

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Destacado
Destacado (20)
Similar a 16 teórico de sistemas automáticos
Similar a 16 teórico de sistemas automáticos (20)
Más de Luz Torres Saavedra
Más de Luz Torres Saavedra (9)
Último
Último (16)
16 teórico de sistemas automáticos
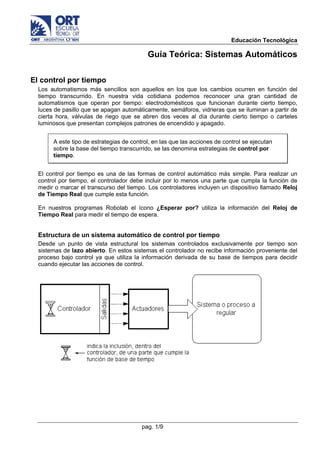
- 1. Educación Tecnológica pag. 1/9 Guía Teórica: Sistemas Automáticos El control por tiempo Los automatismos más sencillos son aquellos en los que los cambios ocurren en función del tiempo transcurrido. En nuestra vida cotidiana podemos reconocer una gran cantidad de automatismos que operan por tiempo: electrodomésticos que funcionan durante cierto tiempo, luces de pasillo que se apagan automáticamente, semáforos, vidrieras que se iluminan a partir de cierta hora, válvulas de riego que se abren dos veces al día durante cierto tiempo o carteles luminosos que presentan complejos patrones de encendido y apagado. A este tipo de estrategias de control, en las que las acciones de control se ejecutan sobre la base del tiempo transcurrido, se las denomina estrategias de control por tiempo. El control por tiempo es una de las formas de control automático más simple. Para realizar un control por tiempo, el controlador debe incluir por lo menos una parte que cumpla la función de medir o marcar el transcurso del tiempo. Los controladores incluyen un dispositivo llamado Reloj de Tiempo Real que cumple esta función. En nuestros programas Robolab el ícono ¿Esperar por? utiliza la información del Reloj de Tiempo Real para medir el tiempo de espera. Estructura de un sistema automático de control por tiempo Desde un punto de vista estructural los sistemas controlados exclusivamente por tiempo son sistemas de lazo abierto. En estos sistemas el controlador no recibe información proveniente del proceso bajo control ya que utiliza la información derivada de su base de tiempos para decidir cuando ejecutar las acciones de control.
- 2. Educación Tecnológica pag. 2/9 Secuencias controladas por tiempo Más allá de aquellos sistemas simples que se mantienen activados por un intervalo de tiempo determinado existen otros sistemas también controlados por tiempo que presentan comportamientos más complejos. En ellos sus salidas van cambiando a medida que pasa el tiempo. Las señales de tránsito brindan una gran variedad de ejemplos de sistemas controlados por tiempo. Desde una simple luz amarilla titilante para avisar acerca de una situación riesgosa, hasta un conjunto de semáforos en una avenida, sincronizados en "onda verde". Las bases sobre las que se construye el automatismo son las mismas, sólo cambia la cantidad de actuadores del sistema de control, la cantidad de estados que forman la secuencia y, en consecuencia, la complejidad del programa de control. Analizaremos a continuación el caso de un semáforo simple como representativo de los automatismos cuyo comportamiento presenta una secuencia cíclica de estados por las que pasa el sistema, cada uno de los cuales dura un tiempo determinado. La estructura del sistema es muy simple. Las luces del semáforo constituyen los actuadores, cuya función es regular el tránsito por la calle o avenida donde están instalados. Debido a que solo es necesario encender y apagar dichas luces alcanzará que el controlador disponga de tres salidas digitales para poder manejarlas. Diagrama en bloque de un semáforo simple
- 3. Educación Tecnológica pag. 3/9 Diagramas de estados Al igual que los diagramas de tiempo, los diagramas de estados permiten representar el comportamiento de un sistema. Podemos describir el comportamiento del sistema a partir de enumerar la secuencia de encendido y apagado de las luces. En el caso del semáforo, la secuencia básica se repite indefinidamente. La siguiente figura ilustra tanto las diferentes etapas por las que pasa un semáforo en la ciudad de Buenos Aires como el orden de la secuencia y el hecho de que esta se repita. Secuencia típica de comportamiento de un semáforo (no todos los semáforos presentan exactamente la misma secuencia) A partir de la figura observamos que la secuencia se divide en etapas. llamaremos “estados” a cada una de estas etapas. Cada estado dura un intervalo de tiempo determinado y puede identificarse mediante la combinación de luces correspondiente. En el ejemplo el segundo estado es “roja-amarilla” y el cuarto “amarilla”. Las flechas indican la transición de un estado al siguiente. En este caso cada cambio de estado implica que algunas lámparas se enciendan y otras se apaguen. En nuestro ejemplo, en la transición del segundo al tercer estado se apagan las lámparas roja y amarilla y se enciende la verde. Los diagramas de estado son formas de representación del comportamiento muy útiles para diseñar sistemas automáticos. Los símbolos utilizados para las representaciones son los siguientes: Para representar Usamos el siguiente símbolo Estado Cambio de estado Inicio Fin
- 4. Educación Tecnológica pag. 4/9 Redibujemos el diagrama de estado del comportamiento del semáforo: Diagrama estados semáforo convencional
- 5. Educación Tecnológica pag. 5/9 El control por sensores En numerosos sistemas automáticos se suelen utilizar sensores para detectar ciertos cambios en el entorno, o en el propio sistema, a partir de los cuales se disparan secuencias controladas por tiempo. Mediante sensores es posible, por ejemplo: • detectar una pieza fallada en una línea de producción; • determinar la temperatura de un horno industrial; • detectar la llegada de un robot de transporte a la zona de carga de mercadería; • detectar la presencia de personas en el entorno de una máquina potencialmente peligrosa; Los sensores generan señales que informan sobre el estado de alguna magnitud del sistema a controlar o su entorno. Estas señales ingresan al controlador a través de las entradas. En nuestros programas Robolab el ícono ¿Esperar por? permite utilizar la información de los sensores para programar el comportamiento de los actuadores. Uso de sensores para disparar secuencias automáticas Caso 1: Alarmas En algunos comercios es posible observar el uso de sistemas que avisan la entrada de una persona haciendo sonar una sirena durante un corto período de tiempo. Para detectar el ingreso se utilizan sensores infrarrojos de presencia, similares a los utilizados en sistemas de alarma. Los siguientes diagramas representan la estructura y el comportamiento del sistema.
- 6. Educación Tecnológica pag. 6/9 A diferencia de lo que ocurre con los sistemas controlados por tiempo, en este caso, ciertos cambios de estado suceden a partir de eventos detectados a través de los sensores. Esta información es necesario incluirla en los diagramas que representan la estructura y el funcionamiento de los sistemas. Caso 2: Semáforo por demanda Este tipo de sistemas se utilizan en aquellas calles o avenidas rápidas donde el cruce de peatones no es tan frecuente como en las calles comunes. Estos semáforos permanecen en verde, permitiendo el paso de vehículos, hasta que algún peatón pulsa el botón. En ese momento el semáforo inicia la secuencia que todos conocemos (amarilla roja roja y amarilla Verde). A diferencia del semáforo convencional, este semáforo realiza sólo un ciclo completo cuando alguien pulsa el botón. Es posible encontrar estos semáforos en las avenidas cercanas a los bosques de Palermo.
- 7. Educación Tecnológica pag. 7/9 Uso de sensores para tomar información del propio sistema a controlar. Caso3: Semáforo inteligente Estos sistemas están instalados en algunos de los cruces entre avenidas de alto tránsito y calles con poca circulación. Poseen un sensor que detecta la presencia de los vehículos que circulan por la avenida; el controlador se encarga de contarlos y calcular cuántos pasan durante un período de tiempo. En función de este dato, el controlador toma la decisión de alargar o acortar el estado “verde” del semáforo colocado sobre la avenida. Si hay mucho tránsito el sistema “alarga” la duración del verde; en cambio, si el tránsito es normal, vuelve la duración al valor corriente. Este sistema posee sensores, como el anterior, pero su estructura es diferente. El flujo de información que ingresa al sensor, proviene del propio proceso que se intenta controlar. Se dice que el sistema posee un lazo de realimentación. Semáforo Simple: El sistema no toma información del proceso que intenta controlar; sólo actúa sobre él. controlador semáforo tránsito Semáforo por demanda: El sistema toma información externa que no proviene del proceso que se intenta controlar. Un sensor detecta personas que quieren cruzar. El controlador, con dicha información, actúa sobre tránsito vehicular. controlador semáforo tránsitobotón Semáforo inteligente: El sistema toma información externa mediante un sensor de presencia de vehículos. En este caso la información viene del propio proceso que se intenta controlar. De acuerdo con la intensidad del tránsito el controlador decide alargar o acortar el “estado verde” del semáforo. controlador semáforo tránsitobotón sensor de tránsito
- 8. Educación Tecnológica pag. 8/9 Clasificación de sistemas automáticos Es posible clasificar a los sistemas de control, según su estructura, en “sistemas de lazo abierto” y “sistemas de lazo cerrado”. La diferencia entre las estructuras de ambos tipos de sistemas es que en el sistema de control a lazo cerrado existe un lazo de realimentación. • Sistemas de lazo abierto por tiempo En los sistemas de control por tiempo, los cambios ocurren a intervalos de tiempo u horarios determinados. El controlador ejecuta las acciones de control que producen cambios, en función de la medición de tiempos que realiza internamente a través de sus dispositivos temporizadores (su propio reloj o base de tiempo). Por basarse en información interna del controlador estas acciones son totalmente independientes de lo que está pasando en el sistema; esta independencia entre los eventos que disparan las acciones de control y el proceso bajo control representa la limitación fundamental del control por tiempo. El semáforo simple es un ejemplo de un sistema de control de lazo abierto por tiempo. • Sistemas de lazo abierto con sensores Este tipo de controles automáticos, a diferencia de los llamados controles por tiempo, se caracterizan por poseer elementos sensores que cumplen la función de informar, por ejemplo, si es necesario abrir o cerrar una válvula, activar o desactivar un motor o encender o apagar una lámpara, sin la necesidad de la intervención de una persona. El semáforo por demanda es un ejemplo de un sistema de control de lazo abierto con sensores. • Sistemas de lazo cerrado Cuando las acciones de control se realizan en base a la información que se toma del propio sistema que se desea controlar: se trata de controles automáticos realimentados. El semáforo inteligente es un ejemplo de un sistema de control de lazo cerrado. Diferencias entre sistemas a lazo abierto y sistemas a lazo cerrado. Caso4: El riego automático a lazo abierto En el campo o en la ciudad, en grandes plantaciones o en pequeñas huertas o plazas públicas, se suelen utilizar sistemas de riego automáticos. Estos, por lo general, poseen algún tipo de dispositivo electrónico que almacena la información de la hora del día en que se debe abrir el paso del agua y, además, el tiempo durante el cual se debe mantener abierto. Esta información es programada previamente en base al conocimiento que se tiene sobre los cultivos, las características el suelo y las perspectivas del pronóstico meteorológico. Además, cuando se está planificando una producción de vegetales, el riego se decide de modo de lograr aumentar la productividad de las plantaciones, aumentando su rendimiento. El siguiente diagrama de bloques representa la estructura de un posible sistema automático de riego. Temporizador programable SueloElectroválvula
- 9. Educación Tecnológica pag. 9/9 La flecha punteada representa el flujo de información que permite abrir o cerrar el paso del agua; la flecha llena representa el flujo de agua que viene de algún tipo de depósito y pasa al suelo. El flujo de información que sale del controlador (el temporizador programable), controla el paso del flujo de materia hacia el sistema a controlar (la humedad del suelo, en este caso). La electroválvula, cuya función es actuar sobre el sistema a controlar, cumple una función conocida genéricamente por el nombre de actuador. ¿Qué ocurre con las plantaciones si las lluvias no coinciden con las programadas o la presión del agua que sale de las cañerías sufre modificaciones? En este caso, el sistema de control no es capaz de reaccionar a los cambios, la tierra a regar puede llegar a inundarse o secarse debido a que el controlador no puede “adaptarse”, modificando la duración del tiempo de riego en función de las mayores o menores necesidades de humedad por parte del suelo. La estructura de este sistema de control se caracteriza por poseer un flujo de información que circula en un único sentido (desde el controlador hacia el sistema a controlar). Se trata de una estructura de control a lazo abierto. Caso4: El riego automático a lazo cerrado ¿Cómo es posible lograr un sistema de riego que sea capaz de reaccionar a los cambios? El sistema deberá modificar de manera automática la duración del riego, en función de la humedad existente en el suelo. A tal fin, el controlador, deberá recibir la información de la variable a controlar (humedad del suelo) a través de un sensor: si la humedad resulta menor que la que se necesita, el controlador aumentará el tiempo de riego y, si es mayor, lo disminuirá. De este modo la duración del riego se ajusta de acuerdo con la humedad existente en el suelo. La estructura de un sistema de control de estas características posee un flujo de información que va del controlador al sistema a controlar y del sistema a controlar al controlador. Gracias a este flujo de información, el controlador puede decidir si realiza algún tipo de ajuste o corrección, comparando con cierta información (que tiene almacenada) sobre el resultado que se espera obtener en el sistema a controlar. Se trata de una estructura de control a lazo cerrado. Este sistema, que se denomina sistemas realimentado, puede representarse mediante el siguiente diagrama de bloques. controlador actuador planta o proceso sensor