
Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Planos para la realización del carro seguidor de línea
Similar a Planos para la realización del carro seguidor de línea (20)
Último
Último (16)
Planos para la realización del carro seguidor de línea
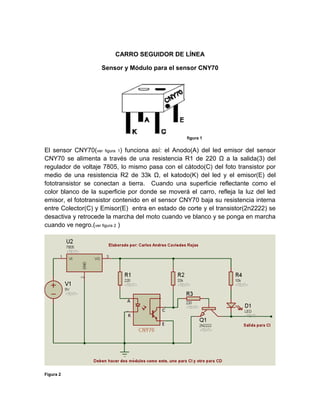
- 1. CARRO SEGUIDOR DE LÍNEA Sensor y Módulo para el sensor CNY70 figura 1 El sensor CNY70(ver figura 1) funciona así: el Anodo(A) del led emisor del sensor CNY70 se alimenta a través de una resistencia R1 de 220 Ω a la salida(3) del regulador de voltaje 7805, lo mismo pasa con el cátodo(C) del foto transistor por medio de una resistencia R2 de 33k Ω, el katodo(K) del led y el emisor(E) del fototransistor se conectan a tierra. Cuando una superficie reflectante como el color blanco de la superficie por donde se moverá el carro, refleja la luz del led emisor, el fototransistor contenido en el sensor CNY70 baja su resistencia interna entre Colector(C) y Emisor(E) entra en estado de corte y el transistor(2n2222) se desactiva y retrocede la marcha del moto cuando ve blanco y se ponga en marcha cuando ve negro.(ver figura 2 ) Figura 2
- 2. Regulador de voltaje 7805 Figura 3 Este regulador tiene en su pin 1 la entrade de voltaje, en este caso la entrada de la batería de 9 voltios, el pin 2 se conecta a tierra y el pin 3 es la salida regulada de 5 voltios(ver figura 3). Funcionamiento del carro Los sensores irán dispuestos mirando al suelo y a unos 2 o 3 mm de separación desde el suelo a la superficie del sensor y la separación entre ambos sensores será para que quede dentro de la línea negra que vayamos a usar como trayectoria. Cuando empiece a funcionar los dos sensores sobre la línea negra de la trayectoria, y tenga los dos sensores viendo negro, los 2 motores estarán en marcha con lo que el prototipo avanzara en línea recta, ahora bien si él llega a una curva y supongamos que el sensor izquierdo sale de la línea negra entonces provocara que el motor del lado contrario (motor derecho) se active en sentido contrario con lo cual el prototipo girara a la derecha entrando de este modo en la línea negra otra vez y del mismo modo girará para el lado derecho.
- 3. Nota: Los motores deben ser motoreductores de corriente continua y sino habrá que fabricarles una reductora de velocidad, entre más grandes sean las ruedas, más velocidad alcanzará, deben tener cuidado de no utilizar un diámetro muy grande para que el carro no pierda la línea en las curvas. Acondicionamiento de señal(40106) figura 3.1 Para que los sensores censen en color negro debemos invertir la señal de los sensores con una compuerta, utilizamos el integrado 40106 que además de ser inversora es un disparador Smith Trigger que mediante la entrada de un voltaje entre el rango de 0V a 5V este nos convierte esta señal en una señal digital pura. Puente-H El driver para motores L293B que maneja señales de control para nuestro caso son los sensores y a partir de esta se puede controlar hasta 2 motores y su sentido de giro a través de un puente H. Este integrado en su pin1 y pin9 maneja el Enable (habilitador), si es un 1 lógico habilita el canal para que el motor gire pero si es un 0 lógico inhabilita el canal evitando que el motor gire(ver Figura 4). Figura 4
- 4. Módulo para el Puente-H Montaje en protoboard
- 5. En los anteriores montajes para protoboard falta un módulo de sensor como el de la figura2 que debe ir conectado al pin2 del puente-H(L293B), además deben construir un tercer módulo de sensor óptico como el de la figura2 y la salida de este sensor deben conectarla al pin 1 y 9 del puente-H(L293B), este sensor será el encargado de desactivar los dos motores cuando el carro pase sobre la línea de meta. Elaborado por: Carlos Andrés Caviedes Rojas Esp. Instrumentación Industrial Maestrando en Ing. Electrónica