⭐⭐⭐⭐⭐ SOLUCIÓN EVALUACIÓN SISTEMAS DIGITALES 1, 1er Parcial (2020 PAO 1)

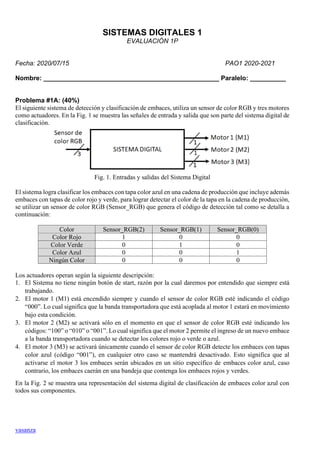
Problema #1A: (40%) El siguiente sistema de detección y clasificación de embaces, utiliza un sensor de color RGB y tres motores como actuadores. En la Fig. 1 se muestra las señales de entrada y salida que son parte del sistema digital de clasificación. El sistema logra clasificar los embaces con tapa color azul en una cadena de producción que incluye además embaces con tapas de color rojo y verde, para lograr detectar el color de la tapa en la cadena de producción, se utilizar un sensor de color RGB (Sensor_RGB) que genera el código de detección tal como se detalla a continuación: Los actuadores operan según la siguiente descripción: 1. El Sistema no tiene ningún botón de start, razón por la cual daremos por entendido que siempre está trabajando. 2. El motor 1 (M1) está encendido siempre y cuando el sensor de color RGB esté indicando el código “000”. Lo cual significa que la banda transportadora que está acoplada al motor 1 estará en movimiento bajo esta condición. 3. El motor 2 (M2) se activará sólo en el momento en que el sensor de color RGB esté indicando los códigos: “100” o “010” o “001”. Lo cual significa que el motor 2 permite el ingreso de un nuevo embace a la banda transportadora cuando se detectar los colores rojo o verde o azul. 4. El motor 3 (M3) se activará únicamente cuando el sensor de color RGB detecte los embaces con tapas color azul (código “001”), en cualquier otro caso se mantendrá desactivado. Esto significa que al activarse el motor 3 los embaces serán ubicados en un sitio específico de embaces color azul, caso contrario, los embaces caerán en una bandeja que contenga los embaces rojos y verdes. En la Fig. 2 se muestra una representación del sistema digital de clasificación de embaces color azul con todos sus componentes. Presentar: a) La tabla de verdad donde se describe el funcionamiento completo del sistema digital de clasificación de embaces color azul. b) Utilizando mapas de Karnaugh (MK) encontrar la expresión booleana minimizada que describe el funcionamiento de cada una de las tres salidas: motor 1 (M1), motor 2 (M2) y motor 3 (M3). Nota: En la cadena de producción únicamente existen embaces con tapas color rojo, verde y azul. Esto significa que el sensor de color RGB nunca indicará ningún código diferente a los descritos en el planteamiento del problema.

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a ⭐⭐⭐⭐⭐ SOLUCIÓN EVALUACIÓN SISTEMAS DIGITALES 1, 1er Parcial (2020 PAO 1)
Similar a ⭐⭐⭐⭐⭐ SOLUCIÓN EVALUACIÓN SISTEMAS DIGITALES 1, 1er Parcial (2020 PAO 1) (20)
Más de Victor Asanza
Más de Victor Asanza (20)
Último
Último (20)
⭐⭐⭐⭐⭐ SOLUCIÓN EVALUACIÓN SISTEMAS DIGITALES 1, 1er Parcial (2020 PAO 1)
- 1. vasanza SISTEMAS DIGITALES 1 EVALUACIÓN 1P Fecha: 2020/07/15 PAO1 2020-2021 Nombre: _________________________________________________ Paralelo: __________ Problema #1A: (40%) El siguiente sistema de detección y clasificación de embaces, utiliza un sensor de color RGB y tres motores como actuadores. En la Fig. 1 se muestra las señales de entrada y salida que son parte del sistema digital de clasificación. Fig. 1. Entradas y salidas del Sistema Digital El sistema logra clasificar los embaces con tapa color azul en una cadena de producción que incluye además embaces con tapas de color rojo y verde, para lograr detectar el color de la tapa en la cadena de producción, se utilizar un sensor de color RGB (Sensor_RGB) que genera el código de detección tal como se detalla a continuación: Color Sensor_RGB(2) Sensor_RGB(1) Sensor_RGB(0) Color Rojo 1 0 0 Color Verde 0 1 0 Color Azul 0 0 1 Ningún Color 0 0 0 Los actuadores operan según la siguiente descripción: 1. El Sistema no tiene ningún botón de start, razón por la cual daremos por entendido que siempre está trabajando. 2. El motor 1 (M1) está encendido siempre y cuando el sensor de color RGB esté indicando el código “000”. Lo cual significa que la banda transportadora que está acoplada al motor 1 estará en movimiento bajo esta condición. 3. El motor 2 (M2) se activará sólo en el momento en que el sensor de color RGB esté indicando los códigos: “100” o “010” o “001”. Lo cual significa que el motor 2 permite el ingreso de un nuevo embace a la banda transportadora cuando se detectar los colores rojo o verde o azul. 4. El motor 3 (M3) se activará únicamente cuando el sensor de color RGB detecte los embaces con tapas color azul (código “001”), en cualquier otro caso se mantendrá desactivado. Esto significa que al activarse el motor 3 los embaces serán ubicados en un sitio específico de embaces color azul, caso contrario, los embaces caerán en una bandeja que contenga los embaces rojos y verdes. En la Fig. 2 se muestra una representación del sistema digital de clasificación de embaces color azul con todos sus componentes.
- 2. vasanza Fig. 2. Sistema digital de clasificación completo Presentar: a) La tabla de verdad donde se describe el funcionamiento completo del sistema digital de clasificación de embaces color azul. Sensor_RGB(2) Sensor_RGB(1) Sensor_RGB(0) M3 M2 M1 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 b) Utilizando mapas de Karnaugh (MK) encontrar la expresión booleana minimizada que describe el funcionamiento de cada una de las tres salidas: motor 1 (M1), motor 2 (M2) y motor 3 (M3). Nota: En la cadena de producción únicamente existen embaces con tapas color rojo, verde y azul. Esto significa que el sensor de color RGB nunca indicará ningún código diferente a los descritos en el planteamiento del problema.
- 3. vasanza Resolución: a) Tabla de verdad Sensor_RGB(2) Sensor_RGB(1) Sensor_RGB(0) M3 M2 M1 0 0 0 0 0 1 0 0 1 1 1 0 0 1 0 0 1 0 0 1 1 φ φ φ 1 0 0 0 1 0 1 0 1 φ φ φ 1 1 0 φ φ φ 1 1 1 φ φ φ b) Mapas de Karnaught M3: Sensor_RGB(0)Sensor_RGB(2),Sensor_RGB(1) 00 01 11 10 0 0 0 φ 0 1 1 φ φ φ M3 = Sensor_RGB(0) M2: Sensor_RGB(0)Sensor_RGB(2),Sensor_RGB(1) 00 01 11 10 0 0 1 φ 1 1 1 φ φ φ M2 = Sensor_RGB(0) + Sensor_RGB(1) + Sensor_RGB(2) M1: Sensor_RGB(0)Sensor_RGB(2),Sensor_RGB(1) 00 01 11 10 0 1 0 φ 0 1 0 φ φ φ M1 = 𝐒𝐞𝐧𝐬𝐨𝐫_𝐑𝐆𝐁(𝟐)̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅. 𝐒𝐞𝐧𝐬𝐨𝐫_𝐑𝐆𝐁(𝟏)̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅. 𝐒𝐞𝐧𝐬𝐨𝐫_𝐑𝐆𝐁(𝟎)̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅
- 4. vasanza Problema #1B: (40%) El siguiente sistema de detección y clasificación de embaces, utiliza un sensor de color RGB y cuatro motores como actuadores. En la Fig. 1 se muestra las señales de entrada y salida que son parte del sistema digital de clasificación. Fig. 1. Entradas y salidas del Sistema Digital El sistema logra clasificar los embaces con tapa color rojo y verde en una cadena de producción que incluye además embaces con tapas de color azul. Para lograr detectar el color de la tapa en la cadena de producción, se utilizar un sensor de color RGB (Sensor_RGB) que genera el código de detección tal como se detalla a continuación: Color Sensor_RGB(2) Sensor_RGB(1) Sensor_RGB(0) Color Rojo 1 0 0 Color Verde 0 1 0 Color Azul 0 0 1 Ningún Color 0 0 0 Los actuadores (motores) operan según la siguiente descripción: 5. El Sistema no tiene ningún botón de start, razón por la cual daremos por entendido que siempre está trabajando. 6. El motor 1 (M1) está encendido siempre y cuando el sensor de color RGB esté indicando el código “000”. Lo cual significa que la banda transportadora que está acoplada al motor 1 se detendrá cuando el sensor RGB detecte uno de los siguientes códigos: “100” o “010” o “001” 7. El motor 2 (M2) se activará sólo en el momento en que el sensor de color RGB esté indicando los códigos: “100” o “010” o “001”. Lo cual significa que el motor 2 permite el ingreso de un nuevo embace a la banda transportadora cuando se detectar los colores rojo o verde o azul. 8. El motor 3 (M3) se activará únicamente cuando el sensor de color RGB detecte los embaces con tapas color verde (código “010”), en cualquier otro caso se mantendrá desactivado. Esto significa que al activarse el motor 3 los embaces serán ubicados en un sitio específico de embaces color verde. 9. El motor 4 (M4) se activará únicamente cuando el sensor de color RGB detecte los embaces con tapas color rojo (código “100”), en cualquier otro caso se mantendrá desactivado. Esto significa que al activarse el motor 4 los embaces serán ubicados en un sitio específico de embaces color rojo. 10. Cuando el sensor RGB detecte los embaces de color azul (código “001”), estos caerán a la bandeja de embaces azules debido a que los motores M3 y M4 no se habrán activado. En la Fig. 2 se muestra una representación del sistema digital de clasificación de embaces con todos sus componentes.
- 5. vasanza Fig. 2. Sistema digital de clasificación completo Presentar: c) La tabla de verdad donde se describe el funcionamiento completo del sistema digital de clasificación de embaces. Sensor_RGB(2) Sensor_RGB(1) Sensor_RGB(0) M4 M3 M2 M1 0 0 0 0 0 1 0 1 0 0 1 1 1 0 0 1 0 1 1 1 0 1 1 1 d) Utilizando mapas de Karnaugh (MK) encontrar la expresión booleana minimizada que describe el funcionamiento de cada una de las cuatro salidas: motor 1 (M1), motor 2 (M2), motor 3 (M3) y motor 4 (M4). Nota: En la cadena de producción únicamente existen embaces con tapas color rojo, verde y azul. Esto significa que el sensor de color RGB nunca indicará ningún código diferente a los descritos en el planteamiento del problema.
- 6. vasanza Resolución: a) Table de verdad Sensor_RGB(2) Sensor_RGB(1) Sensor_RGB(0) M4 M3 M2 M1 0 0 0 0 0 0 1 0 0 1 0 0 1 0 0 1 0 0 1 1 0 0 1 1 φ φ φ φ 1 0 0 1 0 1 0 1 0 1 φ φ φ φ 1 1 0 φ φ φ φ 1 1 1 φ φ φ φ b) Mapas de Karnaught M4: Sensor_RGB(0)Sensor_RGB(2),Sensor_RGB(1) 00 01 11 10 0 0 0 φ 1 1 0 φ φ φ M4 = Sensor_RGB(2) M3: Sensor_RGB(0)Sensor_RGB(2),Sensor_RGB(1) 00 01 11 10 0 0 1 φ 0 1 0 φ φ φ M3 = Sensor_RGB(1) M2: Sensor_RGB(0)Sensor_RGB(2),Sensor_RGB(1) 00 01 11 10 0 0 1 φ 1 1 1 φ φ φ M2 = Sensor_RGB(0) + Sensor_RGB(1) + Sensor_RGB(2) M1: Sensor_RGB(0)Sensor_RGB(2),Sensor_RGB(1) 00 01 11 10 0 1 0 φ 0 1 0 φ φ φ M1 = 𝐒𝐞𝐧𝐬𝐨𝐫_𝐑𝐆𝐁(𝟐)̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅. 𝐒𝐞𝐧𝐬𝐨𝐫_𝐑𝐆𝐁(𝟏)̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅. 𝐒𝐞𝐧𝐬𝐨𝐫_𝐑𝐆𝐁(𝟎)̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅̅