Nonlinear Programming, Solved Problem
•
0 recomendaciones•3,065 vistas

Problema resuelto acerca de programación no lineal.

Recomendados
Más contenido relacionado
Destacado
Similar a Nonlinear Programming, Solved Problem
Similar a Nonlinear Programming, Solved Problem (20)
Más de Edgar Mata
Más de Edgar Mata (20)
Último
Último (20)
Nonlinear Programming, Solved Problem
- 1. Nonlinear Programming G. Edgar Mata Ortiz
- 2. Nonlinear Programming •¿Qué es Programación no Lineal? •Es un método para obtener el resultado óptimo con base en un modelo matemático en el que NO todas las relaciones entre variables y constantes pueden expresarse linealmente. Algunas relaciones pueden ser lineales, pero NO todas.
- 3. Nonlinear Programming •Programación lineal •Con la finalidad de comparar, vamos a comentar un ejemplo de programación lineal.
- 4. Nonlinear Programming •Programación lineal •En esta forma de optimización, las relaciones entre variables y constantes son lineales.
- 5. Nonlinear Programming •Ejemplo de programación lineal •Una planta industrial emplea tres máquinas M1, M2 y M3 para fabricar dos artículos A1 y A2. Para la fabricación de A1 se requieren dos horas en la máquina M1, una hora en la M2 y tres horas en la M3; para el producto A2 hace falta una hora en la máquina M1, una hora en la M2 y 5 horas en la M3.
- 6. Nonlinear Programming •Ejemplo de programación lineal •Se dispone de 180 horas en la máquina M1, 110 en la M2 y 480 en la M3. La ganancia obtenida por cada pieza del artículo A1 es de $50 y por cada pieza del artículo A2 es de $40. •¿Cuántas piezas de cada artículo deben fabricarse para que la ganancia sea la máxima posible?
- 7. Nonlinear Programming •Ejemplo de programación lineal •El problema es planteado y se obtiene un modelo en el que todas las expresiones algebraicas son lineales.
- 8. Nonlinear Programming •Ejemplo de programación lineal •Incluso la función objetivo es lineal.
- 9. Nonlinear Programming •La solución se obtiene resolviendo sistemas de ecuaciones lineales
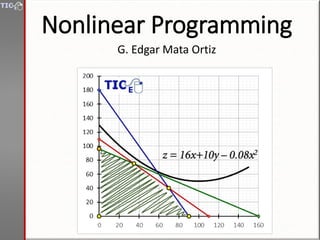
- 10. Nonlinear Programming •Un caso típico de programación no lineal se presenta cuando las restricciones son lineales, pero la función objetivo no lo es. •Por ejemplo: •¿Qué sucede si, con los datos del problema anterior, la función objetivo es cuadrática? •z = 16x+10y – 0.08x2
- 11. Nonlinear Programming •El modelo del problema quedaría: •Maximizar: z = 16x+10y – 0.08x2 •Sujeto a las restricciones: • 2x + y ≤ 180 • x + y ≤ 110 • 3x + 5y ≤ 480 • x≥0, y ≥ 0
- 12. Nonlinear Programming •Una buena forma de comprender el problema consiste en trazar la gráfica de la función objetivo sobre el mismo plano en el que se encuentran las restricciones. •z = 16x+10y – 0.08x2 Para poder trazar la gráfica, asigna un valor de z = 1,300. Observa el comportamiento de la curva obtenida
- 13. Nonlinear Programming •Graficar la función objetivo: •z = 16x+10y – 0.08x2 •Es necesario despejar la variable independiente y, (considerando z = 1,300). 16𝑥 + 10𝑦 − 0.08𝑥2 = 1300 10𝑦 = −16𝑥 + 0.08𝑥2 + 1300 𝑦 = −16𝑥 + 0.08𝑥2 + 1300 10 𝑦 = −1.6𝑥 + 0.008𝑥2 + 130
- 14. Nonlinear Programming • Tabulación para graficar la función objetivo: 𝑦 = −1.6𝑥 + 0.008𝑥2 + 130 x y 0 −1.6𝑥 + 0.008𝑥2 + 130 = −1.6(0) + 0.008(0)2+130 = 130 20 −1.6𝑥 + 0.008𝑥2 + 130 = −1.6(20) + 0.008(20)2+130 = 101.2 40 −1.6𝑥 + 0.008𝑥2 + 130 = −1.6(40) + 0.008(40)2 +130 = 78.8 60 −1.6𝑥 + 0.008𝑥2 + 130 = −1.6(60) + 0.008(60)2 +130 = 80 −1.6𝑥 + 0.008𝑥2 + 130 = −1.6(80) + 0.008(80)2 +130 = 100 −1.6𝑥 + 0.008𝑥2 + 130 = −1.6(100) + 0.008(100)2+130 = 120 −1.6𝑥 + 0.008𝑥2 + 130 = −1.6(120) + 0.008(120)2+130 = 140 −1.6𝑥 + 0.008𝑥2 + 130 = −1.6(140) + 0.008(140)2 +130 =
- 15. Nonlinear Programming •z = 16x+10y – 0.08x2 El área de soluciones factibles no cambia, ya que solamente se modificó la función objetivo, no las restricciones.
- 16. Nonlinear Programming •z = 16x+10y – 0.08x2 A(0, 96) B(0, 0) C(90, 0) D(70, 40) E(35, 75) El área de soluciones factibles no cambia, ya que solamente se modificó la función objetivo pero no las restricciones.
- 17. Nonlinear Programming •z = 16x+10y – 0.08x2 Debido a la curvatura de la función objetivo, la solución óptima no necesariamente se encontrará en un vértice del área de soluciones factibles.
- 18. Nonlinear Programming • ¿Cómo determinar la solución óptima? • ¿Cómo sabemos si existe dicha solución óptima? • En caso de que exista, ¿es única esta solución óptima?
- 19. Nonlinear Programming • Existen muchos tipos de problemas de programación no lineal, dependiendo de las características de las funciones involucradas; restricciones y función objetivo. • Existen varios algoritmos para resolver cada uno de los diferentes tipos de problemas. • El ejemplo planteado recibe el nombre de:
- 20. Nonlinear Programming • Programación cuadrática • Se distingue de la programación lineal porque, aunque tiene restricciones lineales, la función objetivo es cuadrática. • La solución de este tipo de problemas es importante porque numerosas aplicaciones se ajustan al modelo y, muchas otras, se pueden resolver mediante una sucesión de aproximaciones de programación cuadrática.
- 21. Nonlinear Programming • Programación cuadrática • Si se cumplen las condiciones: • Karush – Kuhn – Tucker (KKT) es posible resolver estos problemas mediante una versión modificada del algoritmo simplex. • La modificación al método simplex consiste en agregar una regla de entrada restringida: • Al elegir la variable básica entrante, se excluye cualquier variable no básica cuya variable complementaria sea básica.
- 22. Nonlinear Programming • Uso de software • La mayoría de los algoritmos para resolver problemas de programación lineal forman parte de diversos programas de computadora. • En las siguientes diapositivas se muestra el proceso seguido para determinar la solución óptima empleando la herramienta SOLVER de Excel.
- 23. Nonlinear Programming • Programación cuadrática en Solver de Excel. • El primer paso es introducir los datos de las restricciones en forma de tabla.
- 24. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Agregar los coeficientes de la función objetivo.
- 25. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Agregar los coeficientes de la función objetivo. Coeficientes de x, y.
- 26. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Agregar los coeficientes de la función objetivo. Coeficientes de x, y. Coeficientes de x2, y2.
- 27. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Agregar los coeficientes de la función objetivo. • El coeficiente de y2 es cero, porque la función objetivo no contiene dicho término.
- 28. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Agregar los coeficientes de la función objetivo. • El coeficiente de y2 es cero, porque la función objetivo no contiene dicho término.
- 29. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Elegir celdas para los valores de x, y. Coeficientes de x, y.
- 30. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Elegir celdas para los valores de x, y. Coeficientes de x, y. Coeficientes de x2, y2.
- 31. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Elegir celdas para los valores de x, y. Los valores de x, y se irán cambiando para maximizar la función objetivo Coeficientes de x, y. Coeficientes de x2, y2.
- 32. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Agregar una tabla que, mediante fórmulas, calculará la cantidad de recursos empleados con base en los valores de x, y.
- 33. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Las fórmulas que se emplearán son: • Las celdas C4, C5, C6, D4, D5, D6 hacen referencia a la tabla de datos de las restricciones anotadas en la parte superior de la hoja de Excel
- 34. Nonlinear Programming • Programación cuadrática en Solver de Excel. • También hace falta una celda en la que se calcula el valor de la función objetivo.
- 35. Nonlinear Programming • Programación cuadrática en Solver de Excel. • Fórmula de la celda que se va a maximizar:
- 36. Nonlinear Programming • Programación cuadrática en Solver de Excel.
- 37. Nonlinear Programming • Una vez que se completa la hoja de Excel con todas las fórmulas, se emplea SOLVER.
- 38. Nonlinear Programming • Datos necesarios para resolver el problema.
- 39. Nonlinear Programming • Datos necesarios para resolver el problema.
- 40. Nonlinear Programming • Solución generada por SOLVER.
- 41. Gracias• https://www.facebook.com/licemata • https://twitter.com/licemata • Twitter: @licemata • http://licmata-math.blogspot.mx/ • http://www.scoop.it/t/mathematics-learning • http://www.spundge.com/@licmata • http://www.slideshare.net/licmata • www.freelibros.org