Descargado 1911 veces

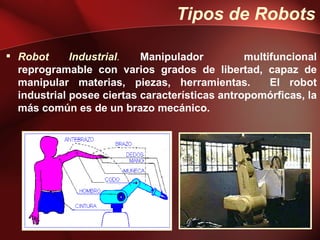
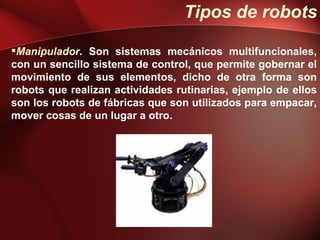
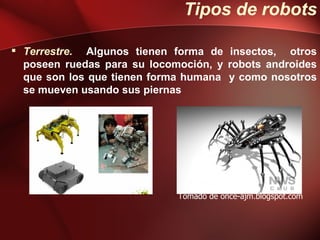
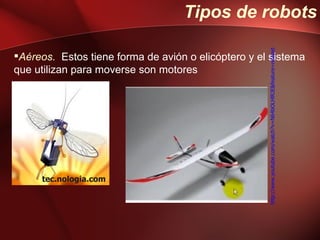
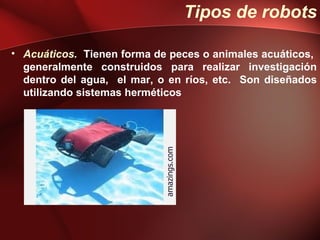
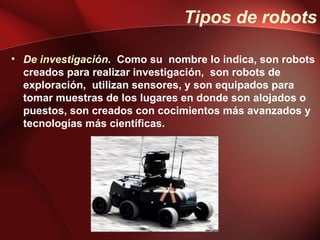


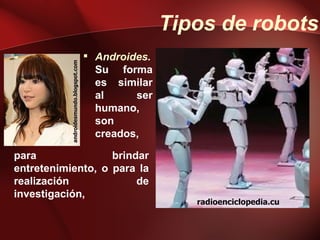




Este documento presenta una introducción a los conceptos básicos de la robótica, incluyendo las definiciones de robótica, robot y manipulador automático. También describe los diferentes tipos de robots como industriales, terrestres, aéreos, acuáticos, de investigación, didácticos y androides. Finalmente, presenta una breve reseña histórica de la robótica y algunas de sus aplicaciones actuales.