![Matriz de coordenadas de los nodos y
matriz de conectividades
#Matriz de coordenadas de los nodos
X = np.array([[0,0],
[1,4],
[2,8],
[4,0],
[4,8],
[8,0],
[7,4],
[6,8]]) #cm
#Matriz de conectividades
#Se colocan las numeraciones globales de los nodos en las posiciones locales
MC = np.array([8,3,1,6,5,2,4,7])
1
2
3 4
8
5
6
7](data:image/gif;base64,R0lGODlhAQABAIAAAAAAAP///yH5BAEAAAAALAAAAAABAAEAAAIBRAA7)
Recomendados
Más contenido relacionado
Similar a Convección Difusión con Elementos Finitos.pptx
Similar a Convección Difusión con Elementos Finitos.pptx (20)
Último
Último (20)
Convección Difusión con Elementos Finitos.pptx
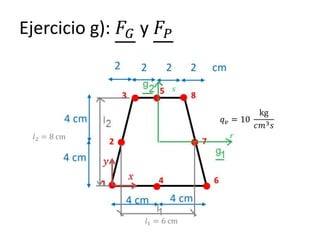
- 1. Ejercicio g): 𝐹𝐺 y 𝐹𝑃 𝑙1 = 6 cm 𝑙2 = 8 cm 𝑟 𝑠 𝑞𝑣 = 10 kg 𝑐𝑚3𝑠 𝑥 𝑦
- 2. Matriz de coordenadas de los nodos y matriz de conectividades #Matriz de coordenadas de los nodos X = np.array([[0,0], [1,4], [2,8], [4,0], [4,8], [8,0], [7,4], [6,8]]) #cm #Matriz de conectividades #Se colocan las numeraciones globales de los nodos en las posiciones locales MC = np.array([8,3,1,6,5,2,4,7]) 1 2 3 4 8 5 6 7
- 3. Funciones de forma Finite Element Procedures, Bathe, página 344 𝐻 = ℎ1 ℎ2 … ℎ8
- 4. Funciones de forma #Funciones de forma def funcion_H(r,s): h8 = 1/2*(1-s**2)*(1+r) h7 = 1/2*(1-r**2)*(1-s) h6 = 1/2*(1-s**2)*(1-r) h5 = 1/2*(1-r**2)*(1+s) h4 = 1/4*(1+r)*(1-s) - h7/2 - h8/2 h3 = 1/4*(1-r)*(1-s) - h6/2 - h7/2 h2 = 1/4*(1-r)*(1+s) - h5/2 - h6/2 h1 = 1/4*(1+r)*(1+s) - h5/2 - h8/2 H = np.array([h1,h2,h3,h4,h5,h6,h7,h8]) return H
- 5. Derivadas de las funciones de forma Se colocan las derivadas de las funciones de forma respecto de las coordenadas locales en una matriz como la siguiente: 𝑑𝐻 = 𝜕ℎ1 𝜕𝑟 𝜕ℎ2 𝜕𝑟 … 𝜕ℎ8 𝜕𝑟 𝜕ℎ1 𝜕𝑠 𝜕ℎ2 𝜕𝑠 … 𝜕ℎ8 𝜕𝑠
- 6. Derivadas de las funciones de forma #Derivadas de las funciones de forma def funcion_dH(r,s): h8r = 1/2*(1-s**2) h8s = -s*(1+r) h7r = -r*(1-s) h7s = -1/2*(1-r**2) h6r = -1/2*(1-s**2) h6s = -s*(1-r) h5r = -r*(1+s) h5s = 1/2*(1-r**2) h4r = 1/4*(1-s) - h7r/2 - h8r/2 h4s = -1/4*(1+r) - h7s/2 - h8s/2 h3r = -1/4*(1-s) - h6r/2 - h7r/2 h3s = -1/4*(1-r) - h6s/2 - h7s/2 h2r = -1/4*(1+s) - h5r/2 - h6r/2 h2s = 1/4*(1-r) - h5s/2 - h6s/2 h1r = 1/4*(1+s) - h5r/2 - h8r/2 h1s = 1/4*(1+r) - h5s/2 - h8s/2 dH = np.array([[h1r,h2r,h3r,h4r,h5r,h6r,h7r,h8r], [h1s,h2s,h3s,h4s,h5s,h6s,h7s,h8s]]) return dH
- 7. Matriz jacobiana Las coordenadas globales interpoladas son: 𝑍𝛼 = ℎ𝑖 𝑍𝛼 𝑖 Con 𝑍𝛼 = 𝑥 si 𝛼 = 1, o 𝑍𝛼 = 𝑦 si 𝛼 = 2, teniendo el índice 𝑖 en suma: 𝑖 = 1,2,3, … , 8 La matriz jacobiana de la transformación de coordenadas globales (𝑍𝛼) a locales (𝜃𝑙) es: 𝐽 = 𝜕𝑥 𝜕𝑟 𝜕𝑦 𝜕𝑟 𝜕𝑥 𝜕𝑠 𝜕𝑦 𝜕𝑠 Por lo tanto, se puede intuir que: 𝐽𝑙𝛼 = 𝜕𝑍𝛼 𝜕𝜃𝑙 = 𝜕ℎ𝑖 𝜕𝜃𝑙 𝑍𝛼 𝑖 = 𝑑𝐻𝑙𝑖 𝑍𝛼 𝑖 Coordenada 𝑍𝛼 del nodo 𝑖
- 8. Matriz Jacobiana #Matriz jacobiana def funcion_matrizJ(r,s,X,MC,dH): #Se inicializan las derivadas en cero xr, xs, yr, ys = 0, 0, 0, 0 #Se realizan las sumatorias para las 8 funciones de forma for i in range(8): xr += dH[0][i]*X[int(MC[i]-1)][0] xs += dH[1][i]*X[int(MC[i]-1)][0] yr += dH[0][i]*X[int(MC[i]-1)][1] ys += dH[1][i]*X[int(MC[i]-1)][1] #Se insertan las derivadas en la matriz jacobiana matrizJ = np.array([[xr,yr], [xs,ys]]) return matrizJ
- 9. Matriz B (𝛻𝐻) Sabiendo que la inversa de la matriz jacobiana es: 𝐽 −1 = 𝜕𝑟 𝜕𝑥 𝜕𝑠 𝜕𝑥 𝜕𝑟 𝜕𝑦 𝜕𝑠 𝜕𝑦 Se obtienen las derivadas de las funciones de forma respecto de las coordenadas globales usando la regla de la cadena: 𝜕ℎ𝑖 𝜕𝑍𝛼 = 𝜕ℎ𝑖 𝜕𝜃𝑙 𝜕𝜃𝑙 𝜕𝑍𝛼 = 𝑑𝐻𝑙𝑖 𝐽𝛼𝑙 −1 ⇒ 𝐵 = 𝐽 −1 ⋅ [𝑑𝐻]
- 10. Matriz B #Matriz B (gradiente de H) def funcion_matrizB(matrizJ,dH): #Inversa de la matriz jacobiana matrizJ_inv = np.linalg.inv(matrizJ) #Matriz B B = np.matmul(matrizJ_inv,dH) return B
- 11. Tabla de integración por Gauss- Legendre #Integracion por Gauss-Legendre def intregralGauss(nGauss): #Iniciamos los vectores de pesos y posiciones de Gauss en cero w = np.zeros(int(nGauss)) #pesos r = np.zeros(int(nGauss)) #posiciones #Introducimos los valores de la tabla para cada n if nGauss==1: w[0] = 2 r[0] = 0 elif nGauss==2: r[0] = np.sqrt(1/3) r[1] = -np.sqrt(1/3) w[0] = 1 w[1] = 1 elif nGauss==3: r[0] = 0 r[1] = np.sqrt(3/5) r[2] = -np.sqrt(3/5) w[0] = 8/9 w[1] = 5/9 w[2] = 5/9 elif nGauss==4: r[0] = np.sqrt((3-2*np.sqrt(6/5))/7) r[1] = -np.sqrt((3-2*np.sqrt(6/5))/7) r[2] = np.sqrt((3+2*np.sqrt(6/5))/7) r[3] = -np.sqrt((3+2*np.sqrt(6/5))/7) w[0] = (18+np.sqrt(30))/36 w[1] = (18+np.sqrt(30))/36 w[2] = (18-np.sqrt(30))/36 w[3] = (18-np.sqrt(30))/36 return r,w 𝑤𝑖
- 12. Elección de puntos de Gauss 3 puntos de Gauss en cada dirección
- 13. Pesos de Petrov Se tiene el vector velocidad: v = 2 2 cm s Se calcula su norma: 𝑉 = 22 + 22 = 2 2 cm s Se definen las longitudes características: 𝑙1 = 6 cm ; 𝑙2 = 8 cm Sabiendo que la difusividad es 𝑘 = 0,001 𝑐𝑚2 𝑠 , se calculan los números de Peclet en cada dirección: 𝑃𝑒1 = 𝑣1𝑙1 2𝑘 = 6000 ; 𝑃𝑒2 = 𝑣2𝑙2 2𝑘 = 8000
- 14. Pesos de Petrov Se calculan los coeficientes auxiliares: 𝛼1 = coth 𝑃𝑒1 − 1 𝑃𝑒1 = 5999 6000 𝛼2 = coth 𝑃𝑒2 − 1 𝑃𝑒2 = 7999 6000 Se calcula el tiempo intrínseco: 𝜏 = 𝛼1𝑣1𝑙1 2𝑉2 + 𝛼2𝑣2𝑙2 2𝑉2 = 1,74975 s Finalmente, se calcula el vector de pesos de Petrov: 𝑊 = 𝜏 v ⋅ [𝐵]
- 15. Pesos de Petrov def petrov(r,s,X,MC): #Difusividad k = 0.001 #cm^2/s #Vector velocidad v = np.array([2,2]) #cm/s #Norma del vector velocidad V = np.sqrt(v[0]**2 + v[1]**2) #Longitudes caracteristicas en cada direccion l1 = 6 #cm l2 = 8 #cm #Numero de Peclet en cada direccion Pe1 = v[0]*l1/(2*k) Pe2 = v[1]*l2/(2*k) #Coeficiente alpha α1 = 1/np.tanh(abs(Pe1)) - 1/abs(Pe1) α2 = 1/np.tanh(abs(Pe2)) - 1/abs(Pe2) #Tiempo intrinseco τ = α1*v[0]*l1/(2*V**2) + α2*v[1]*l2/(2*V**2) #Derivadas de las funciones de forma dH = funcion_dH(r,s) #Jacobiana matrizJ = funcion_matrizJ(r,s,X,MC,dH) #Matriz B B = funcion_matrizB(matrizJ,dH) #Vector de pesos de Petrov W = τ*np.matmul(v,B) return W
- 16. Vectores de fuerzas Se calculan los vectores de fuerzas de Galerkin y Petrov locales de acuerdo a las siguientes expresiones: 𝐹𝐺 (𝑒) = 𝑉 𝑞𝑣 𝐻𝑑𝑉 = 𝑒𝑠𝑝 −1 −1 1 1 𝑞𝑣 𝐻(𝑟, 𝑠) 𝐽 (𝑟, 𝑠)𝑑𝑟 𝑑𝑠 𝐹𝑃 (𝑒) = 𝑉 𝑞𝑣 𝑊𝑑𝑉 = 𝑒𝑠𝑝 −1 −1 1 1 𝑞𝑣 𝑊(𝑟, 𝑠) 𝐽 (𝑟, 𝑠)𝑑𝑟 𝑑𝑠 Supongo espesor unitario (𝑒𝑠𝑝 = 1).
- 17. Vectores de fuerzas Integrando numéricamente por Gauss, se tiene: 𝐹𝐺 (𝑒) = 𝑖=1 𝑛 𝑗=1 𝑛 𝑞𝑣 𝑤𝑖𝑤𝑗 𝐻 𝑟𝑖, 𝑠𝑗 𝐽 𝑟𝑖, 𝑠𝑗 𝐹𝑃 (𝑒) = 𝑖=1 𝑛 𝑗=1 𝑛 𝑞𝑣 𝑤𝑖𝑤𝑗 𝑊 𝑟𝑖, 𝑠𝑗 𝐽 𝑟𝑖, 𝑠𝑗 Siendo el número de puntos de Gauss: 𝑛 = 3
- 18. Vectores de fuerzas Finalmente, para obtener los vectores de fuerzas con la numeración global de los nodos, se utiliza la matriz de conectividades: Nodo local Nodo global 𝑖 𝑀𝐶𝑖
- 19. Vectores de fuerzas #Vectores de fuerzas externas de Galerkin y Petrov def vecF(qv,X,MC,nGauss): #Se obtienen los pesos y puntos de Gauss x,w = intregralGauss(nGauss) #Se inicializan los vectores con ceros FGL = np.zeros((8,1)) FPL = np.zeros((8,1)) #Se recorren los puntos de Gauss for i in range(nGauss): for j in range(nGauss): #Posiciones de Gauss r = x[i] s = x[j] #Funciones de forma H = funcion_H(r,s) #Derivadas de las funciones de forma dH = funcion_dH(r,s) #Matriz jacobiana matrizJ = funcion_matrizJ(r,s,X,MC,dH) #Determinante jacobiano J = abs(np.linalg.det(matrizJ)) #Vector de pesos de Petrov W = petrov(r,s,X,MC) #Vector de fuerzas de Galerkin local FGL += w[i]*w[j]*J*qv*np.reshape(H,(8,1)) #Vector de fuerzas de Petrov local FPL += w[i]*w[j]*J*qv*np.reshape(W,(8,1)) #Se inicializan los vectores de fuerzas con orden global FG = np.zeros((8,1)) FP = np.zeros((8,1)) #Se llenan los vectores de fuerzas (ensamble) for l in range(8): FG[int(MC[l])-1] += FGL[l] FP[int(MC[l])-1] += FPL[l] return FG, FP
- 20. Ejecución del código nGauss = 3 FG, FP = vecF(qv,X,MC,nGauss) print(f'FG = {FG}') print(f'FP = {FP}') print(f'F = {FG+FP}') FG = [[-35.55555556] [160. ] [-44.44444444] [177.77777778] [142.22222222] [-35.55555556] [160. ] [-44.44444444]] FP = [[ -81.655] [-139.98 ] [ -11.665] [-186.64 ] [ 93.32 ] [ 11.665] [ 233.3 ] [ 81.655]] F = [[-117.21055556] [ 20.02 ] [ -56.10944444] [ -8.86222222] [ 235.54222222] [ -23.89055556] [ 393.3 ] [ 37.21055556]]
- 21. Resultados 𝐹𝐺 = −35.55555556 160 −44.44444444 177.77777778 142.22222222 −35.55555556 160 −44.44444444 kg ; 𝐹𝑃 = −81.655 −139.98 −11.665 −186.64 93.32 11.665 233.3 81.655 kg