Descargado 52 veces
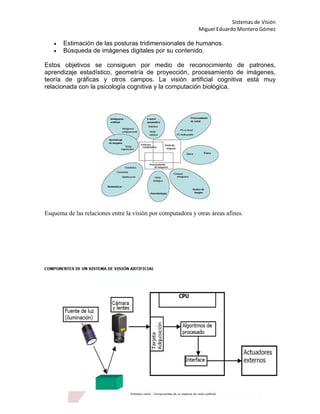



Este documento describe los elementos básicos de un sistema de visión, incluyendo cámaras, iluminación, lentes y software de procesamiento de imágenes. También discute aplicaciones industriales comunes como inspección, medición, guiado y identificación. Además, explica cómo la visión artificial puede usarse en sistemas robóticos para mejorar su flexibilidad y adaptación al entorno.














































