpendiculares al eje X:
1 1 γ xy 1 γ
.σ x .dy.dz.ε x .dx + .τ xy .dy.dz. .dx + .τ xz .dy.dz. xz .dx =
2 2 2 2 2
1⎛ γ γ ⎞
= .⎜ σ x .ε x + τ xy . xy + τ xz . xz ⎟.dx.dy.dz
⎜
2⎝ 2 2 ⎟⎠
Y repitiendo lo mismo sobre las dos caras perpendiculares al eje Y y las dos caras
perpendiculares al eje Z, quedará:
1
dTe = dU = .(σ x .ε x + σ y .ε y + σ z .ε z + τ xy .γ xy + τ xz .γ xz + τ yz .γ yz ).dx.dy .dz
2
La energía de deformación por unidad de volumen será:
dU 1
u= = .(σ x .ε x + σ y .ε y + σ z .ε z + τ xy .γ xy + τ xz .γ xz + τ yz .γ yz ) (3.11)
dVol 2
Si sustituimos las deformaciones en función de las tensiones, según las ecuaciones 3.3
de la ley de Hooke generalizada
σx ⎛σ y σ z ⎞ τ xy
εx = ⎜ E + E ⎟
− ν .⎜ ⎟ γ xy =
E ⎝ ⎠ G
σy ⎛σ σ ⎞ τ yz
εy = − ν .⎜ x + z ⎟ γ yz =
E ⎝ E E ⎠ G
σy ⎞ τ zx
σz ⎛σ γ zx =
εz = − ν .⎜ x +
⎜ E ⎟
E ⎟
G
E ⎝ ⎠
quedará finalmente como expresión de la Energía de Deformación por unidad de
volumen:
u=
1
2 .E
[
. σ x + σ y + σ z2 − 2.ν .(σ x .σ y + σ x .σ z + σ y .σ z ) +
2 2
]
1
2.G
2
(
. τ xy + τ yz + τ zx
2 2
) (3.12)
La Energía de Deformación U del cuerpo elástico total será: U = ∫ u.d (Vol ) (3.13)
vol
Observación: En las fórmulas obtenidas no hemos considerado el Trabajo debido a las
Fuerzas de Gravedad que actuarían sobre el paralelepípedo, debido a que obtendríamos
un infinitésimo de 4º orden, que se despreciaría frente al Trabajo de las Fuerzas
Elásticas que es de 3º orden, como se ha visto.
9](https://image.slidesharecdn.com/teoriaestructuras-130106143430-phpapp01/85/Teoria-estructuras-55-320.jpg)















![Sección 3.7: Criterios para el dimensionamiento de secciones a resistencia
3.-Criterio de Von Mises de dimensionamiento:
Este criterio era el que se venía aplicando con la Normativa anterior.
Esta teoría esta basada en lo siguiente: “La energía de deformación que absorbe un
cuerpo se emplea en producir en él un cambio de volumen y unas deformaciones
angulares en las caras de los paralelepípedos elementales que lo forman”
Y esta teoría dice: “Un cuerpo falla elásticamente cuando la energía que se emplea en
las deformaciones angulares, alcanza el valor de ésta obtenido en el ensayo a tracción,
cuando en la probeta se alcanza la tensión del límite elástico fy
Para ver la fórmula que expresa esta teoría partimos de un paralelepípedo sometido a
sus tres tensiones principales: σ1>σ2>σ3
σ2 σm σ2-σm
σ1 σ1-σm
σm
= +
σ3 σm σ3-σm
(a) (b) (c)
Fig.3.33
El paralelepípedo de la fig.3.33.a., absorberá una energía de deformación U, que se
invertirá, por lo anteriormente dicho, en un incremento de volumen del paralelepípedo
U∆vol y en una deformación angular de sus caras: Ud.
Así pues resultará:
U = U ∆vol + U d (3.18)
Si sometemos al paralelepípedo a una tensión media σm dada por:
σ1 + σ 2 + σ 3
σm = (3.19)
3
este estado de tensiones, (ver fig.3.33.b), tan sólo proporcionará al paralelepípedo un
cambio de volumen: U∆vol, con lo cual el estado de tensiones de la fig.3.33.c, será el que
proporcionará la energía de deformación necesaria para las deformaciones angulares de
sus caras: Ud.
Por la ecuación (3.12) para obtener la energía de deformación, vista en la sección 3.4,
tendremos que:
U =
1
2 .E
[ 2 2
]
. σ x + σ y + σ z2 − 2.ν .(σ x .σ y + σ x .σ z + σ y .σ z ) +
1
2.G
(
. τ xy + τ yz + τ zx
2 2 2
)
25](https://image.slidesharecdn.com/teoriaestructuras-130106143430-phpapp01/85/Teoria-estructuras-71-320.jpg)






























































































































![Sección 9.2.1: Energía de deformación
9.2.-TEOREMAS ENERGÉTICOS
9.2.1.- ENERGÍA DE DEFORMACIÓN
La energía de deformación de un elemento estructural se podrá obtener a partir de las
expresiones dadas en 3.4:
• Energía de deformación por unidad de volumen:
u=
1
2 .E
[ 2 2
]
. σ x + σ y + σ z2 − 2.ν .(σ x .σ y + σ y .σ z + σ z .σ x ) +
1
2.G
.(τ xy + τ yz + τ zx ) (9.1)
2 2 2
• Energía de deformación:
U = ∫ u.dV (9.2)
V
Se calculará a continuación la Energía de deformación: U, para el caso de elementos
estructurales sometidos a una sola solicitación:
A. TRACCIÓN-COMPRESIÓN: N
Componentes del estado de tensiones:
z
N
N σx = σy = 0 σz = 0
N A
x τ xy = 0 τ yz = 0 τ zx = 0
L y y llevando estos valores a
las expresiones (9.1) y (9.2):
Fig.9.1
2
2
1 ⎡N ⎤ 1 N 2 .dx
L
1 1 ⎛N⎞ U = ∫ u.dV = ∫ . ⎢ ⎥ . A.dx = .∫ (9.3)
u= .σ x =
2
.⎜ ⎟ 2.E ⎣ A ⎦ 2 0 E. A
2.E 2.E ⎝ A ⎠ V L
3](https://image.slidesharecdn.com/teoriaestructuras-130106143430-phpapp01/85/Teoria-estructuras-198-320.jpg)
















































![Tema 10: Pandeo
2.- Para los casos de barras de sección variable, de esfuerzos de compresión variables,
de barras de sección compuesta o de elementos triangulados o de pilares de edificios,
ver la Normativa indicada. Su estudio es objeto de otras asignaturas específicas.
10.3.3.- CURVAS EUROPEAS DE PANDEO
Las curvas de pandeo ECCS están basadas en los resultados de más de 1000 ensayos
sobre varios tipos de piezas: I, H, T, [, ∟, ⊥ , [ ], Ο, con diferentes valores de esbeltez
(entre 55 y 160). Se han tenido en cuenta una imperfección geométrica de falta de
rectitud del eje del pilar, tomando un eje semisinusoidal de magnitud f = L/1000, así
como los efectos de tensiones residuales relativas a cada tipo de sección transversal.
Las curvas de pandeo ECCS: ao, a, b, c y d, se muestran en la siguiente tabla 10.1 y el
utilizar unas u otras va a depender de la forma de la sección transversal del pilar
considerado, de la dirección en la que pueda ocurrir el pandeo (eje y o eje z) y del
proceso de fabricación utilizado en el pilar (laminación en caliente, soldado o
conformado en frío). Ver la tabla siguiente 10.2
Tabla 10.1 Curvas de pandeo
Éstas curvas nos proporcionan el valor para el coeficiente de reducción por pandeo χ,
en función de la curva de pandeo apropiada al caso y de la esbeltez reducida λ :
A. f y
λ= "esbeltez reducida" (10.14)
N cr
π 2 .E .I
siendo: N cr = (carga crítica de Euler)
L2
k
20](https://image.slidesharecdn.com/teoriaestructuras-130106143430-phpapp01/85/Teoria-estructuras-247-320.jpg)









































