Descargar para leer sin conexión

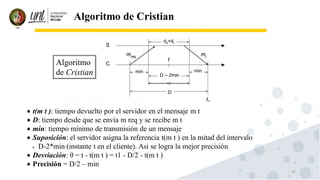
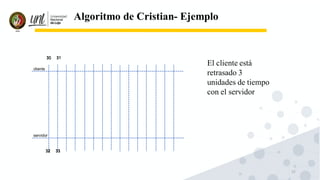
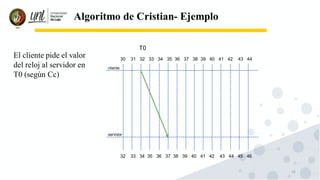
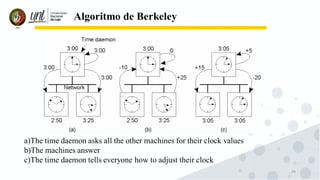
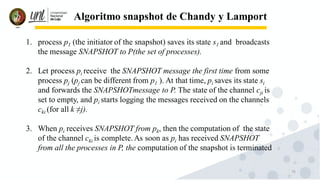
![62
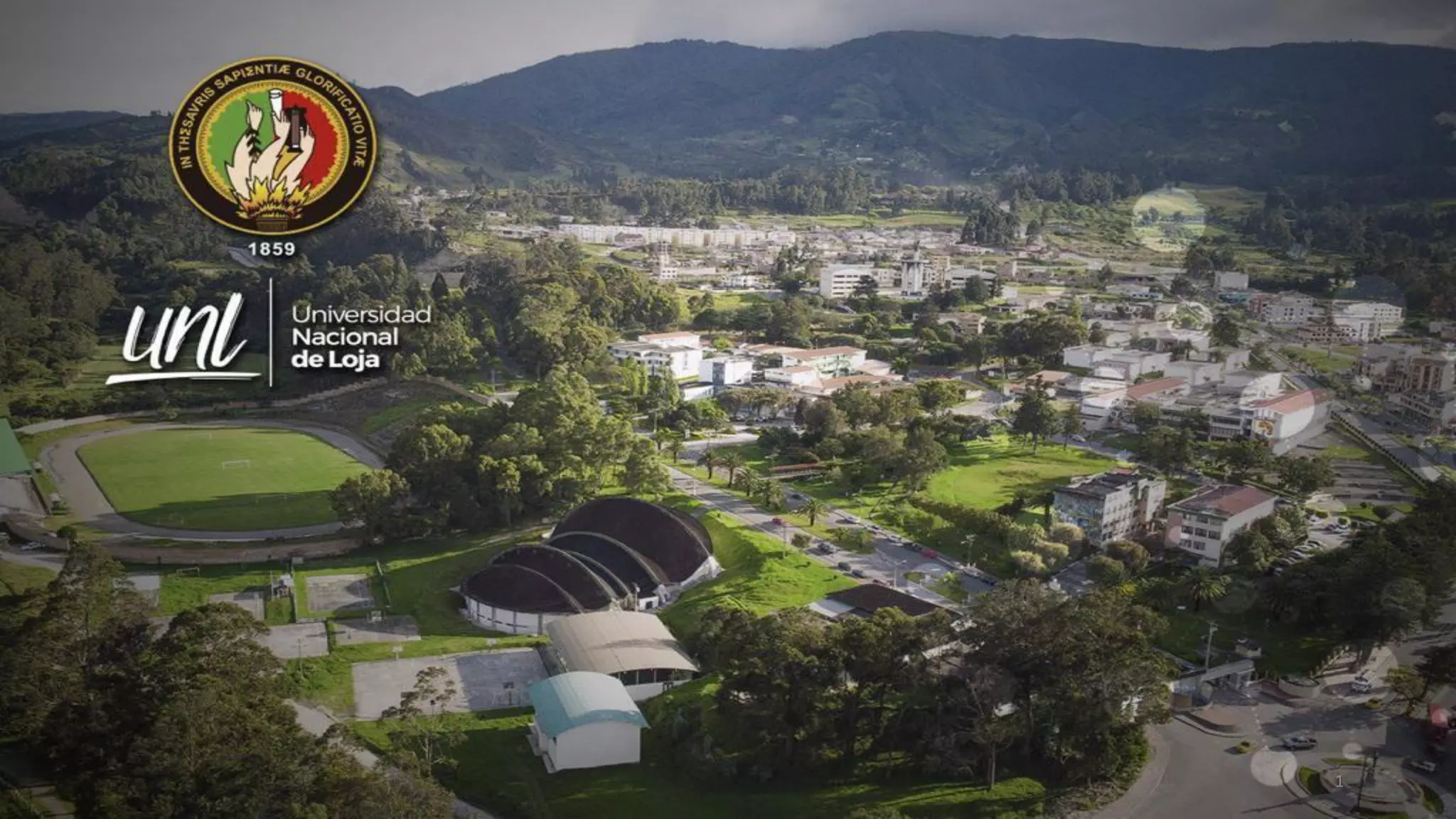
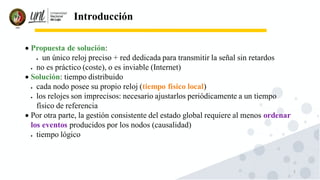
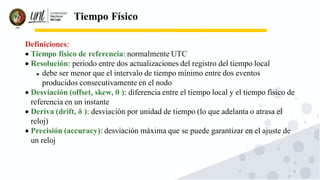
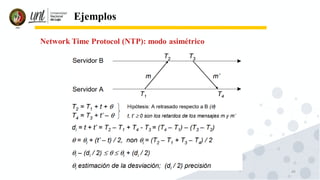
Vectores de tiempo
Definición:
V1 < V2 ⇔∀i V1[i] =V2[i] and∃j V1[j] <V2[j]
• Existirá relación de causalidad entre dos eventos (x, y) si y sólo si
V(x) < V(y) o V(y) < V(x)
• Si no, los eventos son concurrentes
• Los vectores de tiempos permiten determinar relaciones de causalidad con
total precisión:
Vi(x) < Vj(y)⇔x →y](https://image.slidesharecdn.com/tiempocausalidadyestadoglobal-210726142035/85/Tiempo-causalidad-y-estado-global-62-320.jpg)
![63
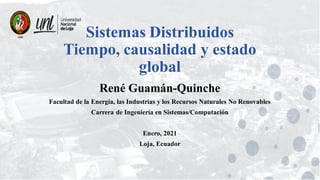
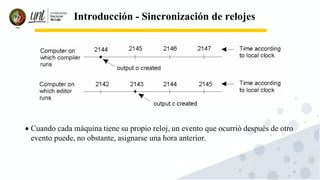
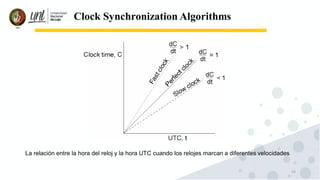
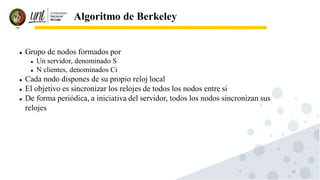
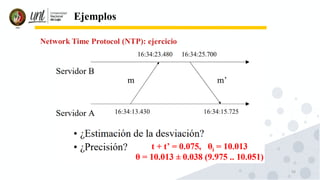
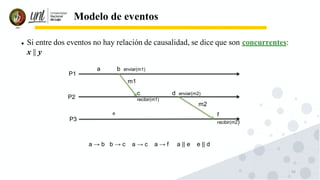
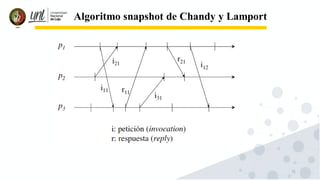
Vectores de tiempo
P1
P2
P3
b enviar(m1)
c
recibir(m1)
d enviar(m2)
f
recibir(m2)
[0,0,0]
[0,0,0]
[0,0,0]
a
e
[1,0,0]
[2,0,0]
[0,0,1]
[2,1,0] [2,2,0]
[2,2,2]
a → b b → c a → c a → f a || e e || d](https://image.slidesharecdn.com/tiempocausalidadyestadoglobal-210726142035/85/Tiempo-causalidad-y-estado-global-63-320.jpg)
![64
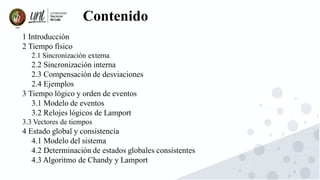
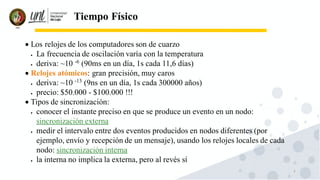
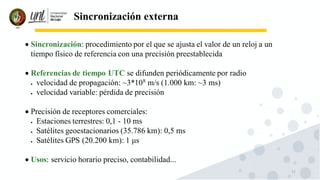
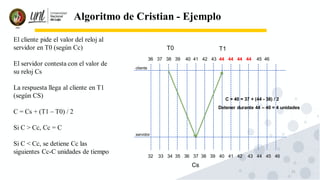
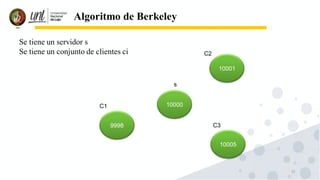
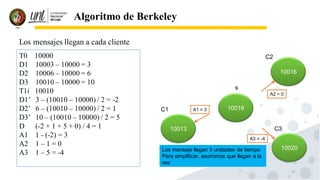
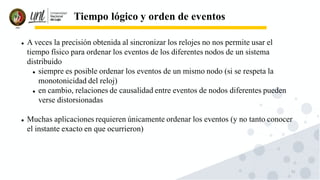
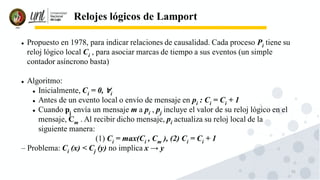
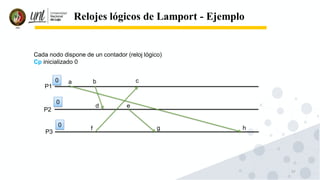
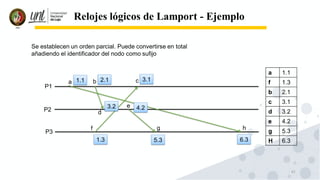
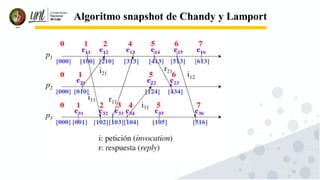
Vectores de tiempo - Ejemplo
[0,0,0]
[0,0,0]
[0,0,0]
a → b b → c a → c a → f a || e e || d
P1
P2
P3
a b c
d
e
f g h
Cada nodo p dispone de un reloj vectorial Vp inicializado con todos sus elementos 0](https://image.slidesharecdn.com/tiempocausalidadyestadoglobal-210726142035/85/Tiempo-causalidad-y-estado-global-64-320.jpg)
![65
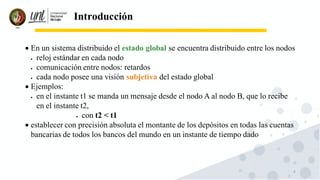
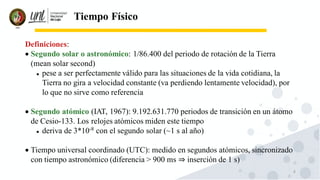
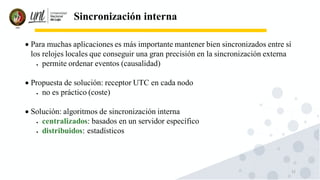
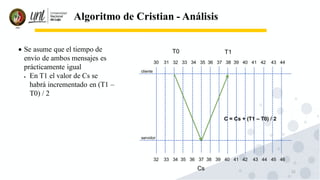
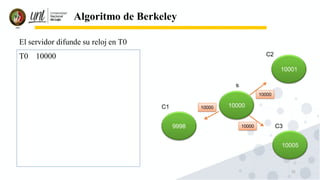
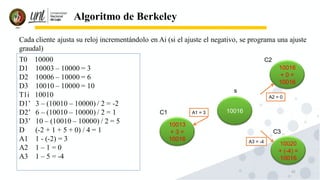
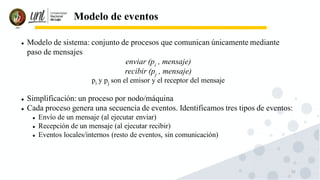
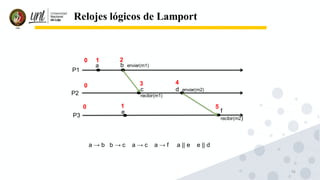
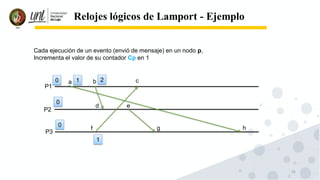
Vectores de tiempo - Ejemplo
[0,0,0]
[0,0,0]
[0,0,0]
[1,0,0] [2,0,0]
[0,0,1]
a → b b → c a → c a → f a || e e || d
P1
P2
P3
a b c
d
e
f g h
Un nodo p incrementa en 1 Vp[P] cada vez que envía el mensaje](https://image.slidesharecdn.com/tiempocausalidadyestadoglobal-210726142035/85/Tiempo-causalidad-y-estado-global-65-320.jpg)
![66
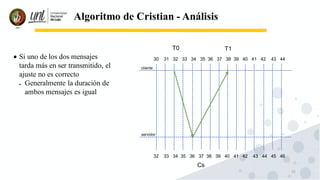
Vectores de tiempo - Ejemplo
[0,0,0]
[0,0,0]
[0,0,0]
[1,0,0] [2,0,0]
[0,0,1]
a → b b → c a → c a → f a || e e || d
P1
P2
P3
a b c
d
e
f g h
Un mensaje m enviado por un nodo p lleva asociado su reloj vectorial. Es decir, Vm = Vp
[2,0,0]
[0,0,1]
[1,0,0]](https://image.slidesharecdn.com/tiempocausalidadyestadoglobal-210726142035/85/Tiempo-causalidad-y-estado-global-66-320.jpg)
![67
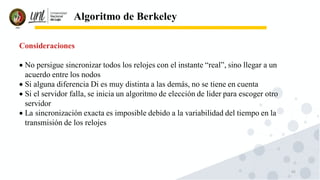
Vectores de tiempo - Ejemplo
[0,0,0]
[0,0,0]
[0,0,0]
[1,0,0] [2,0,0]
[0,0,1]
[2,1,0]
a → b b → c a → c a → f a || e e || d
P1
P2
P3
a b c
d
e
f g h
Al recibir p un mensaje, incrementa en 1 Vp[P] y además ∀i, 1<i<N,
Vp[1] = max (Vp[i], Vm[i])
[2,0,0]
[0,0,1]
[1,0,0]
[3,0,0] [3,0,1]
[0,0,1]](https://image.slidesharecdn.com/tiempocausalidadyestadoglobal-210726142035/85/Tiempo-causalidad-y-estado-global-67-320.jpg)
![68
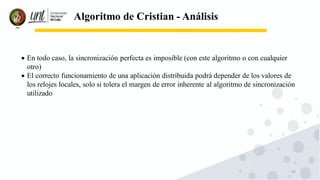
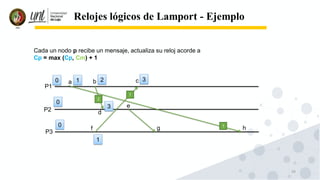
Vectores de tiempo - Ejemplo
[0,0,0]
[0,0,0]
[0,0,0]
[1,0,0] [2,0,0]
[0,0,1]
[2,1,0] [2,2,0]
[2,2,2]
a → b b → c a → c a → f a || e e || d
P1
P2
P3
a b c
d
e
f g h
Al recibir p un mensaje, incrementa en 1 Vp[P] y además ∀i, 1<i<N,
Vp[1] = max (Vp[i], Vm[i])
[2,0,0]
[0,0,1]
[1,0,0]
[3,0,0] [3,0,1]
[0,0,1]
[2,2,0]
[2,2,3]](https://image.slidesharecdn.com/tiempocausalidadyestadoglobal-210726142035/85/Tiempo-causalidad-y-estado-global-68-320.jpg)
![69
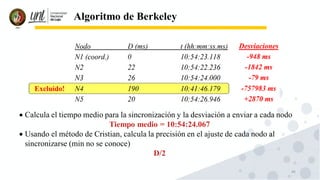
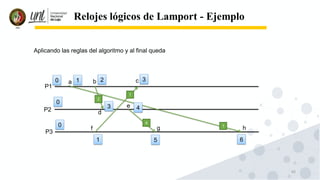
Vectores de tiempo - Ejemplo
[0,0,0]
[0,0,0]
[0,0,0]
[1,0,0] [2,0,0]
[0,0,1]
[2,1,0] [2,2,0]
[2,2,2]
a → b b → c a → c a → f a || e e || d
P1
P2
P3
a b c
d
e
f g h
Al recibir p un mensaje, incrementa en 1 Vp[P] y además ∀i, 1<i<N,
Vp[1] = max (Vp[i], Vm[i])
[2,0,0]
[0,0,1]
[1,0,0]
[3,0,1]
[2,2,0]
[2,2,3]
[1,0,0] < [2,2,0] a → e
[0,0,1] no < [2,2,0] f || e
[2,2,0] no < [0,0,1]](https://image.slidesharecdn.com/tiempocausalidadyestadoglobal-210726142035/85/Tiempo-causalidad-y-estado-global-69-320.jpg)
 ≥ Vj[i](ej
cj )
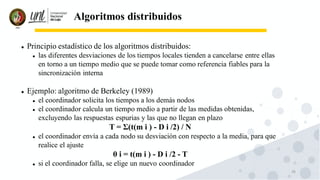
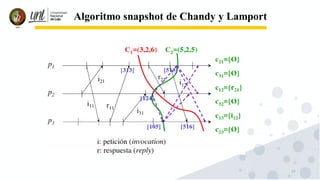
• Puesto que cada proceso posee una visión parcial del sistema, para
construir un corte consistente (y obtener de paso su estado global asociado)
los procesos deben ejecutar un algoritmo distribuido
• Ejemplo: algoritmo de Chandy y Lamport (1985)
• Utilidad: detección de interbloqueos, establecimiento de puntos de
recuperación de un sistema, finalización distribuida](https://image.slidesharecdn.com/tiempocausalidadyestadoglobal-210726142035/85/Tiempo-causalidad-y-estado-global-73-320.jpg)

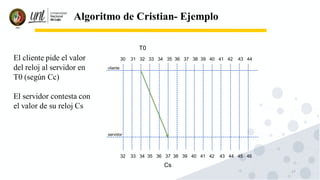
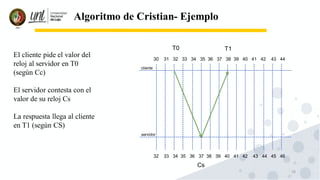
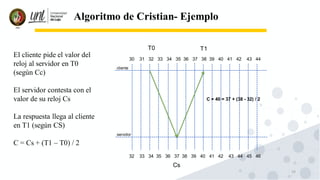
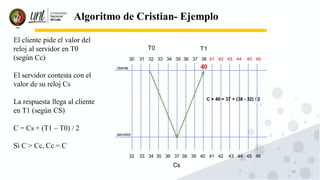
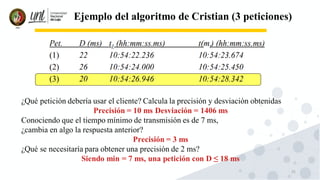
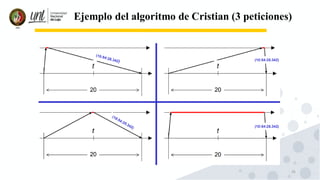
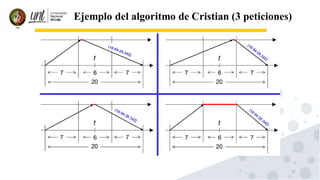
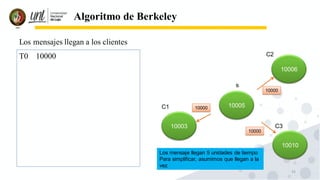
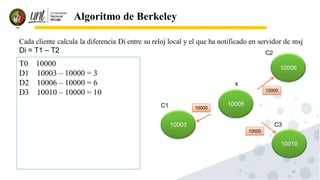
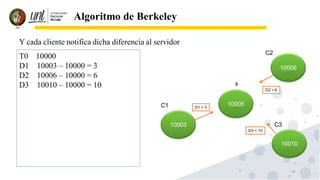
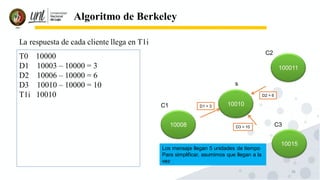
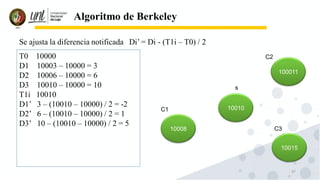
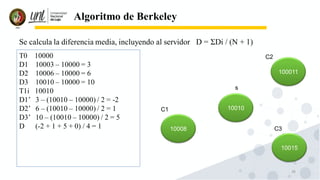
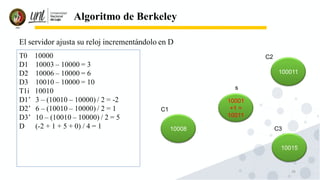
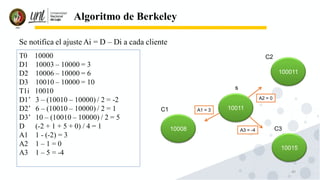
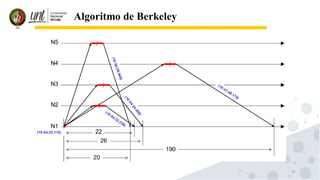
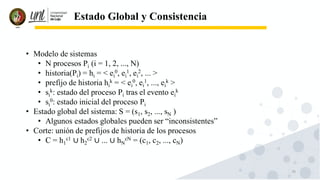
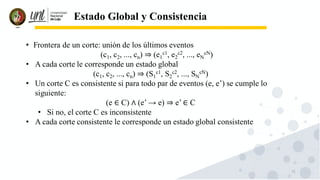
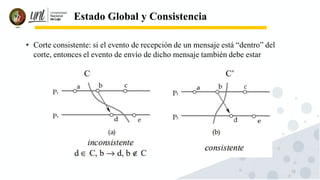
El documento aborda los sistemas distribuidos, centrándose en el tiempo, la causalidad y la consistencia del estado global. Se discuten métodos de sincronización de relojes, como la sincronización externa e interna, y se proponen algoritmos, incluido el de Cristian y el de Berkeley, para lograr un tiempo cohesivo entre nodos. Se enfatiza la inexactitud inherente en los relojes y la complejidad de mantener la consistencia en sistemas donde los estados se distribuyen entre múltiples nodos.



![Control de Flujo [Telecomunicaciones]](https://cdn.slidesharecdn.com/ss_thumbnails/telecomunicaciones-131109151712-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



























































