Descargar para leer sin conexión

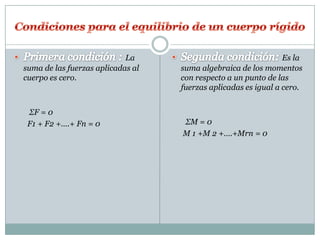
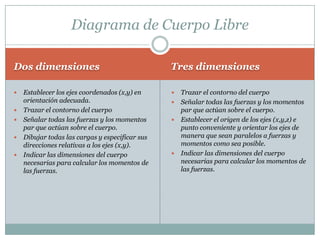
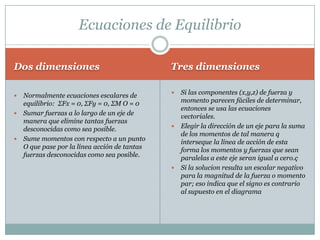
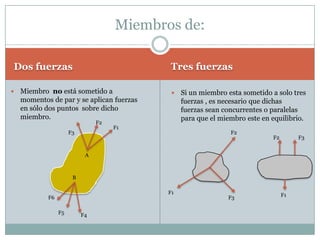

El documento habla sobre el equilibrio estático de los cuerpos rígidos. Explica que para que un cuerpo rígido esté en equilibrio, la suma de las fuerzas y de los momentos aplicados sobre él debe ser cero. También describe cómo dibujar diagramas de cuerpos libres en 2D y 3D, establecer ecuaciones de equilibrio escalares y vectoriales, y los tipos de restricciones y miembros que pueden existir en un cuerpo rígido.





















































