El documento habla sobre los fundamentos y conceptos básicos de la robótica. Explica brevemente la historia de la robótica y define un robot como una máquina programable con sensores, inteligencia y movilidad. Luego describe diferentes tipos de robots como robots manipuladores, móviles, híbridos y humanoides. También explica conceptos clave como grados de libertad.





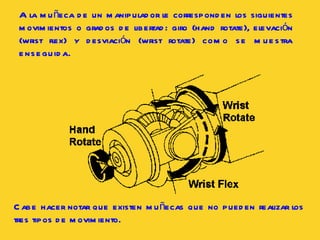
![Robots manipuladores [Brazos Robots]. CRS ROBOTICS MECATRÓNICA CRS ROBOTICS](https://image.slidesharecdn.com/1fundamentosyconceptosdelarobotica-111026170850-phpapp01/85/1-fundamentos-y-conceptos-de-la-robotica-8-320.jpg)
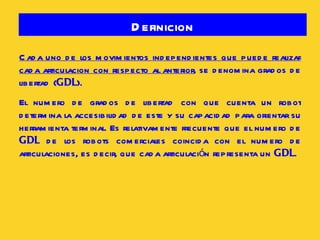
![Conceptos B ásicos Robots “híbridos” [Móviles con manipulación autónomos].](https://image.slidesharecdn.com/1fundamentosyconceptosdelarobotica-111026170850-phpapp01/85/1-fundamentos-y-conceptos-de-la-robotica-9-320.jpg)


![Un robot es ... “ manipulador programable y multifuncional diseñado para mover materiales, partes, herramientas o dispositivos específicos mediante movimientos programados para realizar diferentes tareas” [ Instituto de Robótica de América ]](https://image.slidesharecdn.com/1fundamentosyconceptosdelarobotica-111026170850-phpapp01/85/1-fundamentos-y-conceptos-de-la-robotica-14-320.jpg)
![“ agente activo artificial cuyo ambiente es el mundo físico” [ Russell y Norvig ] “ conexión inteligente de percepción a acción” [ Jones y Flynn ] “ una máquina programable capaz de percibir y actuar en el mundo con cierta autonomía” [ Sucar ] Un robot es ...](https://image.slidesharecdn.com/1fundamentosyconceptosdelarobotica-111026170850-phpapp01/85/1-fundamentos-y-conceptos-de-la-robotica-15-320.jpg)
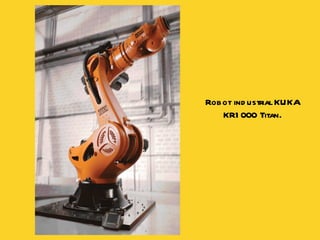
![Definición de Robot Industrial Manipulador multifuncional reprogramable con varios grados de libertad capaz de manipular materias, piezas, herramientas, o dispositivos especiales según trayectorias variables programadas para realizar tareas diversas. [ISO]](https://image.slidesharecdn.com/1fundamentosyconceptosdelarobotica-111026170850-phpapp01/85/1-fundamentos-y-conceptos-de-la-robotica-17-320.jpg)


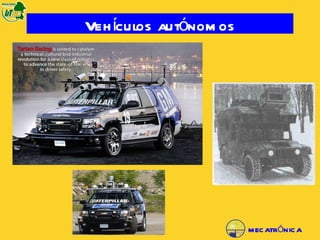
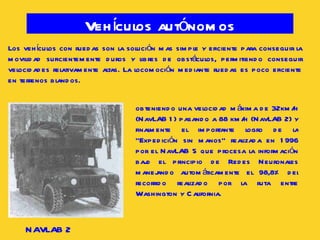
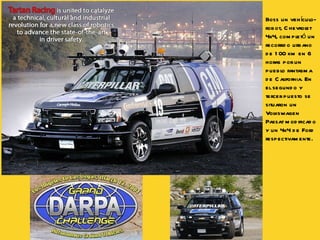
![Tipos de Robots Robots manipuladores [Brazos] Robots móviles Robots “híbridos” [Móviles con manipulación autónomos] Vehículos Robots caminantes 2 patas [ Humanoides ] 4/6 patas [ Insectos ]](https://image.slidesharecdn.com/1fundamentosyconceptosdelarobotica-111026170850-phpapp01/85/1-fundamentos-y-conceptos-de-la-robotica-21-320.jpg)
![Robots manipuladores [Brazo Robot] Los robots manipuladores son, esencialmente, brazos articulados. Un manipulador industrial convencional es una cadena cinemática abierta formada por un conjunto de eslabones interrelacionados mediante articulaciones. Las articulaciones permiten el movimiento relativo entre los sucesivos eslabones. Cadena cinemática abierta. C 0 C 1 C n](https://image.slidesharecdn.com/1fundamentosyconceptosdelarobotica-111026170850-phpapp01/85/1-fundamentos-y-conceptos-de-la-robotica-22-320.jpg)





![Robots caminantes 4/6 patas [Insectos] Permiten aislar el cuerpo del terreno empleando unicamente puntos de soporte para mantener la estabilidad y pasar sobre obstaculos. 2 patas [Humanoides] A dvanced S tep in I nnovative Mo bility http://www.honda.co.jp/ASIMO/technology/history/](https://image.slidesharecdn.com/1fundamentosyconceptosdelarobotica-111026170850-phpapp01/85/1-fundamentos-y-conceptos-de-la-robotica-33-320.jpg)