
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Leva seguidor lineal piñón-cremallera
Similar a Leva seguidor lineal piñón-cremallera (20)
Más de Arturo Iglesias Castro
Más de Arturo Iglesias Castro (20)
Último
Último (20)
Leva seguidor lineal piñón-cremallera
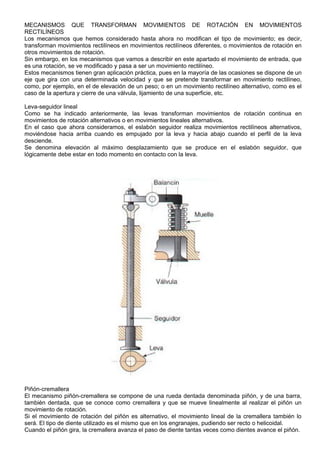
- 1. MECANISMOS QUE TRANSFORMAN MOVIMIENTOS DE ROTACIÓN EN MOVIMIENTOS RECTILÍNEOS Los mecanismos que hemos considerado hasta ahora no modifican el tipo de movimiento; es decir, transforman movimientos rectilíneos en movimientos rectilíneos diferentes, o movimientos de rotación en otros movimientos de rotación. Sin embargo, en los mecanismos que vamos a describir en este apartado el movimiento de entrada, que es una rotación, se ve modificado y pasa a ser un movimiento rectilíneo. Estos mecanismos tienen gran aplicación práctica, pues en la mayoría de las ocasiones se dispone de un eje que gira con una determinada velocidad y que se pretende transformar en movimiento rectilíneo, como, por ejemplo, en el de elevación de un peso; o en un movimiento rectilíneo alternativo, como es el caso de la apertura y cierre de una válvula, lijamiento de una superficie, etc. Leva-seguidor lineal Como se ha indicado anteriormente, las levas transforman movimientos de rotación continua en movimientos de rotación alternativos o en movimientos lineales alternativos. En el caso que ahora consideramos, el eslabón seguidor realiza movimientos rectilíneos alternativos, moviéndose hacia arriba cuando es empujado por la leva y hacia abajo cuando el perfil de la leva desciende. Se denomina elevación al máximo desplazamiento que se produce en el eslabón seguidor, que lógicamente debe estar en todo momento en contacto con la leva. Piñón-cremallera El mecanismo piñón-cremallera se compone de una rueda dentada denominada piñón, y de una barra, también dentada, que se conoce como cremallera y que se mueve Iinealmente al realizar el piñón un movimiento de rotación. Si el movimiento de rotación del piñón es alternativo, el movimiento lineal de la cremallera también lo será. El tipo de diente utilizado es el mismo que en los engranajes, pudiendo ser recto o helicoidal. Cuando el piñón gira, la cremallera avanza el paso de diente tantas veces como dientes avance el piñón.
- 2. Este mecanismo se utiliza, por ejemplo, en el sistema de dirección de los automóviles y para subir o bajar un taladro de columna vertical. Mecanismo de tornillo-tuerca El mecanismo de tornillo-tuerca sirve, además de para convertir un movimiento de rotación en uno lineal, como transformador de fuerzas o como elemento fijador. El tornillo es un cilindro provisto en su exterior de rosca; y la tuerca, un cilindro hueco con rosca en su interior. Tanto la rosca del tornillo como la de la tuerca están formadas por una pieza denominada filete, que se encuentra enrollada en forma de hélice en el cilindro, por su parte exterior en el caso del tornillo, o por la parte interior en el caso de la tuerca. El filete puede tener diferentes formas: - Rectangular - Triangular - Trapezoidal
- 3. L a s r o s c a s cuadradas se usan en m e c a n i s m o s d e movimiento, y las triangulares para fijación. Las roscas trapezoidales se pueden utilizar tanto para mecanismos de movimiento como para fijación. Existen otros tipos de roscas, como por ejemplo las de filete de forma redondeada de las bombillas, pero las más comunes son las anteriores. La distancia entre dos puntos iguales de dos filetes consecutivos medida sobre una generatriz se denomina paso. En un mismo tornillo puede haber más de una entrada; es decir, más de un filete enrollado. En el caso de que haya dos entradas, se disponen a 1800 y si hay 3 a 1200. Se denomina avance a la distancia lineal que recorre un elemento roscado cuando se le hace girar una vuelta. En el caso de que haya varias entradas se comprende fácilmente que el avance sea: Avance = número de entradas x paso La pareja tornillo-tuerca se puede utilizar para convertir movimientos de rotación en movimientos rectilíneos, de varias formas; una de ellas es la representada, a modo de ejemplo, en la figura de la página siguiente.