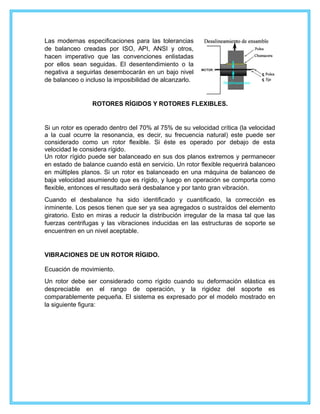
Este documento trata sobre el balanceo de rotores y elementos rotativos. Explica conceptos como desbalance, rotores rígidos y flexibles, y su tolerancia. Describe los métodos de balanceo estático y dinámico en uno y dos planos. Finalmente, presenta ecuaciones para modelar las vibraciones de rotores rígidos y flexibles.






![
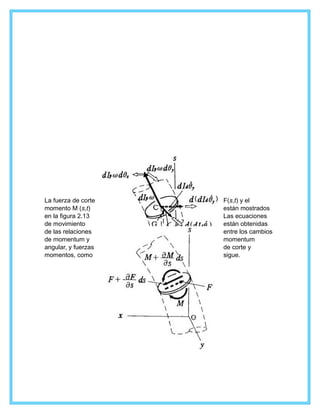
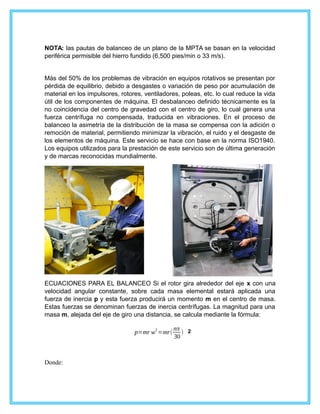
P es la fuerza de inercia centrífuga en [N];
m la masa en [kg];
r el radio de giro en[m];
w la velocidad angular en [s-1];
n el número de revoluciones por minuto.
El signo del vector indica que la fuerza de inercia está dirigida, en la misma dirección del
radio, a partir del eje de rotación x.
4.3 BALANCEO DINÁMICO EN UNO Y DOS PLANOS POR EL MÉTODO DE
COEFICIENTES DE INFLUENCIA.
Método de Coeficientes de Influencia para Balanceo en un Plano El método
tradicional de balanceo en un plano por coeficientes de influencia utiliza los datos
de lectura de vibración del rotor en su condición de desbalance original (“tal cual”)
y la lectura correspondiente a una corrida con peso de prueba. En este caso los
datos son los que se muestran en la Tabla No.1.](https://image.slidesharecdn.com/307274397-unidad-4-vibraciones-170123011726/85/307274397-unidad-4-vibraciones-13-320.jpg)











![Evaluacion de la_severidad_vibratoria_(tutorial)[1]](https://cdn.slidesharecdn.com/ss_thumbnails/evaluaciondelaseveridadvibratoriatutorial1-140411215552-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)















































