
Recomendados
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Estabilidad de sistemas discretos
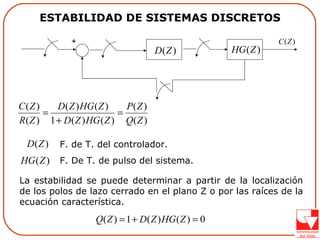
- 1. ESTABILIDAD DE SISTEMAS DISCRETOS La estabilidad se puede determinar a partir de la localización de los polos de lazo cerrado en el plano Z o por las raíces de la ecuación característica. + F. de T. del controlador. F. De T. de pulso del sistema.
- 2. De la siguiente forma: 1. El sistema es estable, si los polos de lazo cerrado las raíces de la ecuación característica quedan localizados dentro del círculo unitario en el plano Z. 1 -1 Región Inestable 2. Si un polo simple está ubicado en Z=1 o en Z=-1, el sistema es marginalmente estable, lo mismo sucede si un par de polos conjugados complejos está sobre el círculo unitario. Polos múltiples localizados sobre el círculo unitario dan como resultado un sistema inestable. 3. Los ceros de lazo cerrado no afectan la estabilidad del sistema y pueden estar ubicados en cualquier parte del plano Z.
- 3. CRITERIO DE ESTABILIDAD DE JURY Método sencillo que determina si algunas de las raíces de la ecuación característica están sobre o fuera del circulo unitario, sin necesidad de encontrar las raíces de Q(Z). Para aplicar el criterio de JURY se considera la ecuación característica de la siguiente forma: Donde todos los coeficientes son reales y b n > 0.
- 4. La tabla de JURY queda conformada así. J Fila Z 0 Z 1 Z 2 .. Z n-j Z n-1 Z m 0 2J+1=1 b 0 b 1 b 2 b n-J b n-1 b n 2J+2=2 b m b n-1 b n-2 b J b 1 b 0 1 2J+1=3 C 0 C 1 C 2 C n-J C n-1 2J+2=4 C n-1 C n-2 C n-3 C J C 0 2 2J+1=5 d 0 d 1 d 2 d n-2 2J+2=6 D n-2 d n-3 d n-4 d 0 n-3 2J+1=2n-5 P 0 P 1 P 2 P 3 2J+2=2n-4 P 3 P 2 P 1 P 0 n-2 2J+1=2n-3 V 0 V 1 V 2 2J+2=2n-2 V 2 V 1 V 0
- 5. Donde: Para que Q(Z) = 0, no tenga raíces fuera o sobre el círculo unitario en el plano Z se requiere el cumplimiento de las siguientes condiciones:
- 6. El procedimiento de prueba es el siguiente: Paso 1: Determinar si se cumplen las condiciones 1 y 2. Si no se cumplen el sistema es inestable. Si se cumplen se efectúa el paso 2. Paso 2: Determinar el máximo valor de J 1 , así: Jmax=n-2 Si Jmax=0, no se continúa el procedimiento por que la información del paso 1 es suficiente para determinar la estabilidad del sistema. Paso 3: El máximo número de filas que ha de tener el arreglo está dado por: Fmax = 2Jmax + 1 Paso 4: Se completa el arreglo. A cada fila se le aplica la restricción. Si esta no se cumple, no se continúa, dado que el sistema ya es inestable.