Descargar como PDF, PPTX



















]2(1[
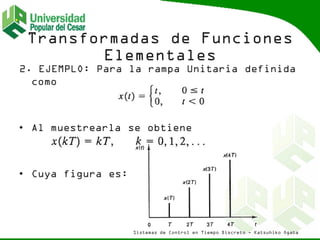
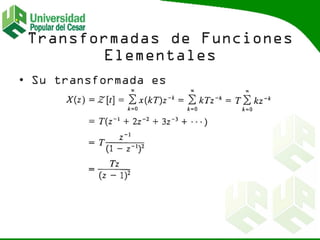
z
z
z
ztZzTtZ
1
4
1
44
11
1
)](1[)]4(1[
z
z
z
ztZzTtZ](https://image.slidesharecdn.com/unidad2-control2-130807170527-phpapp02/85/Unidad-2-control-2-FUNCION-DE-TRANSFERENCIA-PULSO-25-320.jpg)









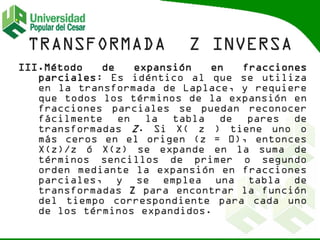
![Método computacional: enfoque en
Matlab:
Delta de Kronecker: dk=[1 zeros(1,N)]
%donde N es el número de términos
mas uno, que se necesitan.
num=[0 0.4673 -0.3393]; %numerador
den=[1 -1.5327 0.6607]; %denominador
dk=[1 zeros(1,50)]; %delta para 51
valores
X=filter(num,den,dk) % entrega la
secuencia de 51 valores](https://image.slidesharecdn.com/unidad2-control2-130807170527-phpapp02/85/Unidad-2-control-2-FUNCION-DE-TRANSFERENCIA-PULSO-36-320.jpg)




















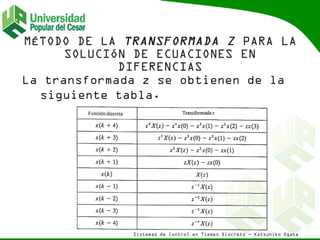
![Considere un sistema en el tiempo discreto,
lineal e invariante en el tiempo
caracterizado por la siguiente ecuación en
diferencias
Donde u(k) y x(k) son la entrada y salida
respectivamente al sistema, de la k-ésima
iteración. Definiendo la transformada como
Z[x(k)]=X(z) entonces x(k+1), x(k+2),
x(k+3),… y x(k-1), x(k-2), x(k-3),… se puede
expresar en términos de X(z) y de las
condiciones iniciales.](https://image.slidesharecdn.com/unidad2-control2-130807170527-phpapp02/85/Unidad-2-control-2-FUNCION-DE-TRANSFERENCIA-PULSO-58-320.jpg)









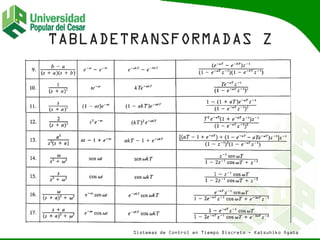
La transformada Z es una herramienta análoga a la transformada de Laplace para sistemas de tiempo discreto. Se define la transformada Z de una secuencia discreta x(k) y de una función muestreada x(kT). El documento presenta ejemplos de cálculo de transformadas Z para diferentes funciones y desarrolla propiedades como linealidad y traslación. También explica métodos para calcular la transformada Z inversa como división directa, uso de la función delta de Kronecker y expansión en fracciones parciales.









































































