Este documento presenta una introducción al diseño de elementos de máquinas. Explica que el diseño de elementos de máquinas implica un conocimiento de geometría, ciencias básicas de ingeniería como física y mecánica, y habilidad para dibujar diagramas. Define el diseño como la transformación de ideas en maquinaria útil mediante la consideración de factores como carga, cinemática, selección de materiales, resistencia y costo. Describe que un elemento de máquina puede funcionar como transmisor de carga, movimiento o energía












![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES15
El esfuerzo de torsión para secciones circulares macizas está dado por,
3
16
d
T
π
τ =
donde:
T = momento torsor
d = diámetro
y, para secciones tubulares,
)(
16
44
dD
Td
−
=
π
τ
donde:
T = momento torsor
d = diámetro interior
D = diámetro exterior
Por lo general, necesita determinarse el momento de torsión T a partir de la potencia a transmitir y la velocidad del
eje rotatorio. Por conveniencia, a continuación se incluyen las fórmulas correspondientes a los dos sistemas de
unidades que se emplean en ingeniería.
Para el Sistema Internacional de unidades (SI): ωTP =
donde:
P = potencia [W]
T = momento de torsión [N-m]
ω = velocidad angular [rad/s]
Pero, puede darse el caso en que se tenga como dato el valor de la frecuencia de rotación f , entonces, la velocidad
angular puede ser calculada mediante la ecuación, fπω 2= .
Para el Sistema Inglés Gravitacional:
6300033000)12)(33000(
2 TnFVTn
P ===
π
donde:
P = potencia [HP]
T = momento de torsión [lb-in]
n = velocidad de rotación [rpm]
F = fuerza en la superficie exterior [lb]
V = velocidad periférica [ft/min]
2.12.4 TORSIÓN Y ESFUERZOS EN SECCIONES NO CIRCULARES
La determinación de las tensiones en una barra de sección no circular es de por sí un problema bastante complicado
que no se puede resolver por los métodos de la Resistencia de Materiales.
La causa radica en que, en el caso de una sección no circular, la hipótesis que en el caso de una sección circular
permitió simplificar el problema sobre la invariabilidad de las secciones transversales planas, ya no es válida.
Las secciones de la barra se alabean y, en consecuencia varía notablemente la distribución de las tensiones en la
sección. Así pues, al determinar los ángulos de distorsión, es necesario tener en consideración no solamente el ángulo
de giro mutuo de las secciones, sino también la distorsión local, relacionada con el alabeo de las secciones.
El problema se complica aún más por el hecho de que en el caso de una sección no circular, las tensiones dependen ya
no solamente de una variable )(ρ , sino también de las dos x( e )y .
Como ya se ha dicho, determinar los esfuerzos por torsión en elementos de sección no circular no es muy simple; por
lo general se aborda por métodos experimentales en los que se aprovecha una analogía con membranas o películas de
jabón. No obstante, Timoshenko y MacCullough dan la siguiente fórmula aproximada para el esfuerzo torsional
máximo en una barra de sección rectangular:
+=
a
e
ae
T
máx 8.132
τ](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-20-320.jpg)





![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES22
En lo que respecta al esfuerzo cortante, éste puede ser calculado mediante la expresión*:
bI
VQ
=τ
donde:
V : fuerza cortante ][N
AyQ = : momento estático de una sección ubicada sobre el eje neutro ][ 3
m
- A , área de dicha sección ][ 2
m
- y , distancia desde el centroide de A hasta el eje neutro ][m
b : ancho de la sección A ][m
I : momento de inercia de A con respecto a su centroide ][ 4
m
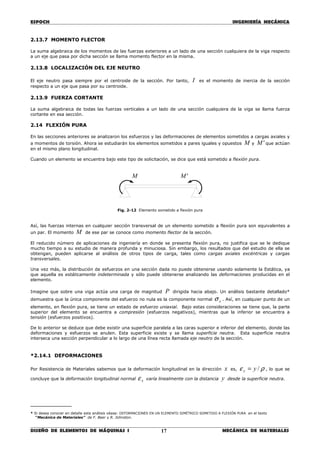
Para una viga de sección rectangular, la distribución del esfuerzo cortante es una función parabólica. Su valor es cero
a lo largo de las partes superior e inferior de la viga, mientras que alcanza su valor máximo en el eje neutro.
Fig. 2-20 Distribución de esfuerzos cortantes producidos por flexión en una viga de sección rectangular
Es necesario aclarar que, aunque Q es máximo para 0=y , no puede concluirse que τ será máximo a lo largo del
eje neutro ya que depende tanto del ancho b de la sección como de Q . Esto se nota, por ejemplo, en una viga de
sección trapezoidal. ¿Cómo varía el esfuerzo en este caso? Esto último queda a disposición del interesado.
2.16 ESFUERZOS BAJO CARGAS COMBINADAS
Hasta aquí se ha aprendido a calcular esfuerzos en elementos sometidos a carga axial céntrica, momentos torsores
(torques), momentos flectores y los debidos a carga transversal.
Ahora, y como se verá en los respectivos problemas, el conocimiento adquirido puede combinarse para determinar los
esfuerzos en elementos de máquinas en condiciones de solicitaciones bastante generales.
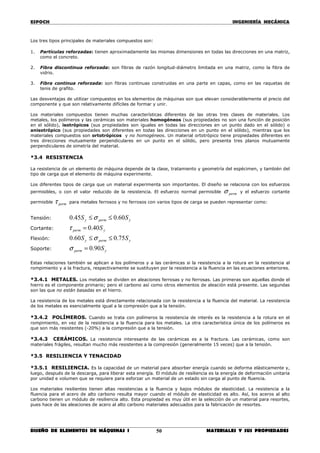
Considérese, por ejemplo, el elemento flexionado ABDE , de sección circular, sometido a varias.
Fig. 2-21 Elemento sujeto a la acción de cargas combinadas
__________
* Si desea conocer cómo se obtiene esta expresión véase: DISTRIBUCIÓN DEL ESFUERZO PROMEDIO en el texto “Mecánica de Materiales” de
A. Bedford y K. Liechti.
6F
A
B
D
E
K
1F
2F
3F
4F
5F
máxτNE.](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-27-320.jpg)










![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES33
DIAGRAMAS DE FUERZA CORTANTE Y DE MOMENTO FLECTOR
DESCRIPCIÓN DEL MÉTODO DE ÁREAS PARA OBTENER EL DIAGRAMA DE FUERZA CORTANTE
Los símbolos )(+↑ y )(−↓ que se muestran abajo, significan que los valores de las fuerzas cortantes en un punto
de la viga son positivos y deben ubicarse por encima de su eje o que, algunos valores de estas fuerzas son negativos y
deben ubicarse por debajo de su eje, respectivamente.
Las unidades de las fuerzas cortantes son las mismas que las cargas actuantes ][ Nlbkg −− .
De manera general, la ecuación a utilizarse es: AVV ±= 12
donde:
2V : es el valor de fuerza cortante en un punto posterior a otro elegido como origen de un tramo de la viga.
1V : es el valor de fuerza cortante en un punto elegido como origen de un tramo de la viga.
A : es el valor de área que representa el valor de una carga distribuida en forma de carga puntual.
- es (+) si la carga distribuida se encuentra dirigida hacia arriba.
- es (-) si la carga distribuida se encuentra dirigida hacia abajo.
- las áreas se obtienen del sistema original de cargas.
Es importante mencionar que:
♦ A pesar de que se encuentre ubicada por debajo de la viga, una carga distribuida (y por lo tanto su área), se
considera positiva, ya que ésta siempre se encuentra dirigida hacia arriba, y que
♦ A pesar de que se encuentre ubicada por encima de la viga, una carga distribuida (y por lo tanto su área), se
considera negativa, ya que ésta siempre se encuentra dirigida hacia abajo.
En lo que respecta a las cargas puntuales:
♦ A pesar de encontrarse ubicadas por debajo de la viga, se consideran positivas, ya que éstas siempre se
encuentran dirigidas hacia arriba, y que
♦ A pesar de encontrarse ubicadas por encima de la viga, se considera negativas, ya que éstas siempre se
encuentran dirigidas hacia abajo.
♦ Son las responsables de que en este diagrama se produzcan discontinuidades en los puntos donde éstas
actúan.
En el punto final de la viga, el valor de la fuerza cortante debe ser cero.
DESCRIPCIÓN DEL MÉTODO DE ÁREAS PARA OBTENER EL DIAGRAMA DE MOMENTO FLECTOR
Los símbolos )(+↑ y )(−↓ que se muestran abajo, significan que los valores de momentos flectores en un punto de
la viga son positivos y deben ubicarse por encima de su eje o que, algunos valores de estos momentos son negativos y
deben ubicarse por debajo de su eje, respectivamente.
Además, las unidades de los momentos flectores, en este caso, son todas en ].[ mkg .
De manera general, la ecuación a utilizarse es: AMM ±= 12
donde:
2M : es el valor de momento flector en un punto posterior a otro elegido como origen de un tramo de la viga.
1M : es el valor de momento flector en un punto elegido como origen de un tramo de la viga.
A : es el valor de área tomada del diagrama de fuerzas cortantes.
- es (+) si el área se encuentra por encima del eje de la viga.
- es (-) si el área se encuentra por debajo del eje de la viga.
Es importante mencionar que:
♦ Los momentos concentrados en (s.r) se consideran positivos y los en (s.c.r), negativos, y que además, éstos
son los responsables de que en este diagrama aparezcan discontinuidades en los puntos donde éstos actúan.](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-38-320.jpg)

![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES35
o PUNTO A :
Aquí solamente actúa el valor de la reacción producida por su correspondiente apoyo.
o PUNTO B :
Notemos que ahora debemos calcular dos valores de fuerza cortante* para este punto, 'BV y BV .
Esto debe ser así, ya que el primero de ellos, 'BV , toma en cuenta el valor de AV y de la carga distribuida (su área)
que llega hasta este punto, mientras que el segundo, BV , toma en consideración 'BV y la discontinuidad producida
por la carga puntual aplicada.
o PUNTO C :
Del mismo modo y por razones similares al punto anterior, aquí debemos calcular dos valores de fuerza cortante para
este punto, 'CV y CV .
o PUNTO D :
Finalmente, para determinar el valor de la fuerza cortante, se debe tomar en cuenta los valores de CV y del área de
la carga distribuida que llega hasta este punto.
Los valores de estas fuerzas cortantes, se muestran en la figura siguiente**.
DIAGRAMA DE FUERZA CORTANTE
Las unidades de las fuerzas cortantes, en este caso, son todas en ][kg .
____________________
* Puesto que estos son temas relacionados con Resistencia de Materiales, recomendamos revisar el texto: “Mecánica de Materiales” de los
autores F. Beer y R. Johnston.
** ¿Pueden aparecer líneas curvas en estos tipos de diagramas? La respuesta se encuentra en el Capítulo 2 de este texto.
0)5.1800(1200
:
)(120041502950
'
)(2950)1800(2150'
':
)(21501500650
'
)(650)3800(1750'
':
)(1750
:
=−=
−=
+↑=+−=
+=
−↓=−−=
−=
−↓=−−=
−=
−↓=−=
−=
+↑=
=
xV
AVVDEn
V
CyVV
xV
AVVCEn
V
PVV
xV
AVVBEn
V
AyVAEn
D
CD
C
CC
C
BC
B
BB
B
AB
A
A](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-40-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES36
DIAGRAMA DE MOMENTO FLECTOR
0)12005.15.0(900
:
)(900
)]21501()))21502950(1(5.0[(1650
:
)(1650
)6508125.05.0(0625.1914
:
)(0625.1914
)17501875.25.0(0
:
0:
1875.2
3
6501750
=+−=
+=
−↓=
+−−=
−=
+↑=
−=
−=
+↑=
+=
+=
=
=→
−
=
xxM
AMMDEn
M
xxxM
AMMCEn
M
xxM
AMMBEn
M
xxM
AMMEEn
MAEn
ma
aa
D
CD
C
C
BC
B
B
EB
E
E
AE
A
Las unidades de los momentos flectores, en este caso, son todas en ].[ mkg .
Por Resistencia de Materiales sabemos que, el momento flector máximo se produce cuando la fuerza cortante es cero.
El diagrama de fuerzas cortantes sugiere que el momento máximo se producirá en punto E (mostrado en el diagrama
de momentos flectores), ubicado a una distancia a del punto A .
Por Trigonometría (aplicando la función tangente en los triángulos rectángulos comprendidos en el tramo AB ), es
posible encontrar el valor de esta distancia.
El procedimiento para encontrar los momentos flectores en un determinado punto es muy similar al descrito para
fuerzas cortantes. Tómese muy en cuenta lo descrito anteriormente para el signo de las áreas.](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-41-320.jpg)

![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES38
En el problema anterior se hizo una descripción detallada de la manera como construir los diagramas de fuerzas
cortantes y de momentos flectores. En este problema, esto ya no se hará.
Algo muy importante que debe volver a mencionarse es que:
♦ Las discontinuidades en el diagrama de fuerzas cortantes las producen las cargas puntuales, mientras que las
discontinuidades en el diagrama de momentos flectores las ocasionan los momentos concentrados.
DIAGRAMA DE FUERZA CORTANTE
0083.157083.157
'
)(083.157':
)(083.15750083.107
'
)(083.107)210(083.87'
':
)(083.87:
)(083.87150917.62'
)(917.62':
)(917.62)3010(917.92
:
)(917.92:
)(917.92100917.192'
)(917.192':
)(917.192:
2
1
=+−=
+=
−↓==
−↓=−−=
−=
−↓=−−=
−=
−↓==
−↓=−=−=
+↑==
+↑=−=
−=
+↑==
+↑=−=−=
+↑==
+↑==
H
HH
GH
G
GG
G
FG
EF
EE
DE
D
CD
BC
BB
AB
A
V
HyVV
VVHEn
V
PVV
xV
AVVGEn
VVFEn
PVV
VVEEn
xV
AVVDEn
VVCEn
PVV
VVBEn
AyVAEn
Las unidades de las fuerzas cortantes, en este caso, son todas en ][N .](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-43-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES39
DIAGRAMA DE MOMENTO FLECTOR
08080
'
)(80)2083.157(17.394'
':
)(17.394)]2083.87()2)083.87083.107(5.0[336.588
:
)(336.588100336.488
'
)(336.488)1083.87(419.575'
':
)(419.575)1917.62(502.512
:
)(502.512)]3917.62()3)917.62917.92(5.0[(751.278
:
)(751.278)1917.92(834.185
:
)(834.185)2917.192(200
:
)(200:
2
1
=−=
−=
+↑=−=
−=
+↑=+−−=
−=
+↑=+=
+=
+↑=−=
−=
+↑=+=
+=
+↑=+−+=
+=
+↑=+=
+=
+↑=+−=
+=
−↓==
H
HH
H
GH
G
FG
F
FF
F
EF
E
DE
D
CD
C
BC
B
AB
A
M
MMM
xM
AMMHEn
xxM
AMMGEn
M
MMM
xM
AMMFEn
xM
AMMEEn
xxM
AMMDEn
xM
AMMCEn
xM
AMMBEn
MMAEn
Las unidades de los momentos flectores, en este caso, son todas en ].[ mN .](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-44-320.jpg)

![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES41
DIAGRAMA DE FUERZA CORTANTE
Las unidades de las fuerzas cortantes, en este caso, son todas en ][kips .
DIAGRAMA DE MOMENTO FLECTOR
Las unidades de los momentos flectores, en este caso, son todas en ][ piekips − .
PROBLEMA 8
Se aplican dos fuerzas verticales a la viga de sección mostrada. Halle los máximos esfuerzos de tensión y compresión
en la parte BC de la viga.
SOLUCIÓN:
El estudiante debe ya haberse fijado que se trata de un problema relacionado con flexión pura (pueda que sea
conveniente revisar la sección 2.14 para recordar el tema).
También, adviértase que el valor máximo de dicha flexión se encuentra en el tramo BC de la viga. Esto último se
comprobará del diagrama de momento flector.
03434'
)(34':
)(34102410'
)(24':
)(24)83(:
0:
=+−=+=
−↓==
−↓=−−=−=
−↓==
−↓=−=−=
=
yEE
CE
CC
BC
AB
A
EVV
VVEEn
VV
VVCEn
xAVVBEn
VAEn
0318318
'
)(318)534(148'
':
)(14820168
'
)(168)324(96'
':
)(96)8245.0(
:
0:
=+−=
+=
−↓=−−=
−=
−↓=+−=
+=
−↓=−−=
−=
−↓=−=
−=
=
E
EEE
E
CE
C
CC
C
BC
B
AB
A
M
MMM
xM
AMMEEn
M
MMM
xM
AMMCEn
xxM
AMMBEn
MAEn
in4
in5.0
in3in5.0
lb3000
in15 in10
D
C
A
B
in10
lb3000](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-46-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES42
CÁLCULO DE LAS REACCIONES
Tomando momentos con respecto al punto A :
∑ = :0AM 0)35()253000()103000( =+−− Dyxx ⇒ ↑= lbDy 3000
Realizando sumatoria de fuerzas en la vertical:
∑ = :0yF 030003000 =+−− DyAy ⇒ ↑= lbAy 3000
DIAGRAMA DE FUERZA CORTANTE
DIAGRAMA DE MOMENTO FLECTOR
PROPIEDADES GEOMÉTRICAS DE LA SECCIÓN
Área y centroide de la sección
in15in10
lb3000
DyAy
lb3000
in10
0'
)(3000':
)(30003000'
0':
03000'
)(3000':
)(3000:
=+=
−↓==
−↓=−=
==
=−=
+↑==
+↑==
DyVV
VVDEn
VV
VVCEn
VV
VVBEn
AyVAEn
DD
CD
CC
BC
BB
AB
A
][: lbUnidades
0)103000(30000
:
)(30000:
)(30000)103000(
:
0:
=−=
−=
+↑==
+↑==
+=
=
xM
AMMDEn
MMCEn
xM
AMMBEn
MAEn
B
CD
BC
B
AB
A
][: inlbUnidades −
NE.
2yy
x
5.0
75.1
5.0
3
75.1
1y
iny
in
inxx
A
yA
y
inA
inxxAAA
5.2
5.3
)]75.1)(5.35.0()25.3)(5.075.1(2[).(
5.3
)]5.35.0()5.075.1(2[2
2
3
2
2
21
=
+
==
=
+=+=
∑](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-47-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MECÁNICA DE MATERIALES43
Momento de Inercia con respecto al eje x*
44
3
2
3
3
2
3
21
67.25
3
5.35.0
)25.35.075.1(
12
5.075.1
2
3
.
)..(
12
.
2)()2(
inin
x
xx
x
I
hb
yhb
hb
III
x
xxx
=
+
+=
+
+=+=
Momento de Inercia con respecto al eje neutro
[ ] 4
.
422
. 79.3)5.25.3(67.25)( inIinxyAII NExNE =⇒−=−=
ESFUERZO MÁXIMO DE TENSIÓN
Analizando la figura del enunciado del problema, notamos que la flexión producirá esfuerzos de tensión en aquellas
fibras que se encuentren ubicadas por debajo del eje neutro. Esto último se debe a que la viga flexiona “hacia abajo”º.
Luego, este esfuerzo está dado por:
NE
máx
x
I
yM
.
2.
=σ
Aquí, máxM es el “mayor” valor de momento que se obtiene del diagrama de momento flector, mientras que, 2y es
la distancia máxima medida desde el eje neutro a una de las fibras que se encuentran bajo tensión.
Finalmente, kpsi
in
ininlb
I
yM
I
yM
x
NE
máx
NE
máx
x 78.19
79.3
)5.2(.30000..
4
..
2
==→== σσ
ESFUERZO MÁXIMO DE COMPRESIÓN
De manera similar, analizando la figura del enunciado del problema, notamos que la flexión producirá esfuerzos de
compresión en aquellas fibras que se encuentren ubicadas por encima del eje neutro. Esto último se debe a que la viga
flexiona “hacia abajo”.
Luego, este esfuerzo está dado por:
NE
máx
x
I
yM
.
1.
−=σ
Aquí, máxM es el “mayor” valor de momento que se obtiene del diagrama de momento flector, mientras que, 1y es
la distancia máxima medida desde el eje neutro a una de las fibras que se encuentran bajo compresión.
Finalmente, kpsi
in
ininlb
I
yM
x
NE
máx
x 91.7
79.3
)5.25.3(.30000.
4
.
1
−=
−
−=→−= σσ
__________
* En la ecuación que sigue, y es la distancia desde el centroide de la sección 1 hasta el eje x.
º Significa que la deflexión (flecha o deformación lineal) es originada hacia abajo.](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-48-320.jpg)




![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I MATERIALES Y SUS PROPIEDADES48
CAPÍTULO 3
MATERIALES Y SUS PROPIEDADES
*3.1 INTRODUCCIÓN
Un paso importante en el Diseño lo constituye la elección del material sólido. La capacidad de explotar el potencial y
las características de un material es esencial para asegurar que se utilice el mejor material para un elemento de
máquina particular. Por lo tanto, conocer las propiedades de los materiales resulta de suma importancia.
*3.2 MATERIALES DÚCTILES Y FRÁGILES
*3.2.1 MATERIALES DÚCTILES
La ductilidad es la medida del grado de la deformación plástica sostenida al momento de la fractura.
Un material dúctil puede sufrir grandes deformaciones unitarias antes de su ruptura. Con frecuencia los diseñadores
emplean materiales dúctiles porque éstos absorben choques (o energía) y, si se sobrecargan, presentarán grandes
antes de su falla. Asimismo, la concentración de esfuerzos se disipa parcialmente con las deformaciones que se logran
mediante el empleo de materiales dúctiles.
Una forma de especificar si un material es dúctil es de acuerdo con su porcentaje de alargamiento ( Al% )
%100% x
l
ll
AL
o
ofr
−
=
donde:
frl = longitud el espécimen al momento de la fractura [m]
ol = longitud del espécimen sin carga [m]
Un material dúctil presenta un Al% alto antes de la falla. Considere también que en la ecuación anterior, la
longitud original del espécimen ol es un valor importante, porque una porción significativamente de la deformación
plástica al momento de la fractura está confinada a la región estrecha. Así, la magnitud del Al% dependerá de la
longitud del espécimen. Cuanto menor sea ol , mayor será la fracción del alargamiento total a partir de la parte más
estrecha y, por consecuencia, mayor el valor del Al% .
*3.2.2.MATERIALES FRÁGILES
Un material frágil presenta poca ( %5% <Al ) o ninguna fluencia antes de la falla. El hierro fundido gris es un
ejemplo de un material frágil cuyo Al% es muy pequeño.
*3.3 CLASIFICACIÓN DE LOS MATERIALES
Los materiales de ingeniería se pueden clasificar en cuatro categorías: metales, cerámicas y vidrios, polímeros y
elastómeros, y compuestos.
Generalmente los miembros de cada clase tienen las características comunes siguientes:
1. Propiedades similares, como composición química y estructura atómica.
2. Rutas de procesos similares.
3. Aplicaciones similares.
*3.3.1 METALES
Los metales constituyen combinaciones de elementos metálicos, con grandes cantidades de electrones no localizados
(es decir, electrones no ligados a átomos particulares). Los metales extremadamente buenos conductores de la
electricidad y del calor, y no son transparentes a la luz visible; una superficie metálica pulida tiene una apariencia
lustrosa. Además, los metales son resistentes y usualmente deformables, lo cual los vuelve materiales de suma
importancia en el diseño de máquinas.](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-53-320.jpg)









![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I ANÁLISIS DEL ESFUERZO59
Se debe tomar nota de las características siguientes de los esfuerzos en un plano octaédrico:
1. Los esfuerzos normales idénticos actúan sobre los ocho planos. De esta forma, los esfuerzos normales tienden a
comprimir o largar al octaedro pero no lo distorsionan.
2. Los esfuerzos cortantes idénticos actúan sobre los ocho planos. De esta forma, los esfuerzos cortantes tienden a
distorsionar al octaedro sin cambiar su volumen.
El hecho de que los esfuerzos normales y cortantes sean iguales para los ocho planos constituye una herramienta
poderosa en el análisis de fallas.
El esfuerzo octaédrico normal se expresa en términos de los esfuerzos normales principales o de los esfuerzos en las
coordenadas x , y , z , como:
33
321 zyx
oct
σσσσσσ
σ
++
=
++
=
2/12
3/1
2
3/2
2
2/1
2/12
13
2
32
2
21 ][
3
2
])()()[(
3
1
τττσσσσσστ +++−+−+−=oct
2/1222222
)](6)()()[(
3
1
xzyzxyxzzyyxoct τττσσσσσστ +++−+−+−=
Note que el esfuerzo cortante octaédrico se puede expresar en términos del esfuerzo de Von Misses como:
eoct στ
3
2
=
donde:
eσ = esfuerzo de Von Misses
Para un estado de esfuerzo uniaxial ( 032 == σσ ) y entonces: 1σσ =e
Para un estado de esfuerzo biaxial ( 03 =σ ) y entonces:
2/1
21
2
2
2
1 )( σσσσσ ++=e
Para un estado de esfuerzo triaxial:
2/12
32
2
31
2
21
2
)()()(
−+−+−
=
σσσσσσ
σe](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-64-320.jpg)











![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I ANÁLISIS DEL ESFUERZO71
Luego, el elemento que representa el estado definitivo de esfuerzos según el sistema coordenado xy es:
Las coordenadas de los puntos TX y TY son, respectivamente, [ ]TxyTx )(,)( τσ − y [ ]TxyTy )(,)( τσ
Representando este estado de tensiones en un círculo de Mohr, se tiene:
Los esfuerzos normales máximo y mínimo son, respectivamente:
422.6
578.168
=→−=−==
=→+=+==
mínmín
máxmáx
RCACOCOA
RCCEOCOE
σσ
σσ
El esfuerzo cortante máximo es:
078.81=→= máxmáx R ττ
El ángulo al que se produce el esfuerzo normal máximo es: º837.33=pθ en (s.c.r).
El ángulo al que se produce el esfuerzo cortante máximo es: º163.56=cθ en (s.r).
El esfuerzo normal, cuando se alcanza el esfuerzo cortante máximo es: 5.87' == Cnσ a tensión.
Tx )(σ
Ty )(σ
Txy )(τ
σ
τ
pθ2
TY
TX
E
B CO A
D
R
[ ]
[ ]
º163.56º9022
º837.33
)(
2
078.8175
2
699.56301.118
)(
2
)()(
5.87
2
699.56301.118
2
)()(
2
2
2
2
=→=+
=→==
=+
−
=
+
−
=
=
+
=→
+
=
cpc
p
TxyT
p
Txy
TyTx
TyTx
RR
DX
sen
R
R
CC
θθθ
θ
τ
θ
τ
σσ
σσ
máxτ](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-76-320.jpg)









![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I ANÁLISIS DEL ESFUERZO81
Algo importante que debe mencionarse con respecto a la parte )a es lo siguiente:
- El ángulo pθ encontrado se mide en (s.r, ángulo negativo) desde Y hasta A . Alternativamente, en la figura se
observa que el ángulo que lleva X a A en (s.c.r) es, º62.112)2º180( =− pθ , o sea que también,
º31.56=pθ .
Comprobación:
4.2)º31.562tan(4.2)]º69.33(2tan[ −=−=− xyx
- El ángulo cθ que lleva Y a máxτ es, º62.22)2º90( =− cθ , es decir, º31.11=cθ en (s.c.r).
Pero también, el ángulo cθ que lleva Y a máxτ es, º38.157)2º90( =+ pθ , es decir, º69.78=cθ en (s.r).
Comprobación:
417.0)]º69.78(2tan[417.0)]º31.11(2tan[ =−= xyx
Considerando estas últimas observaciones, los elementos que muestran los esfuerzos normales máximo y mínimo, así
como el esfuerzo cortante máximo, son, respectivamente:
PROBLEMA 11
Se sabe que para cada una de las dos orientaciones dadas de los ejes, para un estado de esfuerzo plano, los esfuerzos
normal y cortante están dirigidos como se muestra y las magnitudes de los esfuerzos normales xσ , yσ y 'xσ son
respectivamente, 10 kpsi, 2 kpsi y 12 kpsi. Halle: a) los planos y esfuerzos principales, y b) el máximo esfuerzo
cortante en el plano.
SOLUCIÓN:
Coordenadas del primer estado de esfuerzo
Las coordenadas de los puntos X y Y son, respectivamente, ),10( xyτ− y ),2( xyτ .
Coordenadas del segundo estado de esfuerzo
Cuando el elemento ha girado el ángulo indicado en (s.c.r), las coordenadas de los puntos 'X y 'Y deberán ser,
respectivamente, ),12(),( ''''' yxyxx ττσ = y ),( ''' yxy τσ .
xσ
yσ
xyτ
=
º30
'xσ
'yσ
''yxτ
máxσ
pθ
x
y
mínσ
'nσ
cθ
y
x
'nσ
máxτ](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-86-320.jpg)












![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA94
PROBLEMAS RESUELTOS
TEORÍAS DE FALLA EN MATERIALES DÚCTILES
PROBLEMA 1
Un acero dúctil tiene una resistencia de fluencia de 40 kpsi. Determínese los factores de seguridad correspondientes a
la falla mediante las teorías del esfuerzo normal máximo, del esfuerzo cortante máximo y de la energía de distorsión,
respectivamente, para cada uno de los siguientes estados de esfuerzo (valores en kpsi):
a) 10=xσ , 4−=yσ y 0=xyτ
b) 10=xσ , 0=yσ y 4=xyτ (s.r)
c) 2−=xσ , 8−=yσ y 4=xyτ (s.c.r)
d) 10=xσ , 5=yσ y 1=xyτ (s.r)
DATO: kpsiSy 40=
SOLUCIÓN:
a) Hallemos primero los esfuerzos normales máximo y mínimo, así como del esfuerzo cortante máximo.
Recordando las ecuaciones que definen el centro y radio de un círculo de Mohr dadas en el capítulo 4, obtenemos:
3=C , 7=R , luego, 10=máxσ y 4−=mínσ
T.E.N.M: 4
10
40
=⇒=→= nn
S
n
máx
y
σ
Sabemos que para la teoría del esfuerzo cortante, Rmáx =τ , luego,
T.E.C.M: 857.2
7
405.05.0
=⇒=→= n
x
n
S
n
máx
y
τ
Haciendo, Amáx σσ = y Bmín σσ = , tenemos que el esfuerzo de Von Misses* es:
49.12')4()]4(10[)10(' 2222
=→−+−−=+−= σσσσσσ xBBAA
T.E.D: 203.3
49.12
40
'
=⇒=→= nn
S
n
y
σ
b) De manera similar al literal anterior:
5=C , 403.6=R , luego, 403.11=máxσ y 403.1−=mínσ
T.E.N.M: 508.3
403.11
40
=⇒=→= nn
S
n
máx
y
σ
__________
* No confundir este esfuerzo con el equivalente de Von Misses, ya que este último toma en cuenta la acción de esfuerzos combinados (normales y
cortantes), mientras que el primero, como tal vez ya lo ha notado, sólo toma en cuenta esfuerzos normales máximos (principales).](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-99-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA95
T.E.C.M: 124.3
403.6
405.05.0
=⇒=→= n
x
n
S
n
máx
y
τ
Haciendo, Amáx σσ = y Bmín σσ = , tenemos que el esfuerzo de Von Misses es:
165.12')403.1()]403.1(403.11[)403.11(' 2222
=→−+−−=+−= σσσσσσ xBBAA
T.E.D: 288.3
165.12
40
'
=⇒=→= nn
S
n
y
σ
c) 5−=C , 5=R , luego, 0=máxσ y 10−=mínσ
Evidentemente el esfuerzo normal máximo no puede ser cero, puesto que al sustituir este valor en la ecuación para el
coeficiente de seguridad obtenemos un valor para éste último de infinito, lo que naturalmente es un absurdo.
En este caso particular se hace, mínmáx σσ = , luego tenemos,
T.E.N.M: 4
10
40
=⇒=→= nn
S
n
mín
y
σ
T.E.C.M: 4
5
405.05.0
=⇒=→= n
x
n
S
n
máx
y
τ
Haciendo, Amáx σσ = y Bmín σσ = , tenemos que el esfuerzo de Von Misses es:
10')10()]100(0[)0(' 2222
=→−+−−=+−= σσσσσσ xBBAA
T.E.D: 4
10
40
'
=⇒=→= nn
S
n
y
σ
d) 5.7=C , 693.2=R , luego, 193.10=máxσ y 807.4=mínσ
T.E.N.M: 924.3
193.10
40
=⇒=→= nn
S
n
máx
y
σ
T.E.C.M: 428.7
693.2
405.05.0
=⇒=→= n
x
n
S
n
máx
y
τ
Haciendo, Amáx σσ = y Bmín σσ = , tenemos que el esfuerzo de Von Misses es:
832.8')807.4()]807.4(193.10[)193.10(' 2222
=→+−=+−= σσσσσσ xBBAA
T.E.D: 529.4
832.8
40
'
=⇒=→= nn
S
n
y
σ
Importante es mencionar que los esfuerzos normales máximo y mínimo no necesariamente tienen que ser positivo y
negativo o viceversa, respectivamente. Adviértase que en la T.E.N.M, lo que se toma en cuenta es el valor del
“mayor” esfuerzo normal principal.](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-100-320.jpg)

![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA97
Punto O :
Trasladando la carga F a este punto tenemos:
FMLFMM
FTLFTM
xy
xz
16)2(
15.
2
1
=→+==
=→==
El esfuerzo normal por flexión es: F
F
d
M
x
O
x 289.48
)5.1(
)16(3232
33
==→=
π
σ
π
σ
El esfuerzo cortante por torsión es: F
F
d
T
xz
O
xz 635.22
)5.1(
)15(1616
33
==→=
π
τ
π
τ
El esfuerzo equivalente de Von Misses es:
FFFeq
xzxeq
201.62)635.22(3)289.48(
)(3)(
22
22
=+=
+=
σ
τσσ
La carga F que produce fluencia en la barra es:
lbF
F
n
Sy
eq
239.1302
81000201.62
=⇒
=→=σ
De los resultados anteriores se concluye que el punto más crítico es el punto A .
Esto era de esperarse ya que, por definición de esfuerzo, AP /=σ , vemos que el esfuerzo aumentará cuando el
área disminuya (punto A ) y, decrecerá cuando el área aumente (punto O ). Según esto último, la carga más segura
que puede soportar la barra es lb377.416 . Esto debe ser así ya que, si la sección de diámetro de in1 puede
soportarla, con mucha más razón lo hará la de in5.1 .
PROBLEMA 3
La figura muestra una barra redonda, sometida a la acción de un vector momento M = 1.75i + 1.10k, en kN-m.
El material es una aleación de aluminio UNS A95056-H38. Un elemento de esfuerzo A , se encuentra localizado en la
parte superior de la barra. A partir de los esfuerzos producidos en este elemento, determínese el factor de seguridad
contra falla estática utilizando la teoría del esfuerzo cortante máximo y la de la energía de distorsión.
SOLUCIÓN:
Puesto que este vector momento resulta que también es un vector libre, sus componentes nos muestran que en el
punto en cuestión se tiene:
10.175.1 ====== MMMyTMM xyzyzx
Unidades: ][ mkN −
xM
y
z
A
x
zM
kpsiS
mkNM
mkNM
inmd
Datos
y
z
x
50
10.1
75.1
575.1040.0
:
=
−=
−=
==](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-102-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA98
Como yS se encuentra dado en unidades del sistema inglés, transformando el torque y el momento a estas unidades
tenemos:
inlbmkNMyinlbmkNT .9732.10.1.615.15482.75.1 ====
El esfuerzo normal por flexión es: 856.25381
)575.1(
)9732(3232
33
−=−=→−=
π
σ
π
σ xx
d
M
El esfuerzo cortante por torsión es: 397.20182
)575.1(
)615.15482(1616
33
==→=
π
τ
π
τ xzxz
d
T
Unidades: ][ psi
Teniendo en cuenta que 0=yσ , obtenemos: 686.12−=C , 838.23=R , 152.11=máxσ y 524.36−=mínσ
Unidades: ][kpsi
T.E.C.M: 049.1
838.23
505.05.0
=⇒=→= n
x
n
S
n
máx
y
τ
Haciendo, Amáx σσ = y Bmín σσ = , tenemos que el esfuerzo de Von Misses es:
194.43')524.36()]524.36(152.11[)152.11(' 2222
=→−+−−=+−= σσσσσσ xBBAA
T.E.D: 158.1
194.43
50
'
=⇒=→= nn
S
n
y
σ
PROBLEMA 4
Una palanca, sometida a una fuerza estática vertical hacia debajo de 400 lb, está montada en una barra de 1 pulg. de
diámetro, como se indica.
a) Hállense los esfuerzos críticos en la barra circular.
b) Calcúlese ele factor de seguridad empleando la teoría del esferazo cortante máximo.
c) Esta barra es de acero UNS G46200, tratado térmicamente y estirado a 800ºF. Con base en la carga estática,
encuéntrese el factor de seguridad por medio de la teoría de la energía de distorsión.
kpsiS
lbF
ind
inL
inL
Datos
y 94
400
1
7
9
:
2
1
=
=
=
=
=](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-103-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA99
SOLUCIÓN:
a)
Trasladando la carga F al empotramiento tenemos:
28007400.
36009400.
2
1
==→==
==→==
xMLFMM
xTLFTM
yz
xy
El esfuerzo normal por flexión es: 566.28520
)1(
)2800(3232
33
==→=
π
σ
π
σ xx
d
M
El esfuerzo cortante por torsión es: 649.18334
)1(
)3600(1616
33
==→=
π
τ
π
τ xzxy
d
T
Unidades: ][ psi
b) Teniendo en cuenta que 0=yσ , obtenemos:
261.14=C , 228.23=R , 489.37=máxσ y 967.8−=mínσ
Unidades: ][kpsi
T.E.C.M: 023.2
228.23
945.05.0
=⇒=→= n
x
n
S
n
máx
y
τ
c) Haciendo, Amáx σσ = y Bmín σσ = , tenemos que el esfuerzo de Von Misses es:
685.42')967.8()]967.8(489.37[)489.37(' 2222
=→−+−−=+−= σσσσσσ xBBAA
T.E.D: 202.2
685.42
94
'
=⇒=→= nn
S
n
y
σ
PROBLEMA 5
La figura presenta un elemento de tubo en voladizo construido con una aleación de aluminio UNS A92014-T4. Se
desea obtener un conjunto de dimensiones de sección transversal para el tubo con base a una carga de flexión
kNF 80.0= , una tensión axial kNP 20.7= y una carga de torsión mNT .38= . Los factores de seguridad por
carga serán 20.2=Fn , 30.1=Pn y 90.1=Tn . Utilícese un factor de seguridad por resistencia 50.1=Rn .
z
y
x
m12.0
F
P
T
30.3.
.38
7200
800
/7.27579029140
:
2
==
=
=
=
==
RF
y
nnn
mNT
NP
NF
mNkpsiS
Datos](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-104-320.jpg)







![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA107
PLANO xy
Transformando la carga distribuida w en carga puntual:
↑=⇒=→= lbWlbxWlwW 160)820(.
CÁLCULO DE LAS REACCIONES:
↓=⇒=−++−=
↑=⇒=−+=
∑
∑
lbOyFyCyWOyF
lbCyFyCyWM
y
O
3571.960:0
761.40)25.14()5.11()75.5(:0
DIAGRAMAS DE FUERZA CORTANTE Y MOMENTO FLECTOR
En el diagrama de fuerza cortante se tiene un punto de intersección I , en el cual se producirá el máximo valor de
momento flector. Llamando x la distancia que existe entre los puntos A e I , y l a la distancia correspondiente
entre I y B , tenemos:
Por Trigonometría Elemental: inx
xx
818.4
8
643.63357.96
tan =⇒
−
==θ
Por lo tanto: inl 182.3=⇒
Por supuesto, tanto x como l son necesarios para la construcción del diagrama de momento flector.
El valor máximo de momento flector es: inlbM I .749.400=
PLANO xz
Ahora bien, según la figura del problema el sistema coordenado tiene la orientación siguiente:
75.275.18
Fy
w
Cy
Oy
75.1
≅
75.275.14
Cy
FyOy
W
75.1 4
][: lbUnidades
].[: inlbUnidades
75.25.11
Az
FzOz
x
z
⇒](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-112-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA108
CÁLCULO DE LAS REACCIONES:
↓=⇒=+−=
↑=⇒=−=
∑
∑
lbOzFzAzOzF
lbAzFzAzM
z
O
942.440:0
88.2320)25.14()5.11(:0
Adviértase que en Az , la dirección (mostrada por la flecha) es negativa según el sistema coordenado adjunto.
Algo similar sucede con Oz ; su dirección es positiva.
Esto último debe tenerse muy en cuenta para la construcción de los diagramas de fuerza cortante y momento flector.
DIAGRAMAS DE FUERZA CORTANTE Y MOMENTO FLECTOR
El valor máximo de momento flector es: inlbMC .833.516=
VALORES RESULTANTES DE MOMENTOS FLECTORES
El estudiante habrá notado que los máximos momentos flectores ocurren en puntos distintos del eje, a saber, en el
plano xy el valor máximo se encuentra en el punto I , mientras que en el plano xz éste está en el punto C .
Ahora bien, sabemos que el diseño debe realizarse en un punto específico (punto crítico) para lo cual debemos tener
los valores del momento flector de este punto en los dos planos antes considerados.
Es evidente que, como en el plano xy el valor máximo de momento flector se encuentra en el punto I , y que en el
plano xz el momento flector máximo está en el punto C , uno de ellos será más crítico que el otro.
Punto I Punto C
inlbMxzPlano
inlbMxyPlano
I
I
.179.295:)(
.749.400:)(
=
=
inlbMxzPlano
inlbMxyPlano
C
C
.833.516:)(
.118.188:)(
=
=
Importante es mencionar que el valor de IM con respecto al plano xz fue obtenido por Geometría Elemental
(semejanza de triángulos).
Ahora que ya tenemos los valores de los puntos I y C en los planos xy y xz , debemos calcular el valor del
momento flector resultante en cada uno de esos puntos, así:
Momento resultante en el punto I :
inlbMMMMM IIxzIxyII .498179.295749.400)()( 2222
=⇒+=→+=
Momento resultante en el punto C :
inlbMMMMM CCxzCxyCC .550833.516118.188)()( 2222
=⇒+=→+=
][: lbUnidades
].[: inlbUnidades](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-113-320.jpg)

![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA110
Como este problema ha sido resuelto de una manera muy detallada, en los problemas que vienen a continuación (y
que son bastante similares a éste), sólo se describirán algunos conceptos adicionales, si así lo amerita el problema.
Las soluciones a ellos se harán de una manera directa y ya no de la forma que se hizo aquí.
PROBLEMA 10
La figura ilustra un eje de transmisión con cojinetes en A y D , una polea en B y otra en C . Las fuerzas indicadas
en la superficie de las poleas representan las tensiones de las bandas en los lados tirante y flojo de las mismas.
Calcúlese el momento torsionante aplicado al eje por la polea que está en C y la polea que está en B . Determínese
un diámetro apropiado del árbol, tomando como base un esfuerzo normal de 16 kpsi y/o un esfuerzo cortante
admisible de 12 kpsi. (Dimensiones en pulgadas).
SOLUCIÓN:
Es evidente que las fuerzas actuantes (tensiones de las bandas) se encuentran ubicadas en planos distintos, a saber,
en el plano xy actúa una tensión resultante de lblb 350)50300( =+ , mientras que en el plano xz actúa una
tensión resultante de lblb 387)27360( =+ . Estas tensiones resultantes son el resultado (cabe la redundancia) de
trasladar las tensiones de las bandas al centro del eje de transmisión.
Según lo anterior, obtenemos:
PLANO xy
De aquí en adelante, en todos los problemas que se requieran diagramas de momentos flectores para su solución,
únicamente se presentará éste y ya no la forma como se obtuvo, pues pensamos, que en este punto, el estudiante ya
domina la construcción de estos diagramas.
DIAGRAMA DE MOMENTOS FLECTORES
kpsi
kpsi
ind
ind
Datos
adm
adm
D
B
12
16
6
8
:
=
=
=
=
τ
σ
6
8
8
z
Dd
Bd
lb27
lb50
lb300
D
C
A
B
lb360
x
y
6
350
DyAy
88
↓=
=−+−=
↓=
=−=
∑
∑
lbAy
DyAyF
lbDy
DyxM
y
A
727.222
0350:0
273.127
022)8350(:0
A
B C
D
CB
][635.763)(
][816.1781)(
inlbM
inlbM
xyC
xyB
−=
−=
A
D](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-115-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA111
PLANO xz
DIAGRAMA DE MOMENTOS FLECTORES
MOMENTOS RESULTANTES
Punto B : ][754.1971])[(])[( 22
inlbMMMM BzxBxyBB −=⇒+=
Punto C : ][241.1853])[(])[( 22
inlbMMMM CzxCxyCC −=⇒+=
Cálculo del diámetro
Por flexión:
Punto B : ][079.1
32
3
ind
d
M B
admx =⇒==
π
σσ
Punto C : ][057.1
32
3
ind
d
MC
admx =⇒==
π
σσ
Por torsión:
Puesto que, CB PP = * → CCBB TT ωω = ; pero como el eje gira a la misma velocidad angular, CB ωω = .
Por lo tanto se tiene que: TTT CB == ; además, poleaflojoladotensolado rFFT ).( −− −=
Finalmente, el torque es:
][10003)27360(4)50300().( inlbTxxrFFT poleaflojoladotensolado −=⇒−=−=−= −−
Puntos B y C : ][752.0
16
3
ind
d
T
admx =⇒==
π
ττ
________
* Claro, esto es así ya que no se consideran pérdidas de potencia debido a la fricción entre bandas y poleas. Ciertamente, esto no ocurre en los
sistemas mecánicos reales en los cuales, efectivamente, se produce una pérdida de potencia, la misma que se manifiesta en forma de calor.
Recuerde que, la energía no se crea ni se destruye, únicamente se trasforma.
D
CB
68
387
DzAz
8
↓=
=+−=
↓=
=−=
∑
∑
lbAz
DzAzF
lbDz
DzxM
z
A
545.105
0387:0
455.281
022)16387(:0
A
DCB
][360.844)(
][720.1688)(
inlbM
inlbM
xzB
xzC
−=
−=
A](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-116-320.jpg)

![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA113
DIAGRAMAS DE FUERZA CORTANTE Y DE MOMENTO FLECTOR
PLANO xz
DIAGRAMAS DE FUERZA CORTANTE Y DE MOMENTO FLECTOR
VALORES RESULTANTES DE MOMENTOS FLECTORES
Punto A Punto B
inlbMxzPlano
inlbMxyPlano
A
A
.640.9341:)(
.860.7747:)(
=
=
inlbMxzPlano
inlbMxyPlano
B
B
.56.13531:)(
.092.4925:)(
=
=
Momento resultante en el punto A :
inlbMMMMM AAxzAxyAA .1213764.934186.7747)()( 2222
=⇒+=→+=
Momento resultante en el punto B :
inlbMMMMM BBxzBxyBB .1440056.13531092.4925)()( 2222
=⇒+=→+=
DETERMINACIÓN DEL PUNTO CRÍTICO
De la figura siguiente y recordando el análisis descrito en el problema 9, B es el punto crítico:
][: lbUnidades ].[: inlbUnidades
1016
C
BA
157.1353
Bz
Oz
212.205
O
20
)(082.467
0157.1353212.205:0
)(027.1615
0)46(157.1353)36()20(212.205:0
+↓=
=+−−=
−↑=
=−+=
∑
∑
Oz
BzOzF
Bz
BzM
z
O
][: lbUnidades ].[: inlbUnidades
CBO A](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-118-320.jpg)


![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA116
DIAGRAMAS DE FUERZA CORTANTE Y DE MOMENTO FLECTOR
PLANO xz
DIAGRAMAS DE FUERZA CORTANTE Y DE MOMENTO FLECTOR
VALORES RESULTANTES DE MOMENTOS FLECTORES
Punto A Punto B
mNMxzPlano
mNMxyPlano
A
A
.380.37:)(
.027.49:)(
=
=
mNMxzPlano
mNMxyPlano
B
B
.806.13:)(
.371.13:)(
=
=
Momento resultante en el punto A :
mNMMMMM AAxzAxyAA .652.61380.37027.49)()( 2222
=⇒+=→+=
Momento resultante en el punto B :
mNMMMMM BBxzBxyBB .220.19806.13371.13)()( 2222
=⇒+=→+=
DETERMINACIÓN DEL PUNTO CRÍTICO
De la figura siguiente y recordando el análisis descrito en el problema 9, A es el punto crítico:
][: NUnidades ].[: mNUnidades
][: NUnidades ].[: mNUnidades
150400
C
B
A
O
Cz
220
Pz
Oz
300
)(599.124
0220:0
)(037.92
0)850()700(220)300(:0
+↓=
=−+−=
−↑=
=+−=
∑
∑
NOz
CzPzOzF
NCz
CzPzM
z
O
CBO A](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-121-320.jpg)


![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA119
Pasando la carga de N1370 (dirección horizontal) al centro del eje, obtenemos el segundo diagrama de cargas que
se muestra en la figura anterior, en donde se presenta un momento M , cuyo valor está dado por:
mNMxMrM D .5.20515.01370.1370 =⇒=→=
Entonces:
↓=⇒=−−+−
=−−+−=
↓=⇒=+−−
=+−−=
∑
∑
NAyAy
CyFyAyF
NCyCy
MCyFyM
y
A
6.1781013704.463198
01370:0
4.4605.205)4.1(1370)1()55.0(3198
0)4.1(1370)1()55.0(:0
DIAGRAMAS DE FUERZA CORTANTE Y DE MOMENTO FLECTOR
Recordando lo expuesto en el capítulo 2, el momento M es negativo (s.c.r); esto último es muy importante para la
construcción del diagrama de momento flector.
PLANO xz
Por conveniencia, acomodando el sistema coordenado de modo que las cargas sean ahora positivas hacia arriba y
negativas hacia abajo, tenemos:
Tanto la carga de N475.839 como la de N1370 actuando ya en el centro del eje, producirán esfuerzos normales
de compresión en el punto A , con un valor igual a su suma. No obstante, este último esfuerzo mencionado actuará
con una fuerza de N1370 en las proximidades derechas del punto B y en todos los puntos hasta llegar a D .
Los efectos que las fuerzas horizontales (axiales) causan en el eje serán discutidos en el capítulo 10, en el tema
referente a Rodamientos.
Entonces, pasando la carga de N745.839 (dirección horizontal) al centro del eje, obtenemos en el segundo
diagrama de cargas de la figura anterior, un momento M , cuya magnitud está dada por:
mNMxMrM B .936.20925.0745.839.745.839 =⇒=→=
________
* En el plano xz se considerarán todas las cargas y se describirá algo muy importante.
25.0
D
CB
40.045.055.0
5330
1370
475.839
265.1175
Cz
Az
A
D
C
475.839
Cz
B
M
1370
5330
40.045.055.0
A
Az
265.1175
⇒
][: NUnidades ].[: mNUnidades](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-124-320.jpg)
![ESPOCH INGENIERÍA MECÁNICA
________________________________________________________________________________
DISEÑO DE ELEMENTOS DE MÁQUINAS I DISEÑO POR RESISTENCIA ESTÁTICA120
Entonces:
↑=⇒=+−−
=+−−=
↓=⇒=++−−
=++−−=
∑
∑
NAzAz
CzAzF
NCzCz
MCzM
z
A
805.287005330540.7025265.1175
05330265.1175:0
540.702505.2057462396.646
0)4.1(5330)1()55.0(265.1175:0
DIAGRAMAS DE FUERZA CORTANTE Y DE MOMENTO FLECTOR
De manera similar al plano xy el momento M es negativo.
VALORES RESULTANTES DE MOMENTOS FLECTORES
Punto B Punto C
mNMxzPlano
mNMxyPlano
B
B
.943.1578:)(
.8800.979:)(
=
=
mNMxzPlano
mNMxyPlano
C
C
.2132:)(
.5.342:)(
=
=
Momento resultante en el punto B :
mNMMMMM BBxzBxyBB .286.185815799.979)()( 2222
=⇒+=→+=
Momento resultante en el punto C :
mNMMMMM CCxzCxyCC .336.215921325.342)()( 2222
=⇒+=→+=
DETERMINACIÓN DEL PUNTO CRÍTICO
De la figura siguiente y recordando el análisis descrito en el problema 9, C es el punto crítico:
Note que el punto crítico está dentro de los límites donde se produce la torsión, es decir, dentro de los puntos donde
están montadas las poleas.
][: NUnidades ].[: mNUnidades
CBA D](https://image.slidesharecdn.com/191720244-diseno-de-elementos-de-maquinas-ivan-moran-170314173107/85/191720244-diseno-de-elementos-de-maquinas-ivan-moran-125-320.jpg)