Descargado 2012 veces
![C
o
f,:
,{)
*
c'
{
p
. UNIV]ERSIDAD AUTONO¡4A
TOMAS FRIAS
INGENIERIA CIVIL
ANAI,I§$ N§TNUüIUNAI,
APUNTIS Y PNOBI,IMA§
clll 204
fng. Nelson áonzález Villanueva
R.N.r. 5277
Potosí,"2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-1-320.jpg)



![APU¡rttsS y fJtuutEiltirs uE ESUUUiUa§ n¡pctcsrau€§
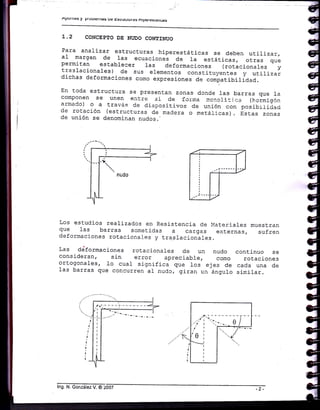
1.10 TEORIA GENERAL DE BARRAS SOMETTDAS A FT'ERZA NOR!4AL
Para barras sometiCas a fuerzas normales que originanesfuerzos l_nternos que no superar e1 l_imite álástico, sepresentan deformaciones rongitudin"l."
_-
;"
-iL""io.,
ocompresión iguales a:
I;=¡r I
IE.Ai
donde:
1.11 TEORTA GENERJA]-
TA}¡GENCIAI,ES
dx
+----------r-
FT
llrlv I
t l-l
'-r- i I
"-.il-r
^
Módulo de elasticidad
área de 1a sección transversal
DE ELEMENTOS SO},ETIDOS A II'ERZAS
é
é,
e
e
U
e
é
€
é
€
€
e
é
I
vl
Por la Ley de
además:
ent.onces:
Aislando un trozo de barra
sometida a flexión, el
V esfuezo originado para .....
fuezas tangenciales es:
dy
V.S
l.b
flooke:
donde:
r = G.7
tr
u--
2.(1 + ¡r)
_ V.S
G.t.b
1
G
,=dY dY
r-di
dvv: Kr !-
dx ' G.A
V.S A.S V
G.t.b t.b G.A
donde: k.=4-l' l.b
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-10-320.jpg)

![APUilteS y pf uutgttEs ug EStruqtuta5 ntpctesrauÉs
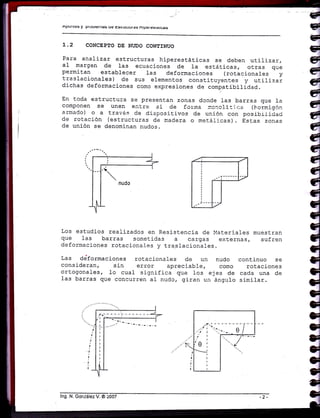
1.13 TEORIA GENERJAT DE ELEMENTOS SOMEÍIDOS A TORSION
Aplicando momentos torsores a barras de sección transversal
circular, en 1as cuales no se produce alabeo:
(
E
q
q
q
q
q
q
q
(
(
{
(
(
{
{
q
f
t{
{
q
q
I
tII
T
q
II
I
t
Aislando una sección
sometida a torsión, el
esfuezo originado para
esta solicitación es:
a=rd0 l
Id0
¡ Y=r' '
a=vdx I dx
,)
do: T.dx
G.J
t = G'y
T
G.J
tdO
'GdxPor ]a Ley de Hooke:
además:
donde:
de
r.-dx
L_ moÍ'.ento torsor.
módulo de el-asticidad a cortante.
momento de i-nercia torsional de 1a sección
transversal respecto del eje y.
módulo de Poisson
lng. N. González V. @ 2007 - 10](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-12-320.jpg)
![ApurtES y ptuutcil¡a5 ug tr§t¡uutura§ ntptstB§tdrrÉs
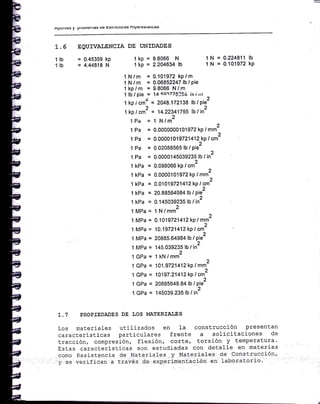
Valores de1 momento torsional
secc:.on:
.f para diferentes formas de
Sección circu].ar:
Sección eliptica:
Sección triangu!-ar eguilátera:
Sección rectangr.rlar :
@1" I.r= *.aa I
I 32 I
|l-'---.------'---l
l- a'.b' I
I a2+02 |
rÍifEa{4rz
'2b
Jz"
donde:
hJ," f-:+;l
I
a
t:::.:.:::.:.:.:.:.:.:l:.:.:.:::::t:::::::.: I I
.-..*-.t!-*..Ji
I
+_---E+
l- _
^Z-
3
,'-1? 3,,,iu É "'n#,](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-13-320.jpg)
![Apunrc§ y Pruurcfilé5 uc Esuuutula§ n¡Pcltr§talluas
CAP. 2 TRABAiIO Y ENERGIA
2.L §OtICITACIONES EN ELEMEI{TOS ESTRUCTURA],ES
Cuando se aplican cargas sobre cuerpos elástj-cos, se originan
en el1os esfuerzos internos tales como tracción, compresión,
corte, flexión y torsión, según los planos en 1os que actúen
dichas solicitaciones internas.
E1 gráfico adjunto muesEra esEas solicitaciones:
e"T
2.2 TR;A3AJO
Al actuar una fuerza constante
originar sobre e1la un movimiento
por eI desplazamiento 6, genera un
mediante la expresión:
F sobre una partÍcu1a y
de traslación determinado
trabajo /(externo) definido
F----------+o--.. w = F.6 + dvq = F.d6
-+-----------t-
6
Cuando actúa un momento constante M sobre una particula y
origina sobre ella un movimiento de rotación definido por e1
ángulo de rotación 0, origina un trabajo externo definido por:
¡¡ (o,,:....
/ 6
I,I = 'M. 0 dW = M.d0](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-14-320.jpg)
![^PUil(tsS
y P¡Uurelila5 Ur trSUUUtUra§ nrPErtsSHUgS
2.2 -L TR,LB.EJO EXTERNO DE UNA EUERZA NORMAI,
Aplicando una fuerza gradual P sobre una barra prismática, se
origina una deformación A determinada por 1a Ley de Hooke a
través de Ia relación:
EI trabajo exLerno originado por
esta fuerza es:
PL
a=- +EA
we = J e.oa
w" = tEA.¡.a¡ =El 12 =
áL 2L
p=El oI
EAA A
f;t;I (rey de C].al}eyron)
I
I
I
l
1
1
i
2,2.2 TR,A3A.'O EXTERNO DE UNA FUERZA TANGENCIAT
l"ü
d
v
v=9 A
v
k.x -
E1 t,rabajo exLerno es: We =J V'AY
*" =
}H y oy =
e-:l ,'=?Y ;
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-15-320.jpg)

![AFTUiltCS y lIUUtCtItaJ ue trsüUUtUtA§ ntpErE§tát¡G§
2.3 ENERCTA DE DEFOR!,IACION
En el- estudio de Ia energ:ia, se establece que ella no se
pierde, sino que se transforma; en el caso de un elemento
sometiCo a un sistema general de fuerzas, e1 trabajo Ce todas
1as fuerzas se transforma en energia interna de deftrmación.
Esfuerzos normales: Considerando un elemento e1ástico
diferenci-al : W:U
Para esfuerzos normales:
we = 1'P'6
2
además,o"=? 3 p=Gn.A
^t =r- = A- e.L
deformación es:
u =1(or,.A) (r,L) L
2
on. E. L. A
Siendo V=A.L (volumendelelemgnto): U= 1 o..r.,
considerando ]as tres d.i¡nensiones der elemento diferencial:
dUonx
dUonr
dUom
1
2
1
2
1
2
onx. gx. dx
ony. Ey. dx
onz . tz. dx
dy dz
dy dz
dy dz](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-17-320.jpg)
![AfJUil(CS y ptUU|CIta5 Ue E§uuututaS ntpctestauɧ
La energia total de deformación para esfuerzos normales será.:
dU:dU6n**dUonvldUo.z
O, :
I I G.*.r* r ony.ey+ onz,rz ] dx dy dz
u = i llf "",.'6x
* 6nv'€y* or,,'e, I dv
Esfuerzos tang'enciales :
Para fuerzas tangenciales:
Considerando un elemento e1ástico
diferenci-al : W:U
P1ano x-y:
uyx - l,xy
x
P
^vx
t=rxydxdz
Av* = y*, dy
1
owe=-
2
por otra parte:
dx.dz
, :A'*rxY ¡trr
trabajo externo será:
1-
dwe = 1r,,.. dx dz y.... dv
1
i'"-Y T*Y dx dy dz](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-18-320.jpg)
![AfJUlrtcs y pluulÉilras (lc Esuuurul᧠nlPslcstauE§
Considerando las tres dimensiones de} elemento
{
I
{
(
{
-t
(
I
{
{
(
{
I
il
1
{
I
!
{
{
{
{
{
I
(
I
(
(
{
{
!
{
{
dU
du = it
duirxy = : f* T* dx dy dz
duirr, = ] fy, Ty" dx dy dz
duir*, = ] a*, ^l*, c--: di. dz ,"
escribirse de otra forma, ello
Ley generalizada de Hooke, 1a
sonetido a esfuerzos normal-es Y
diferencial:
La energía total de deformación para esfuerzos tangenciales
será:
- dUir*y + dUilr, + CUil*,
7* T* + xy, Ty, * a*, T*, I dx dY cz
IJ= 1
2 fff,t", ^{xy * ayz Ty. + rxz Yxzl dv
Si ahora determinamos la
elemento sometido tanto a
La energia total interna
diferencial se obtiene su¡r'ando
energia total d'e deformación Para u=
esfuerzos normales y tangenciales:
a lmacenada por
ambos efectos:
eI elemento
Esta expresión también Puede
se consigue recurriendo a Ia
cual se aplica a un el-emento
i IIf Gnx rx + ony Ey + on, t. I ., - t
fJJ,t*v
Y*v + rvz^lvz+ rxz Yxzl dv
u=
tangenciales:](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-19-320.jpg)
![APU¡rtE§ y ptuutc[tas uE ESUuututa§ ntpcr€§ra[a5
Esfuerzos norma]-es:
Según el eje x:
Según el
donde:
donde:
donde:
on*
ty=-p
e.:-$
6ny
"y ¡1
t*:-Fty
6, = -lr Ey
tx
ex
e]e y:
z
eJe
z
on,
¿_ - I-
E*:-PEz
Ey: -$Ez
il,j
!
l](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-20-320.jpg)


![A[ruIttss y ptuutcillir§ ue csuuurutas nt¡Jete§táuua§
2.4 ENERGIA DE DEFORI,ÍACIóN EN BARRAS
La energía interna se puede determinar para 1os casos máscomunes de solicitación áe ta
"iá"ll"a. manera:
2.4.1 Barras sometid.as a fuerza norma]-
,|
Uru=j.e a ::> dui{=i.,-.cl
Por la Ley de Hooke:
fuerza tangencial
u, =*r., =) duy =1y.6,
Por 1a Ley d.e Hooke:
or=H*
oa==!..0'
o2
u¡¡ =fr..o u"
=i ou¡¡ =
]ur.ce
Hooke:
a ¡nomanto flector
u¡, =
]M
e
Por la Ley de' ( r-------¡) ,
ds
do = -!t ¿.
EI
PE,
¡
I D "^2duN =
áP
.
E;o' =
7ff o.
2.4.2 Barras sometidas a
l,I
dy
2.4.3 Barras sometiCas
or, =*u.g#"=**á
f ,. uv = JlIv' .ds
,* =lrh o'
aunr=*u#0.=j$0.](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-23-320.jpg)




![AIJUI¡tss y IJluulclllas uE EsUUCtUlas nlpElts§tatl*S
EjempJ.o:
e interiores b6 x hs-
Encontrar el factor de forma k1 para una secqlon
rectangular hueca de dimensiones exteriores b x h
v
I
bo:bo
ai)
+---j-------+-
]----¿--#
b¡b
;;
Para Ias
dA1 = 5.'6,
alas:
bx =b
h
;
h
I
+
hol
:llt
I
' "'I'
hol
-;l
T
-dv
I'
lx
sr
= !rf -v2r
Para el alma:
dA2=(b-be)dY ; by =(b-bo)
^ bh2 -boho2 b -bo ..2
"2=-----l-,
h
*,=4r?
lx' ho
2
*,*-,"'._-e__
h
xr=4 r 'r r*-r'r'| ¿ 4 ,' .+
rx o6
f ,¡n2
-!ono2 _b -!o ,272
¿v*f #b-bo)'d,l
ó (b - bo)'
'{
-v2aYl
ho
dy*b-;bo Í-o
2
Resolviendo las integrales:
bo
Denominando: ffi =- Y
b-
Sección rectangular donde:
Sección rectangular donde:
I
bo= ho
.bDo:1,
m:p=
1
m=D=-'2
ho
n
.hno=i i
0= kt=L'2
+ kr = 1.548](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-28-320.jpg)

![APUlltE§ y Pluultlllas UC E§uuutulaS nlpclc§láuq5
Por f]-exión:
Por e1 PrinciPio
1 .-.
W. : - (u)
-2
de conservación
4Aa
energia:
^i=
de la We:Ui
2304
4 ae :-ET- =
Por fuefzas Eangenciales (cortantes) :
W.: l tal ao
2-
:4ae
Por el princiPio de conservación de 1a energia: We:Ui
, a 192.k1
GA
Si Ia viga en estudio
rectangular constante de
E : 2. 1.107 'rlm2 Y módulo
A = 0.30'0.60 = 0.18 m2
una sección transversal
un móduIo de elasticiciad
= 8.4 . 106 T,/m2 :
GA= 1.512'1067
Et =1.134.105Tm2
tuviese
30 x 60 cm,
de corte G
I =
0.30'-(9.60)3
= 0.0054 m4
Las energias internas para cada solicitación serán:
Por Elexión:
Por Cortante:
2304
-=o.o2o3174Tm
1.134.10"
192 1
- =o.ooo1269Tm
1 .512 . 1ob
Ui =0.0204443Tm
Ui=
Ui=
Energia interna total:](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-30-320.jpg)











![AputtttsS y Ptuurcilras uc c§uuululas nlPtsrcsr¿uÉs
vrj P: .6j (Trabajo real)
. Aij (Trabajo virtual)$I,. = Pr
efectuado por ambos sistemas de fuerzas
1
2
E1 trabajo total
graduales será:
w=
1
w :Z- Pi ,6;.
i.l= + $I. =.) L)
'Pr '6j +
gradual
Sli +
1
+z Pi 'aij
de fuerzas "Pj ", e1
wj:1
Z
P:'61 (Trabajo real)
Aplicando a continuaci-ón
mantenj-endo aplicado eI
será:
D. D.!1
de fuerzas gradual "Pi",
fuerzas "Pj ", e1 trabajo
P:" - 6i (Trabajo real)
'Ajr (Trabajo virtual)
eI sistema
sistena de
Ili
Jr
=1'.;¿
=P.
EI trabajo total efectuado por ambos sistemas de fuerzas
graduales será:
t^]=
wj*
*1
z
1
z
I^]=
'Pi'6t
w. + t¡l-.¡ Jr
.P, .6- + P, ,4,..) ) r rJ
6i Ajl
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-42-320.jpg)


![= €
.
q
q
q
q
a
ó
4
G
G
G
1,
q
q
q
q
q
C
G
G
G)
G
C
q
C
C
G
IG
til
ffi
llr
tI
ti
ll'
lt
i
H
I
i
i
t
Apuntes y problemas de Estructuras H,perestát¡cas
3.2 PRINCIPIO DEt TRABA.]O VIRTUAI
E1 principio de1 Erabajo virtual fue desarrol-Iado por 'Juan
Bernculli en L7L7 y también es conocido con eI nombre de
Método de la Carga UniEaria.
A1 igual que oEros métodos de cáIcu1o para estructuras
hi-peresEáEicas, se basa en e1 principio de 1a conservación de
1a energía (We = Ui), de esta manera permiE.e establecer un
medio general para obtener un desplazamiento o rotación cie
a1gún punto de una estructura.
1o) Si sobre un cuerpo deformable aplicamos una serie de
cargas externas P, elJ.as se transmiten a 1a estructura,
originando 1a aparición de fuerzas internas u.
2") Es necesario que 1as cargas exEernas P y 1as fuerzas
inlernas u queden relacionadas por ecuaciones de
equilibrio.
3o) Las cargas P, en sus puntos de aplicación, origin:n
desplazamientos externos A y 1as cargas internas rr
originan desplazamientos internos 6 en cada punto de
carga j.nterna.
4') Los desplazamientos e:.:ternos y los desplazamientos
internos deben estar relacionados entre si por
ecuaciones de conpatibilidad de desplazamientos.
EI principio de Erabajo y energía esEablece. '"':-oE
Trabajo de 1as cargas ext.ernas = P, A
Trabajo de 1as cargas internas = u - 6
Por e1 principio de conservación de la energÍa, e1 t.rabajo
que efectúan las cargas externas es igual a1 t.rabajo de 1as
cargas in"ernas, cumpliéndose que:
»P'^ = Xu.6
Estudiando un cuerpo sometido a cargas externas reales P,
suponiendo gue los soportes del cuerpo no pueden contar con
pcsibilidad de desplazamienlo, pero que eI material puede
deformarse de manera irrest.rict,a más allá de su 1Ímite
elást.ico:
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-45-320.jpg)







![Apuntes y probtemas de Estructuras H¡persstáticas
Traao
N n L A NNL/A
kips k].ps inch inch2 k2linch
AB 69.3333 0.8889 86.40 8.00 665.60
Br 6B.UUUU 0.4444 86.40 8.00 326.40
CD 6U.UOUU o.4444 86.40 8.00 326.40
AE -86.6667 -1.1111 '108.00 10.00 1C40.00
BE 37.0000 0.6667 64. 8.00., 1
BF 1.6667 0.5556 108.00 8.00 12.50
CF 30.0cc0 0.,.-rCr10 ñ4.AC I ?.00
108-00 r
- -lu.uñ
0.00
)F -85.0000 -0.5556 ¡ lñ nñ
szz¿aEF -69.3333 -0.8889 86.40 't0.00
Aplicando 1a exPresión del
k
1r
I = 3613.18
trabajo vj-rtual:
361 3.1 IAD
" 29000
AB, = 0.1246 inch = 0.32 cm = 3.20 mm
I
Ejeurplo: Ha11ar eI desplazamiento vertsical del ando B &
Ia armadura de Ia figura, si las barras ¿'1
cordón inferior sufren un cambio de Eerq)eratura de L:lt'F-
considerar Gg = 0.000006 1,/"F
,rl^
E1 aná1isis se efeeEúa bajo dos siEuaciones, Ia primera
tomando en cuenta 1as cargas reales y 1a segunda considerando
1a carga virtual P'= 1 k actuando en B.
-é,
é
Cq
C,
G
C
G,
C
G
á
4
G
If
q
{r
={t
;
¡
q
q
q
q
q
q
q
(
(
(
(
(
{
It
a) Fuerzas reales (N) b) FuerzaE virtuales (n)](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-53-320.jpg)





![Apuntes y problemas de Estructuras Hiperestáticas
AngrrJ-o:
1oe
E1 trabajo de
EI trabajo de
Por eI
además,
I
lr
ftr
--;7-
+_x_t
: ltol.t-t.rl.o*
ó Er
* l(-,r.(-p.r).0* -
á E'l
CB:
BA:
0<xl
b<xS
m0=0
me= -l-
p2r-3
6Er
3.5 TRABA.'O VIRTUAT PASA ELEME}TTOS SOMETIDOS A E'T'ERZA
rA}¡GENCIAI.
Para un elemento sometido a fuerzas tangenciales, se apliea
una fuerza tangencial virtual unitaria, en eI punto donde se
desea determinar dicha magnitud, entonces:
una
una
fuerza tangencial vj-rtua1 es: 1.4
fuerza tangencial interna v es: v. dy
análisis de fuerzas tangenciales: dy= k!v-V.ó(
,. G.A
eI principio de conservación de Ia energia fle : IIi:
1.¿ = [
k1 '''V .d,
J G.A
(3.8)
3.6 TR,ABAJO VfRTUA], PARA ELEME}flTOS SOMETIDOS A TORSION
Para un elemento sometido a torsi-ón, se aplica una momento
torsor virtual unitario, en' eI punto donde se desea
determinar dicha rnagnitud, entonces:
El trabajo de una momento vj-rtual unitario es: 1.4
E1 trabajo de un momento torsor interno t es: t,d0
Por el análisis de momentos torsores: d0 = tl .O*, además,J G.J
por el principio de conservación de Ia energía t¿,le : Ui:
lng. N. GonzálezV. @2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-59-320.jpg)

![Apuntes y problemas de Estructuras Hiperestáticas
3.8 TEORE!,IA DE CASTIGLIANO
Si sobre un cuerPo
elástico- actúa u:i
sistema' de "n" fuetzas,
e1las originan que el
cuerPo sufra
deicrmaci;aes traducidas
en desPlazamieotos Y
rotaciones.
Para una fuerza arbitraria Pi, la Ley de Clapeyron nos indica
que el trabajo externo originado por dicha fuerza es:
1_.
vte = -- Pi 'Ai
Para todo eI sistema de íuerzas, e1 trabajo total
Por otra parte, e1 principio de conservación de Ia energia
establece que e1 trabajo externo es igual a la enerEia
interna de deformación:
será:
+Pn^nl
r¡t^ = = Ui
u:1 f p, A, + P2 Lz + .... + P1 A, + Pn-r An-t + Pn An lu :
á,
11 a1 - E2 "2 ' -1 -t -r¡-t ¡¡-r
4,
Para materiales elásticos, Ia fuerza es proporcional a 1a é'
deformación, pudiendo escribir esta relación como' A,
D.a
A, =; é
=1 i ) ^ ] ¿ | nz 1 ii
u: i[Pr2 + Pr? + + P,2 + Pn-r2 + Pn2 ) A
2K
l¡
:É](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-61-320.jpg)




![Apuntes y problemas de Estructuras H¡perestáticas
7
M* = 6 12 coscr. dcr = 6 r2 senO
Con estas expresiones encontramos:
- 612(l-cos0) .l-cos0.x= ' '=r(-)
610 e
- 6r2sen0 -sene.
V= ore =r( , )
Analizando en planta:
-xcoso= r.(1-;oto)
^ -0-coso..
-senu : f .l-_-]
'0í
:
AM
;:=fSeDU
dY
dli aP=L
,*=r(1-cos0)at
determinan de Ia
,=ysenO
v=4-ycos0-x
Las solicitaciones serán entonées:
Momento flectors M = 6 r2(1-cos0) + p r sen0
Cortante V=6r0+p
Momento torsor: T = 6 x2(0-sen0) + p r(l-cosg)
Las deflexiones en e1 extremo libre se
siguiente manera:
Por flexión:
Por torsión:
ÍU¿
6sNr: J
0
por cortante: ouu='l2rr o't'r't'oe -
6.13.sen0'(1-cosg).r.d0 : 3.14
EI
2.4674011 . .12
GA
*_- - "(2128. (0-seno).(1-cos0).4.d0 _
-Br-¿ *
:
lng. N. González V. @ 2007
0.3258084468 .r4](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-66-320.jpg)
![si no se
res ul t acos
efec-rúa ',.:n anáIisis nu::réricc, ie
es clificulccsa, por e11o asunj'remos
E=2. 1'10'T/:n-
G = 8.4 ' 10' T/¡:1-
b = 0.20 ra
h = 0.30 n
r = C.00C45 !r''l
:
A = U.Ub rn
r- - i ) - -i'A
J = 0.00065 ma
coir.paraciór de
los si-guientes
E
(n)
6s en llJir.
F]"exión
(t)
Carta::t.e
(ri
Torsióir
(t)
Total
(s)
í,ñ
191.11?74
63.85
0.44C41
0.'1.1
1i1.,39177
JO,U i
31 0.73807
100.00
an
25.71425
63.69
0.1 5362
0.39
11.50027
35.9?
40.37317
100.00
1.0
0.31746
61.75 3.43
0.1 7902
34.82
0.51410
100.00
0.5
0.01s84
ÁÁ óo
0.004.í1
14.43
0.01 1 19
31.57
0.0112
100.00
0.1
0.00003
14.05
00ci 3
78',Jz
0.000c2
7.92
0.00023
100.cc
La ciefcrnacióa to-tal C:L p"rn:c anali'zado es la su¡rLa CQ 1as
ciefornaciones obt,en:-ias ¡-';ia cacia iipo Cr: esfuerzo'
üu=t5r,',+E.-+6",
De es|.a rleneía para un arco lcn ra(iio cie 3 meL]:os,
6B = 25.?1 + 0.16 + fi.50
q
E
e
E
¡
q
I
¡
T
T
I
{
q
E
(
f{
lng. ¡,¡. González V. @ 2007
-bJ-](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-67-320.jpg)
![Apuntes y problemas de Estructuras Hiperestáticas
Ejearplo: Determinar 1a flecha en el centro de 1a viga
si 1a temperaEura en 1a parte superior es
Tr = 45oF, 1a temperaEura en Ia parte inferior de 1a
viga es Í2 = 115oF Y e1 coeficiente de dilaEación de1
material es 6.8 * 10-6 17'¡r
I
a-#
T
l:l
-
0.5 0.5
,_ =
T1 +T2 _ 45+115 _ rO ,,fr__ 2
_
2 ,
1zg 2.]x.a.aT¡¡
1'Ac' - I '-
""0'*
0
integrando y sustituyendo valores
20' -
0lx
10<x
< 10:
< )o.
1
2
1
m= '110-x)
2',
- Tr-Tr 115-45"-- '- =35
120 2.1(lo-x).o.trm
I ¿ .d,
Jh
0
en 1as mismas unidades:
Acr=0.8568" =rrr;l
Ejemplo: Determinar 1as reacciones en Ia viga si eI apoyo
B sufre un asenE.ami,enEo de 5 cm hacia abajo.
Tomar como módulo de elasticidad E = 2.5'106 X/mz y momenLo
de inerci? I = 0.0045 ma.
/4. R _A_ l
-.m 77772
10.0
diagrama de deformación
8.0
T1 = 45'F
T2 = 115'F #,
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-68-320.jpg)



![Apuntes y problemas de Estructuras Hiperestáticas
CAP.4 METODO DE I,AS FUERZAS
4.1 DESCRIPCION GENERAL DEL METODO
Este método basa su enfoque en la determinación de las
fuerzas y momentos en los apoyos de Ia estructura
(redunCantes), o de 1as fuerzas internas en cualquier punto
de la estructura, de la siguiente manera:
Estructura rea].
x1
-ii, *'
6zz I
x1
6er
ESÍRUCTUMBASICA ESTRUCTUR.ABASICA
+ CARGAS + I'REDUNDANTE
x2
Estructura básica
(2t
6rz
ESTRUCTUMBASICA E§TRUCTURABASICA
+ 2'REDUNDANfE + s'REDUNDANTE
(1) +
6:z
¡zoI
6
x2
r!
--LU
lng. N. Goirzález V. @ 2007 -68-](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-72-320.jpg)
![Apuntes y problemas de Estructuras Hiperestáticas
Por compatibilidad de deformaciones en e1 apoyo A:
6¡r=o
6v:o
0=0
6ro + 6rr xr + 612 x2
6zo + 6zr xr + E2Z x2
6¡o + 6¡r xr + 632 x2
611 xl + 6n xz + 6r:
6Zr 1<r + 622 x2 + 6z:
6ar xr + 6¡z x2 + 633
en forma matricial:
(4.1)
+ 613 x3':0
LlI e¿:
+633x3-0
x:=-6ro
x¡=-6zo
x:=-6¡o
I
)
t6itl.Ix1J = t-6io]
donde:
[6ij] = maEriz de flexibilidad
.In.! 'fn.i
6i.i= I . rds 14.2)¿JJEI
[xiJ = vecE,or de fuerzas redundantes
t-6io] = vector de términos de carga
, 6io= JPo" (4.3)
tng. N. González V. @ 2007 ' oY '
:"lti: l I Il ]
6r,
6r,
6r,
I 6,',.
[3:l](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-73-320.jpg)
![Apuntes y problemas de Estructuras Hiperestáticas
Ejemplo: Encontrar 1as reacciones
vi-ga con EI constante.
para La siguiente
]__ 10, ro' t
tl
rF;T,_;+i*,IY
111
22
6zo+622x2:0
Grado de
12Wpie
hiperestaticidad = 1
12 Upie
ta ecuación de compatibilidad es:
TRAMO ORIGEN LIMITE Mo a2
AB
CB
A 0-1 0
0- 10
90x
)
-bx
30x
-rtX
-Lax
x2
6ro - Jucr2-.6s
6rz = P¿.0'JEI
Término de carga:
- 1o(e0.x-0.x2¡.(-**, r0(ao.x) (-].x) 7500
6..=t dx+Í 2 {x:---
óE'óErE.l
Término de la matriz de flexibilidad:
6". =
,?n*,r'
o**
,lr-l,r'
o* _ 5oo + 5oo _
é E, ó Et 6.E.t 6.E.t
Planteando l-a ecuación de compatibilidad:
5000 12500
E.t E'l
500
3€.1
12500 500
--+-X, = U
EI EI
lng. N. González V. @ 2007
= Elr.-rl](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-74-320.jpg)








![Apuntes y problernas de Estructuras H¡perestát¡cas
Términos de Ia maEriz de flexibilidad:
)
- 6.. = {mf-¿r=
JEI
211.1111
+
E
u',=
I-# "
.
]tt#r.n*
.
T.,-#;E
* .
]##
o,
.. 11520
Orr= ----=- +
E
2488.8890
+
E
28800 30300
+-=_EE
C,
C
C,
d,
G,
c
é,
C
c
c
c
35.1852 2880¿
-
f _.EE. 2880
o.-¡J =
E
6210...=_
E
471.4078
-------.=-
E
8
6rz= [----
6*
-.
d, +
J0.00005(x
+10)oE
§ 1 185.1850 314.8148¿_L¿EE
- 6,, _ [*, *, d*
EI
c c 30300
oz¡.= Ó:.2
= E
2
6.. = [rz-¿.x
JEI
8-t10"0
6.- = l' *' = .¿r* f *'¿¿ I a
ülo,oooos(x
+ 1o)rE ¿f
o.oooos«* + r0)3E
'dx .
J*i#
*
e 891.5389
o^^=_+
E
11520 25740
EE
u,, =
i-uu*.,.i-rfo .". jrdr* *.]**';r.,.
414.8148
+- E
v. @ 2007
:i,
!
a.
;l
L](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-83-320.jpg)
![Apuntes y problemas de Estruc{uras H¡perestáticas
.dx +
0.00005(x + l0)3E
_ 1995
E
* -
]*#*..'
b
[----]g- d,
I 0.00625E
d
+l5.15
-6zs: J%Po,.
^ 197.5308 52.4691
-¿r E E
6210
- 6¡r:6r:= E
9850
- 6¡z= 6:¡= r
10
.ox + J
I
960
E
- 6¡¡:
6:¡ :
6:: :
El sist
2
['. d*
JEI
68
[--]-. ¿' * [-----]-
jo ooozse
-" jo.oooosix + ro)3e
960 69.1358 5.8642
EEE
ema formado es:
25740 x, + 30300 x,
30300 x, + 931 62.9461 x2
6210 x, + 9850 x2
+ 62L0 ,<3
+ 9850 x3
+ 1995 x3
I
46346 .6667
154013.2381
15404.4444
X1 = 3'99 ^
xz = 5'15 k
*, : -r't.85 k-Pl"
3.99
Ing. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-84-320.jpg)







![Apuntes y problemas de Estructuras Hiperestáticas
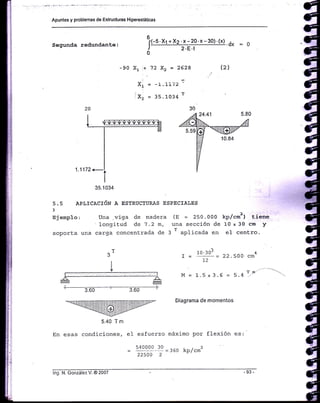
5.4 APTICACION A PORTICOS
Ejemplo: Considerando flexión ..r"o.rt.u.
para el siguiente marco.
1as reacciones
q
q
q
q
q
G
G
d
G
{
{
{
f;
q
q
dü
{
q
X1
Tra¡Io Orige Linites I M N/dxt ÁlAr/?¡a,
DC D 0-5 - Xrx -x
Xt'x¿
CB 0-6 1 /-5Xr-2x-+12x -5
25X1 + lQ¡12-60,«
AB A 0-5 1
- Xlx -x
Xl'x
Aplicando el principio deI trabajo minimo para elenentos
sometidos a flexión:
5o
2 [xL]'.¿* +
J E.I
0
250
-., X, + 150
Jratffr $=o
6¡1ru.x,
+ 10.x2 - 60.x)
J--; ¡-= ox = o
0
Xr+'120-1080=0
Xr = 1.54 ?
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-92-320.jpg)





![Apuntes y problemas de Estructuras Hiperestáticas
E1 nuevo esfuerzo por flexión.será
por flexión y compresión:
111000 30 2860
22500 2 300
ahora la suma deI esfuerzo
83.5 kp,/cm2
E1 momento flect.or máximo en Ia viga es:
1
M =:'.8-2.383)'7.20= 1.11 r-m
4
1.'t1
v Ia rtecha en et punto c es: ," =
(?9ol;=1t=1tl]3=o=t
= o tu cm
48.250000.22500
EI esfuerzo que soporta cada una de 1as porciones de1 tensor
de acero es:
3098
"" = -f = l-549 kP,/cm2 (tracción)
;-l!-r9!rl=oA EA'óX'
E1 esfuerzo que soporta e1 puntal de madera es:
2383
"o
:
lo
= 119' 2 kP/cm2 (comPresión)
Nota: A1 resolver esLrucLuras hiperestáticas, deben
comprobarse las Lensiones de trabajo de los materiales,
elIas no deben superar 1os valores admisibles. Cuando e11o
ocurre, deben modificarse 1as dimensiones de l-os elementos
auxiliares (puntal y t.ensores) hasta conseguir que 1os
esfuerzos de Lrabajo no superen a los admisibles.
5.5 API,ICACIóN A RETICULADOS
En e1 esLudio de retj-culados hiperestáticos se reconocen l"as
redundantes como reaccj-ones en los apoyos o fuerzas inLernas
en 1as barras.
E1 Método deI Trabajo Mínimo consist.e en
expres ión:
aplicar 1a
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-99-320.jpg)
![Apuntes y problemas de Eslructuras Hiperestát¡cas
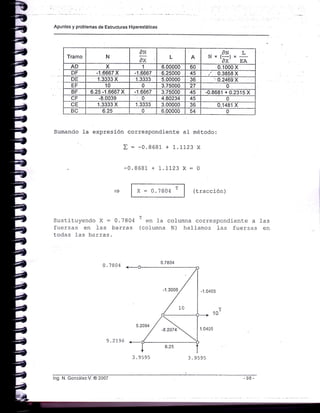
EJemplo: Determinar las fuerzas en 1as barras de1
reticulado tomandó en cuenEa eI mismo material y
que 1os valores del área de cada barra están indicados entre
paréntesis y se expre"ar,
"a,
a*'.
El reticulado cuenta con un grado
e1Io adoptaremos como redundante ]a
esta manera efectuaremos e1 anáIisis
de hisperestaticidad, Por
fuerza en Ia barra AD, de
de la siguiente manera:
10-x
lng. N. González V. O 2007
5 - 1.333 X 5 - 1.333 X](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-100-320.jpg)

![Apuntes y problemas de Estructuras Hiperestáticas
Tramo N
AN
Ax
L
aNLNx(-)x-
OX EA
AB 5.4000 - 0.3000 x -0.30 3.00 60 -0.081 + 0.004500 x
BC -0 60 300 bt, -0.324 + 0.018000 x
CD 10_8000 - 0.6000 x -0.60 3.00 60 -0.324 + 0.018000 x
DE 3 6t]f]f) - o ¿5no x .0.45 3.00 60 . -0.081 + 0.010125 X
EF 3.6000 - 0.4500 x -0.45 3.00 60 -0.081 + 0.010125 X
AG -9 (]0(}u + 0 5t]uo x 0.50 5.00 60 -0.375 + 0.020833 X
BG -0.40 4.00 60 -0.192 + 0.0'10667 X
BH -g 0000 + 0.5000 x 0.50 5.00 60 -0.375 + 0.020833 X
CH 0 4.00 60 0.000
DH -6 0000 - 0.5000 x -0.50 5.00 60 0.250 + 0.020833 X
DI 0 0 4.00 60 0.000
DJ 6.0000 - 0.7500 x -o 75 5.O0 60 -0.375 + 0.046875 X
EJ 0 0 4.00 60 o.000
FJ -6.0000 - 0.7500 x -0.75 5.00 60 -0.375 + 0.046875
GH -5 4000 + 0 3000 x 0.30 300 60 -0.081 + 0.004500 x
HI 7_2000 + 0.9000 x 0.s0 3.00 60 -0.324 + 0.004500 x
IJ 7.2000 + 0.9000 X 0.90 3.00 .60 -0.324 + 0.004500 x
Sumando 1a expresj-ón correspondiente aI método:
I : -3.062 + 0.313167 x
-3.062+0.313167X:0
x : 9.78 r (hacia arriba)
Sustltuyendo X:9.?B r en Ia colunna correspondiente a las
fuerzas en 1as barras (colunna N) hallamos fas fuerzas en
tocias 1as barras y por estática encontraremos Ias reacciones
restantes.
5,7 APLICACIóN A ARCOS
En eI estudio de arcos indeterminados se efectúa un recuento
de las incógnitas que se presentan y en dependencia de e11o
se determina el grado de hiperestaticidad de la estructura.
Luego se escogen l-as redundantes y se plantean fas
expresiones correspondient.es a las solicitaciones estudiadas
y qLre tienen efecto sobre el comportamiento de Ia estructura.
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-103-320.jpg)

![Apuntes y problemas de Estrucluras Hiperestát¡cas
Tramo M
4,,
ax
N
A'l
=-dx
ds
AB arco 15(1-cos0)-5 xsen0 -5 senO 0 0 5de
AB tensor 0 0 1 dx
EI
j
0
-375 .sen0 .(1 - cos 0)
n 1- 10
do+125.X. p9I-$6¡¡ f !l=o
d Er dEA
750 196.3495 .. 10
-:=.¡--r-i-IJ-.X+ - .X = 0
EI EI EA
dondeE:módulode
inercia de1 arco y A
tensor:
elasticidaci de1
es el área de ]a
material, f momento de
sección transversal del
A = 3.14 .10-a cm2
I : 3.6 .10 ' cm'
luego: X: 2.4r
5.8 ANTILOS DELGADOS
Se def ine con1.o ani ll-o delgado a una estructura plana cuyas
dimensiones longj-tudinales son mucho mayores a las
dimensiones-de su sección transversal.
En estas condiciones geométricas, 1os anillos principalmente
trabajan a flexión y es suficiente considerar cono
redundantes }os momentos flectores.
GeneralmenLe Ios anil-Ios son geométricamente simétricos y si
se encuentran sometidos a cargas simétricas, en las secciones
donde coinciden l-os ejes de simetria se consideran las
fuerzas cortantes nulas y solo se consideran como redundantes
l-as fuerzas normales y los momentos fl-ectores.
lng. N. González V. @ 2007 102](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-105-320.jpg)

![Apuntes y pfoblemas de Estructuras Hipereslát¡cas
Aplicando la expresión de trabajo minimo para flexión:
Ir *r*!t"-x)lds = 0
Simplificando:
En esta expresión se detectan dos
análisis de centroides de lineas:
integrales conocidas por e1
[."o
[:.-0
x1 fo. *
U
Pa
2
-: 2
Asi ]a integral
1."
- s , es Ia longitud de arco de1 anilLo.
mientras que 1a integral
estático de primer orden
representa e1 momento
i" a.
rc
de1 arco de anill-o respecto de1 eje "y"
jx.ds
Despejando f a redundante: x, :l¡-a--¿1
Jo'
La rel-ación entre eI momento estático de prj-mer orden
respecto del eje "y" y la longitud se define como coordenada
del cent::oide de ]a finea respecto del eje t'x ", fa
redunciante X1 se determina a través de 1a exp::esión:
P
Xr= [x,_-a]-2
Si eI anilIo fuese eliptico con semieje mayor a = 2 m,
semieje menor, b = 6 m. y carga P = 20Í, Ia coordenada X.:
1 . 64 4 m. , entonces :
lng. N. González V. @ 2007 104](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-107-320.jpg)
![Apuntes y problemas de Estructuras Hiperestáticas
X:. - 10(l-.644 - z) = -3.56 r-^
Si e1 anillo es circular donde r
coordenada X" : 1.9099 m., enLonces:
xl : 15(1.9099 - 3) =
3. 56
10
:3m.yP=30r,
-16. 3s r-^
1a
Si el anillo
dimensiones de
fuese un
m.yse
.P r6.ss
Y
15
cuadrado cuyas diagonales tj.enen
encuentra sometido a carga de 3T.
Para una linea rect.ar X" = 1 rn.
En consecuencia:
y : 1 q t] - ).r1 + 1t 1.50' "'
t.J
"l.
r.t
¡ 1's
Y
4
3
lng. N. González V. @ 2007
1.5](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-108-320.jpg)

![:.¡;:,.,
":'.
1' ::g:.!: . ':¡:: 'i'r::r '.";'r.: i,r' .''': .::;.',..."
l'' :t
-
epunted"y problemas de Estruc{uras Hiperestáticas
B
o.
qffi
EI momento flector
en un punto D
de abscisa rrx'r
y ordenada try" es:
AM
i --:
i/Xr
flexión:
M: -Xr- Qa(a-x)+
Aplicando la exPresión
1o(.-x)2 + Lor'
2 '' 2 -'
de trabajo rninimo Para
,*--r-
qa(a-x)+]rru-*t' *l qy2 I (-1)ds : 0
qa ¡uo" -
'o
2ds:o
'*o')ds:o
En esta expresión se detectan también integrales conocidas
por el análisis cte centroides y momentos de inercia de
lineas:
Asi la integral
tid"
= s , es la longitud de arco del anilIo.
ü
-1
SS
xl [t" * qu' lor - qa [,,at - ]'JoJOJO¿
1 f'2. 1 i-rqJo"o.-rqJoY
Sinplificando:
sss
¡rtr 1 ,l 1 l.x, rocs +
iw' "ods - ;o 'o{*
qu' fa, *
'o
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-110-320.jpg)






![Apuntes y problemas de Estructuras Hiperestáticas
De Ia comparación
siguiente:
En e1 segundo caso Ag = Q ,
: 0.28 mm
E jemplo.' Una viga
carga de
resorte de rigidez k:
entre ambos casos establecemos 1o
- Cuando e1 apoyo B es indaformab1e, J.a reacción
en é1 es mayor.
- S1 momento negativo en A es lra,yor cuando B
: se desplaza verticalmente
- EI. momento positiVo,eni e1. tra.Eo r"r 1r"yo= .cuando
eI ,apoyo B .no -se 'desplaza,
-.. 81.-punto de momento: máximo positivo .está más alejado
deJ- apoyo A cuando el- apoyo se desplaza.
en er primer caso ¿a=I1 =o.ooo28 m
5UUU
de madera de 30 x
5 T/m, en e] punto B
5000 T,zm. Determinar
60 cm soporta una
se apoya sobre un
las reacciones.
5 T/m
Escogiendo como redundante la fuerza en ef resorte (apoyo
e1ástico)
5 T/m
o^Lt-
B
6.0 m
Ay=25-0.4X2 Cy=25-0.6X2
Tramo AB:
2
4.0 m
2
1U x +
AM
axz
3
M = ?q. w - ñ ¿ . V^ . v
:til
M.(:r¡ = 0.16.X2 x'axz'
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-117-320.jpg)

![Apuntes y problemas de Estructuras H¡perestáticas
CAP 6 METODO DE I,A PENDIENTE - DESVTACION
6.1 INTRODUCCTON
Este método fue originar-mente presentado en er.año 1.915 por
er profesor G. A, Maney y es conocido también con el- nombre
de Método de 3-a .Defozmación..Angu],ar; su aplicación está
destinada a la obtención de
"oii.itu
ciones internas en
estructuras indeterminadas, ya sean estas vigas continuas o
pórti-cos formados por barras rectilíneas.
E] aná1isis de estas estructuras se enfoca considerando como
incógnitas 1as rotaciones angulares de ros nudos y sus
desplazamientos transversales; con estas magnitudes pueden
ser determinado,s 1os momentos flectores en cada cabeza de
barra.
Antes de obtener 1as ecuaciones fundamentares que rigen elmétodo, centraremos nuestra atención en .a.oad*. argunos
procedimientos de cá1curo para det.erminar fas rotaciones
angulares y desplazamientos transversales de 10s extremos de
barras rectilíneas prismáticas (sección constante) .
conocemos l-a existencia de varios procesos para efectuar este
trabajo, sin embargo escog:eremos aquel que resulte sencillo y
práctico en su aplicación; entonces de todos efl-os
utilizaremos ef Método de fa viga conjugada por su facir-idad
de r,ranejo. E1 método escogido utiliza fos diagramas de
momentos reales como cargas elásticas reducidas sobie Ia viga
conjugada;1a fuerza cortante en argún punto de esta vi_ga
corresponde a -r-a deformación angular en er- mismo punto de laviga real y 1os momentos flectores a los desjlazamientos
transversales respectivamente.
En consecuencia utirlzaremos r-as bases de] métocio para
cafcular ef momento que se origina en ef extremo ,,j,, y farotación angular def extremo *i,r cuando se aplica un momento
t'tij en el extremo "i" de una barra articulada - em,orradarIi- j , de Iongitud ,'L,r y sección const.ante. (f iq. 1)
r.----------.--'-_---L
i
lng. N. González V. @ 2007
(fis.1)](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-119-320.jpg)
![Apuntes y problemas de Estrucluras Hiperestáticas
Las condiciones de apoyo muestran que:
- En eI extremo "j', Ia rotación angular
-'Los desplazamientos transversales son
Por consiguiente, .Ia viga conjugada y
correspondientes a este,caso se muestran
+-_-.-_ L _._-_____¡
Por IMi : A1¡ = 0;
cie donde:
Aplicancio ta ecuación ae
(fis .2)
1r-.rUt 1r--1r.
2 'Et'3 2
equilibrio IFy = 6,
,H,-i r r$r
es nula (0j :
nulos lAij
1ás cargas
en l-a fíq.2
0)
Aii = 0).
e1ásticas
M¡j
EI
lEr.?u = o
El ' 3
(6.1)
obtenemos:
1
0i =:.12
clespe j ando 0i :
Reemplazando (L) en
lv1;¡ -M;;
0i =
-r---l- ¡
2.El
(2) obtenemos:
O¡=
MÜ
.L
q .trt
Iit;; = -a-E] g
1L
(6 .2)
(6.3)
(6. 4)
o tanüién:](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-120-320.jpg)
![f
Apuntes y problemas de Estructuras Hiperestátic€s
La expresión (1) permite calcular el momento en e1 extremo
It j It cuando se apl j-ca un momento Mij en e1 extremo trirr ! ]a
expresión (3) determina 1a rotación angular deI extremo rri,,
en funcj-ón del momento aplicado y 1a expresión l4) permite
calcular el momento que r se origina cuando eI extremo i sufre
una rotación angular 0i dada.
No debe. perderse de vista 7a adopción de
signos p.ara .Ios momentos y rotacíones
angwTares, En nugstro . aná-Lisis adopt.amos que
todo sentído de rotacíón horaria es positivo.
E1 anál-isis anterior puede
inverso mostrado en Ia fig
extremo "i" es Mii.
I.r-
aplicarse análogamente af problema
.3, donde e1 momento aplicado en el-
¡lij
0r=o
(fiq.3)
Ai=A;:0
i"lij 2 M¡i
jct
.. aLt ^
lvlii =
-.ui
Lr
(6.s)
(6.6)
t6.7)
Cuando ]os extremos de .la barra son perfectamente empotrados
y se origina un clesplazamiento transversal del extremo j cuya
magnitucl es A (fig.4), en anüos extremos se originan momentos
flectores reactivos, eJ-1os pueden determinarse a trawés del
método de la viga conjugada de la sigul-ente manera:
a. -
M¡l L
")- 4a
Ing. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-121-320.jpg)
![.,...'.;.-'.-,...',,..:.,.:.'.,j]jiJ:'.;.].'
:;"c. ¡ri¡!".;"a ;e !&&r-'t.*1<4di:+.¿
-i-."-*-4 ---_--l -
I Apuntes y problema§ de Eslructuras Hiperestát¡cás
tvt¡(ffii .:.:..:.
.l:.
.:::::::
::::::{l)
M¡¡
L _-{_
0i:o 0:=o
I*,
1^ Er
(fis.a)
Por »Fy = 0:
de donde:
Por >Mj =
^i
de donde:
r.tHr-} .,Tfro
r,rii = Mii =
Y^
o.l, ,Pr, ,3r L-i L rSr I L=o
l'',,,-$-tl'l
(6.8)
(5. s)
La expresión (B) m.uestra que fos momentos. originaCos ¡ror un
descenso de apoyo, son igrrales en valo¡ y signo. f.a e¡presión(9) perrnite calcul-ar el valor numérico cie dichos momentos en
función de ]as caracteristicas geométricas y mecánicas de rabar::a y de la magnitud del desplazamiento de] extrerno ,,j,,. El
signo (-) de fa ecuación (9) indica que el sentido real de
]os momentos reactivos en.r-os extremos de ra barra i-j es
contra¡io aI asumido.
si es e-L apoyo t'irr e1 que sufre un descenso de rnagnitud a,
ios momentos reactivos en los extremc.s serán tfitr. Sl r poE
aralogÍa:
^I a--
M;;
(6.10)](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-122-320.jpg)




![Apuntes y problemas de EstructuÍas Hiperestáticas
M¡Ü
ESTADO O
(fig.sa)
ESTADO 2
(fis.ec)
) rur';, +
ESTADO 1
(fis.sb)
" " -. -'-'-.-lz rtr)
ESTADO 3
(fis.ed)
o¡ aü I J
FI---i' 1_. _:,_. _._ _ i
"-"- --.
', i ¿il.. i
:Ar I
o¡ J rMj
ESTADO REAL
(fig.e)
c lt
M-¡tI i
i
AU
]"M"j¡
Los momentos en los extremos de la barra para su posición
final (fig.9) , pueclen ser determinados superponiendo fos
momentos en esos extremos pera l-os diferentes estados de
deformación angular y desplazamiento mostrados en .l-as figs.
9.a - 9.d.; de esta manera podemos escribir:
Mij =Mou+M1¡j +Mz¡j +M3¡j
M1¡ =Mo¡i +M1ji +M2tt +M3ji
donde:
lng. N. González V. @ 2007
(6.1r-)](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-127-320.jpg)
![Apuntes y problemas de Estructuras Hiperestát¡cas
Mo¡ y Mo¡¡= son los momentos de empotramiento
perfecto para una barra empotrada en sus
dos extremos. Estos momentos se originan
por acción de ]as cargas externas sobre
Ia barra considerada (i-j).
Los otros términos que lintervj-enen en lal ecuaciones (10),
han sido determinados en e1 aná1isis efectuado en el primer
punto de este anáIisis, sin enrbargo a rtrnnera. d.e recuerdo
podemos nuevamente incorporarlos en este resumerr:
. AtrI
M'¡¡ = -::-. g' ru1;i=f .e¡
son 1os momentos en los ext.remos de ]a barra debi-dos a fa
rotación angular de la tangente trazada a l-a elástica en ef
extremo "i".
son los momentos en f os extremos cle 1a barra debi.d.os a
rotación angular de 1a tangente trazaCa a Ia el-ástica en
extremo "j ".
¡¡2ü = .ej rvr2¡i=f.ei
,,3. 6El
¡vr r.l =- - .a¡i
c 6tr1r rJ..
¡vl lt =--.-.Aii
L'
n¡=fl o,*? n¡*E a¡¡rMo¡
2El
L
1a
e1
son fgs monentos en los extremos de la barra debidos a1
desplazarniento transversaf del extre¡no "j".
Sustituyencio estas expresiones en l-as ecuaciones 10:
Ing. N. González V. @ 2007
,,'=?3 o,.-? r¡*E a¡tMo¡i](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-128-320.jpg)

![Apuntes y problemas de Estructuras Hiperesláticas
como 0i = 1, de donde se obtiene:
(6.14)
El factor Kii recibe propiamente el nombre de rigidez absoluta
de1 extremo tri't para la barra i-j. La relación entre Ia
inercia de Ia barra y su longitud, se denomina factor de
rj.gidez (kij):
[*rll-l
(6.1s)
cuancio una barra es prismática (sección constante) en toda su
longitud, tal eI caso de 1as barras estudiadas hasta atrora,
ia r:igidez es igual en ambos exlremos.
6.5 MOMENTOS DE EMPOTRAMIENTO PERFECTO
Se denominan momentos cle enpotranienLo perfecto (momentos
fijos) a l-os momentos fiectores que se presentan en los
extremos de la barra i-j, cuanclo ambos extremos se hallan
peri-ectarne.nte er.potrados en sus apcyos o cuando uno de f os
e.a:treÍnos se encuentra einpotrado y e1 0tro simp]-enente
apoyaclo, y 1a barra se encuentra sometida a cargas ev'ternas
según su eje longitudir.ral.
Las iablas No. 1 y No. 2 permiten determinar diChos r¡.or,entos
para varios tipos cle carga usuales'
lñ9. N. Gon¿ález V. (a 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-130-320.jpg)
![I
i
I
Apuntes y problemas de Estructuras Hiperestáticas
ltrtOlrIENTOS DE EMPOTRAMIENTO PERIEGTO
vtr:(Hvi,
ij
+--L__---i
CARGA Mij Mji
J
t- á+ b -------+
Pab2
-----6-
t!
Pa2b_T
P
J PL
- -:-B
PL
I
q
@
L-
_
qL2
t¿
qL2
12
q
L-
_qú
30
qL2
20
-L
'
_
qL2
a^
qL2
2n
q
i,IIlrITr}._
i- a ----+-
Q'2t6-'iB-3")r
12. L L'
Q'3 (4-3')
12L' L
q
-¡-tlx
-.rflI++J.ttr-rv-*
+-- ¡12
-¡
* 5qL2
9f)
5qL2
96
,
",
ir, 11 lllll]l]lh o
"
^aa?
frti" - 2ta' + au ¡
#nt - zLa2 +a3¡
M1
--?-+-a-,-4- b-------+
-ft,-ufr frz-sir
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-131-320.jpg)

![Apuntes y problemas de Estructuras H¡perestál¡cas
6.6 APLICACI,ON A VIGAS CONTIÑUAS
Ejemplo. Analizar Ia viga de inercia constante.
4.8r tÁ
+- 4.5 -----,,--- --- 2.0 --+- 3.0 + 4.5 __f
1234
- Momentos fijos: Utilizando Ia tabla No.1:
o.,oqn2
[,7'!1-2 = --]_--1 = - 6.75 T m
12
¿..t¿.c¡r2
M2-1 = t"""' -6.75 Tm
12
8 (2.30)2
IVZ-¡- =-5.76 Tm
5¿
^ ,^ ^^'2ó.(z.uu)
M¡ z -:=-,=3.B4 Tm
c
^
o r^ rn2
M1-,,1 =-a'u
la'JU/
=-4.86 Tm
20
4 B.(4.50)2
Má ?= -3.24Tm30
Planteamiento de ecuaciones:
Las ecs. ( L3) apLi cacias a los tres Lramos c: Ia v-ga ar rojan
fas relaciones slguientes:
art¿Lt,^^
Ml-Z = *(Z)t+02-391 Z)- 6.75
+.J
tl:I
Mz-l = #QOZ+ 01 - 3p1-2)+ 6.75
4.C
f42-g - T eur+ 03 - 3p2-3)- 5.76
5
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-133-320.jpg)


![Apuntes y problemas de Estructuras Hiper€stát¡cas
Ejemplo: Determinar 1os momentos para Ia viga de inercia
constante.
J
I
II
{
q
Iq
q
{
fq
t
q
10r 10r
AIll!,."
2.O . 2.0 2.4
6T 6T
3.0 3.0 3.0 3.0
4
Condiciones de borde rotacional: Los a.- i y r ;__-
empotrados y no pueden rotar, en Lv.-'ecug¡.---. 91 = A::0
Condiciones de borde traslacional: ¡io e:.:isti.endo
desplazamiento transversa] (descenso) de .l-os apoyos, sus
desplazamientos son nulos, qt-Z : QZ-¡ : g:-s : 0
Ecuaciones por tramo:
Mr-z =f rtrl-u.oo
N,t2-1=f trnr)*u.oo
Mz-s =
fffrrr+03)-7.50
l',4¡-z =
f tzos + 02) + 7.50
rvts-+ =
f trt.t-r.uo
M+-¡ =f to.lnr.uo
Equilibrio de nudos:
Nudo
Nudo
EI eguilibrio rotacional cle los
nudos 2 y 3 arroja las siguientes
ecuaciones:
1.5_-n
EI
=0
0; 402+03
0; 02 + 4
a.
3:
M2-1 + FI2-3
I'13-2 + I,13-4
lng. N. González V. @ 2007
-03](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-136-320.jpg)

![.-'
Apuntes y problemas de Estructuras Hiperestát¡cas
Ejernplo: Determinar los momentos
constante,
para 1a viga de inercia
PR ,,rK t oie 12K
Condiciones de borde rotacional.: Los apoyos
empotrados y no pueden rotar, en consecuenci.a: 01
Condiciones de borde traslaci.ona]-: No
desplazamiento transversal (descenso) de 1os
desplazamientos son nu1os, et_z: gz_z = g¡_q = 0
Ecuaciones por tremo:
10.010.010.010.0
1y4son
=0q:o
existiendo
apoyos, sus
tu11-2 =
ffitnrl-.r.oo
Mz-r =
fl{rrr)*.o.oo
Mz-s =
f,eer+03)-4o.oo
f,43-2 =
f eer+02)+4o.oo
ru3-4 =
ffitrn.l-.o oo
M¿-¡ =ffitr.t+3o.oo
Equilibrio de nudcs: E1 equiribrio rotacionar de fos nudos
y 3 arroja 1as siguientes ecuaciones, asu¡niendc qu. ?E1=1,
Nudo
Nudo
02
02
,.
3:
142-1 + tr12-3=¡ , A
!13-2 + M:-q:0 ;
+ 03 - 10 = 0
+ 4 03 + 10 : 0
lng. N. González V @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-138-320.jpg)
![Apuntes y problemas de Estructuras H¡perestáticas
So].uciones:
Momentos finales:
-26.67
Ejemplo:
Q2 : 3.3333
0: = -3.3333
Mt-z : -26.61 "rm
Mz-t = 36.67 Tm
Mz-: : -36'67 Tm
M:-z : 36.67 Tm
M:-s : -36.67 Tm
FIa-3 : 26.61 Tm
-Jb b/ -36.67
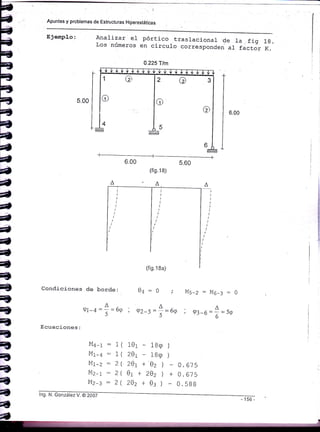
Anafizar el pórtico intrasfacional,.
9T
6T/m +--2-l
I
5.0
I
2 l=4e.ooo cm¿
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-139-320.jpg)
![Apuntes y problemas de Eslructuras Hiperestáticas
Inercias rel_ativas:
, 48000
b_a___4r 2000
. 12000
l1-5=-=--=1
I 2000'
relativas: multiplicando por !.,. io= val.._
L
absol-uta
2E(3t) 3Et ^ 1trt21) 4Et
425:
, 36000
lt_, =
-.
= ?
12000
6_+=ffi=z ;
Rigideces
de rigidez
Barra 1-2:
Barrá 2-3:
2E(4r) _ 4Er _ 8
633
'Condiciones Ce borde rotacional: Como
empotrados, no sufren rotación, entonces: 01
Condiciones de borcie traslacional_: Los
asentamientos, entonces J-os desplazanientos
implica que: e1-2 = gz-z = g2_4: e:_s : 0
Ecuaciones por tramo:
l41-2 = 3(02)-8.00
it4Z-t = 3(202)+8.00
R
lvlz-s =
iQcz+03)-s.00
R
Iv13-2 =
i(z0s
+ 02) + 4.00
llr2-4 = 1,6(20a)
N14-2 =1.6(03)
Ms-s = 1(20¡)
[45-3 =
'l(63¡
]os apoyos son
:0a:0s--o
apoyos no sufren
son nulos y ello
Ing. N. Goflzález V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-140-320.jpg)

![4.1'.
,:,:ri¡t:i.:ajr.1i}ii¡r]::.:' r .,'
:''
Apuntes y problemas de Eslructuras H¡perestáticas
Ejemplo: Analizar e1 pórtico
. 60k
intraslacional.
v
60"
40.0 , __=_r__ 30.0. _______r_
00.
Condiciones de borde rotacional:
0r:0a:0":0r:o
+_ 30.0,
Rigideces relativas:
Condiciones de borde
4El
Asumiendo oue '-
- 1-30
traslaciona]-:
enronces E1:o,rs
20
,Í:
'i,
ri
'ii
t'
til
;l:
ili
.il
'll
'1,
l'
,1i
iii
':t
'11
I,
:l
qr-2 = Qz-t : Qz-t' : Q:-s : 0
Ecuaciones por tramo:
_ 4Et,
Ma-b=
f (en)= 0n
AtrI
Mb-.=
ñ (rOs)=2 06
l¡lb-e= 2e 06) = 1.5 05
20'
_ zEt,
Me-b=
-
( On)=0.75 0u
4Et.^
lv'lb_.=
*
(, 0b+ 0c) -225= 1.5 0¡ + 0.75 0c -225
r¡ _ 4E1,,
Mb-c=
*
( eo+20c) -225= 0.75 0b + 1.5 0c - 225
{
{
q
q
I
I
il
I
I
I
I
T
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-142-320.jpg)

![Apuntes y problemas de Estructuras Hiperestáticas
6.7 TRATAMIENÍO DE APOYOS ARTICUI.ADOS
La condición de borde para un apoyo articulado consiste
";utilizar su capacidad nula de absorción de momentos, erropermite plantear una nueva ecuación, pues si bien eI momento
flector en un apoyo articulado es nu1o, Ia rotación angul-ar
de dicho nudo no €s.c€ro.: para este anárisis las ecuaciones
de1 método pendiente desviación se pueden uprl.u. si-n ni.nguna
modificación, tomando ren cuenta que e1 desplazamiento
transversal en n:-rio. sin embargo también pueden
transformarse de Ia siguiente ma;-rere:
rrl1¡ =
f 1ze¡+ 0j)t Moü
u¡i=
f {ei+ 2oj)t Moj¡
Como apoyo "j "
nulo, con esta
Despejando 0i:
es articul-ado, el momento flector en éI se
condición:
Mji =
tl (o¡ + 2*,0;)tMoi¡ = o
O,=-]0; + L
^'o"")- ,-r -ru, rv'Jl
Sustituyendo este val-or en ¡,li j :
r',r¡ =
f tz oi - 1o¡ t liuo;i) lr,roij
Transformando l-a expresión, finalmente obtenemos:
rut¡j =
f (o¡)rMo¡i t -l voj¡
En efla reconocemos que er factor de rigidez se modifica aI
vafor 3EI/L, y además que el momento de emoctramiento
perfecto también se modifica, considerando un- tipo cie barra
articulada-empotrada (Tabla 2). La aplicación de. esta última
expresión Ia realizaremos en e1 siguiente ejemplo.
lng. N. Gon¿ález V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-144-320.jpg)




![Apuntes y problemas de Estructuras Hipetestáticas
Momentos fina].es:
6.8 TRATAMIENTO DE VOIiADIZOS
Un voladizo es una estructura estáticamente determinada, en
consecuencia . siempre se pueden deternr.i-nar las fuerzas
normales, cortantes y momentos flectores en el extrcemo
empotrado. Cuando se aplican las condiciones de equilibrio
rotacional de nudos, debe considerarse e1 momento reactivo en
eI extremo empotrado.
Ejemplo: Determlnar los momentos en los nudos Ce la viga.
20l
i
4l
5.0 -_--+- 5.0+-
1
3l
12.0
va/z
2
I
2.0 ---t-
Considerando 01 : 0 y multipficando Ias rigideces por (
H
, ¿Lót ¡ _.(22 =_=_t]l =5
122
25
.E
):
*',,r=ZEol=1rr=s
10 5
Ecuaciones por tramos:
t41-2 = B(20r + 0z)
Mz-t=B(01+202)
-25= B0:-
+25-160¡+
lng. N, González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-149-320.jpg)





![Apuntes y problemas de Estructuras H¡p€restáticas
h
hr
ts?.
Fá
b
b
H
ta
bbF.
h.
bb
ho
b
b
ho
ho
bá
Ir
1f,
á
=l
=ü
É
=o
EÜ
-ü
-ü
Tramo 2-3: Me_¡=Ms_Z=
Tramo
Eeuaciones:
6 .(1 00000) . (45000)
6oo2
-135000 kp cm
Mz-3=Ms-z=-1.3srm
3-4: Mg-¿ = M¿-3 =
6 (1000!01:(45000)
= 1ss000 kp cm
6oo¿
Mg-¿ = M¿-s = 1.3s r m
Denominando ¡ ::El= 1
L
Ivlr -o= A. - o
Mz-t=202+B
Mz-r202+03-]..S-1.3s
Mt-z-02+203+7.5_1.35
M=-q: 2 0: - ?.5 + 1.35
!Ia-3: g, + 7.5 + 1.35
Eguilibrio de nudos: pr-anteando er- eguilibrio rotacional de1os nudos 2 y 3 (q,re son los,:.,:..o" que pueden rotar) através de l-a suma de momentos de toáas
.Ias
La..as queconcurren en e11os, obtenemos:
I'12-1 +Mz-::0;402 *0:-O.eS=0
I 02:0.2261
l.
i"I3-2 + M:-s : o; 02 + 4 0: = o ] ,, = _o.os67
Momentos finales: Reemplazando las sol-uciones 6n r - _
expresiones para cada barra:
vv4qurvrrcr srr ads
-7.77 8.45 -8.45 6.26 _6.26 8.79
,ta ,
".
, y
-7.77
lng. N. conzález V O ZOOZ](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-155-320.jpg)

![i
IApuntes y problemas de Estructuras Hiperestáticas
ñl
il
7'
=ü
='a
a
a
='
=r¡o
aúü
*
a
áa
I
ñ
ia
fr
a,
1,
rt
¡o
=ü
=e
¡t
a¡a
a
a
afü
vü
4ü
0:=04
Factores K:
Ecuaciones:
M:-:- :
Ir1-J -
Mt-z :
Mz-r:
l4Z- q =
.,9-J
Eguilibrio de
.A
= Ui 9:-t:-:54
Multiplicando los
A
Qa-z= - :4 95
reales por 10/EI
q;
valores
zEI EI
42
K1
'
:q9u :2Et= 20
.. 2E(2t) 4Et
xq-z:-;-:s=6
s ( 0t -1s<p )
s( 2 01 - 1sq )
20( 2 01 + }iz )-6
20( 0t + 2 02 )+6
8( 2 02 - 72 e I
B( 0z - t2 q )
nudos:
= 501-75
:1001-75
: 4001+20
= 20 01+40
: 1602-96
: BA2-96
I
a
oz-6
02+6
a
q
NI1-3 + Mr-z = 0; 50 01 + 20 02 - ?5 e - 6:0 (a)
M2-1 + I"f2-4 = g- 20 01 + 56 02 - 96 g + 6:0 (b)
El sistema forrnado presenta tres incógnitasr por e]1o es
necesario prantear una ecuación adi-cional, e,lra surqe ciei
equilibrio de cortantes:
Ml-¡
H4
(fig.17.b)
Por equilibrio horizontal del pórtico:
1
H3](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-157-320.jpg)


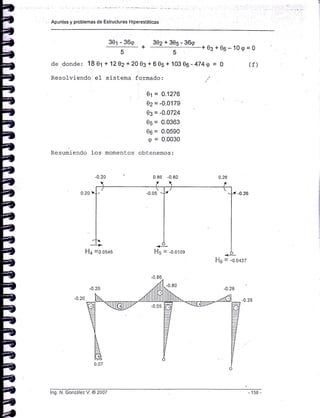


![Cóndiciones de'¡árae:
og=o
Ml-Z= Mg-3=0 ; M6-1Or=-0.36 ; M3-1.1 :-0.'12
Condiciones de desplazamiento <leJ. primer piso:
,^. ^ : -a1
a] ,n- ^ : -419t-s=-; ; vz-t =-; , q3-8:-?
denominando: 4l : rs<pr
4
entcnces: q1-9 : -159r , QZ-'t = -L2(pL , 9:-8 = -10q1
Condiciones de desplazamiento deI seg,undo piso:
At L2 L2
gr_,r=-t' ; ez_s=--: ; 9:-03 3 '- - 3
Haciendo, 9: qz
3 '-
entonces: Qr-a : -qz i ¿z-t : -QZ ; 9:-e : -92
Ecuaciones:
t"l9-1 :01 - 45 <p1 ; Nlt-g = Z0r - 45 tPr
N7-2 = Afi + 202.- 12 qt ; N12-1 = 401 + 202 - 72 q7
l"ls-3:40s + 203 - 60 «pr ; II3-3:204 + a03 - 60 Q1
Nlr-z : 801 + 402 - 3.456 ; M2-t : 40r + 802 + 3.456
t42-3': 802 + 403' 1.314 ; ['13-2 : 402 + 803 + 4.374
111-4=201 +04-3<pz ; t'1,i-1 =0r+20a-3<p2
I'12-5 = 202 + 05 - 3 <pz ; i'15-2 : 0z + 205 - 3 <p2
M:-o : 403 + 206 - 6 9z ; Mo-: = 20t + 406 - 6 <p2
Mq-s : 60a + 305 - t.128 ; M5-q = 30s + 605 + 1.728
N15-6 = 605 + 306 - 2.81 ; M6-s = 30s + 605 + 2.1E7
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-166-320.jpg)







![Apuntes y problemas de Esfucturas Hiperestáticás
00.40oooo
000.4Oooo
2.4000.4000
6.80000.400
0 7.2 3 o 0 0.2 o
03122.4000.2
0 0 2.4 10.8 2.4 0 o
0.4002.45.600
000006.43
000.200311.2
0000.2002.4
2.25000000
1111100
0111011
/.o J
3 12.4
o 2.4
00
0.4 0
0 0.4
00
00
00.
00
00
tt
11
00
l
I
;
l
]
I
I
I
a
t
l
I
l
l
)
,
I
l
l
I
l
I
,
t-
I
a
a
l
t
t
t
I
I
t
Equilibrio de cortantes por pisos:
H12+H13+H14+H15+17 = Q
H1+H2+H3+Ha+10=0
H5+H6+Ht+3:0
E.l- sistema que se forma es:
0
2.4
1 1.6
2.4
0
0
0.4
0
0
0
0
2.25
1
0
0 -4.8 _1.2 o
0 -4.8 -1.2 o
0 -10.8 _1.2 o
0 -10.8 _1.2 o
0 0 -1.2 -0.6
0 0 -1.2 _06
0.2 0 -1.2 -0.6
00-1.20
000_0.6
2.4 0 o -0.6
5.2 0 0 _0.6
0-7000
00-80
100_6
ó
10
0
-18
8
10
0
-18
I
10
-18
-85
-33_33
-17.50
La solución del sistema de ecuaciones arroja 10s siguieiltesresultados:
0l = 2.78720
02 : 0. 93862
03 : 1.50133
0a = -0.09711
05 : 7.73115
06 : 0. 75605
0z : I .76211
0a : -2. 66533
0e : 0.'r.0329
0ro= 1.70546
0rr= -3. 91551
tPr = 1.30416
q2= 1.85614
(p3 = 3.21 491
lng. N. González V. @ 2007
-172-](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-175-320.jpg)
![Apuntes y problemas de Estructuras Hiperestáticas
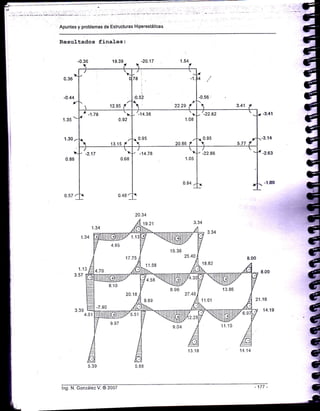
Resultados fina]-es:
1.34 20.34
il
H
I
it
E
l
I
I
3.34
I
, -1.34
-1.13 B
_ 17.75 7t
t'-l.ls
i
f -3.C4
': ')t
, f
4.70
_4.58
. -3.39 ts
,^ ro I
¡'-l l.ss -1s.s2
_4.30
, -4.78
cz"oaF
;t'".-
-f
t'4.17
I
-s.gs '*' _r1.0)
-12.28 I
-t 3.1 I
to.Jb
17.75
1 1.58
8.96
¿v. tó
o ao
tJ.ó5
27.4A
11.01](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-176-320.jpg)



![Apuntes y problemas de Estructuras Hiperestát¡cas
t_
I
ü
t
a
a
a
a
a
a
t
il
ü
?
iD
e
a
a
ü
e
a
a
a
a
a
a
a
=ti)
=t
=,e
q
<,
{t
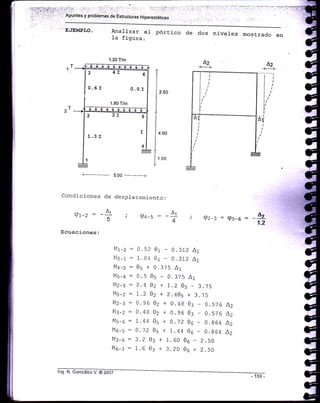
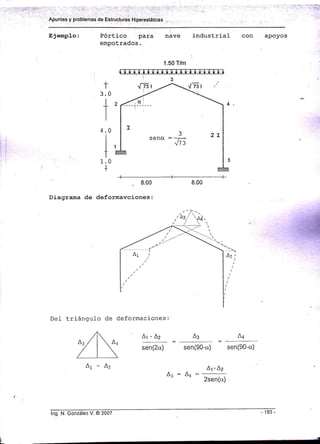
Ejemplo:
Ios pisos.
Analizaremos la
despreciando l-os
misma estructura anterior,
desplazamientos laterales de-
6 T/m
6 T/m
96
o.35 I
6 T/m
10 7.2 11
;
0.35 1r i. 0.35 I
!:
6 T/m
1
56
o80 l
6 T/m
" 7.2
0.80 I 0_8 I
6 T/m
7
7.2
6 T/m
8
0-80 I
b
1.20 I
12
1.20 I
13
7_2
1.20 I 1.20 I
14
3.50
4.00
4.00
2.00
4.00 6.00
En este caso ]os ángulos de rotación cle las cuercias
son Qt : Qz = Q3 = 0, con ello eI sist.ena de ecuaciones se
reduce al rango 11 x 11, eliminándose Las tres úiltimas filas y
Ias tres últir¡,as colunnas de fa matri-z cie coeficientes del
problema anterior. Con esas conciiciones las soluciones del
sistema son:
01
03
05
0z
0e
oll
Q2
= 0.800928 ,
= 0.404439 ;
= 0.876752 i
= 0.709905 ;
= 0.433618 ;
= -4.265688 ;
= 0.0000 ;
0z = 0.520622
0a = -2.593727
06 = 0.426757
0B = -3.333265
010 = 1.3663
91 = 0.0000
a3 = 0.0000
lng. N, Gonzále¿ V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-181-320.jpg)
![-,--f::l¡rfr!" ,-... '
' -:'' )
'. .,.' ,'"1 eórni"! y problemas de Estructuias Hiperestát¡cas
0.44
1.O2
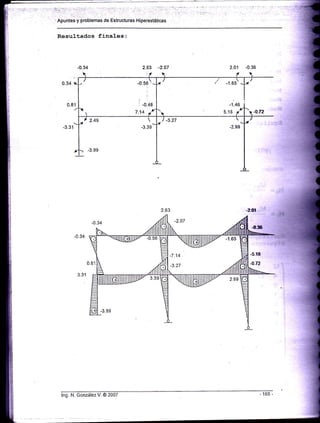
Resultados fina].es:
f i3
-3-41
-3.11
aoa
20.1 8
9.89
iTr onzález V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-182-320.jpg)
![il
a
a
fl
*
-
á
-t
-l
=t¡t
=r
a
a-t
a
a
a
a
a
a
ñ
a
a
á
a
á
=,
=,
=t
=,
=t4'
€
ri
Apuntes y problemas de Estrucluras Hiperestáticas
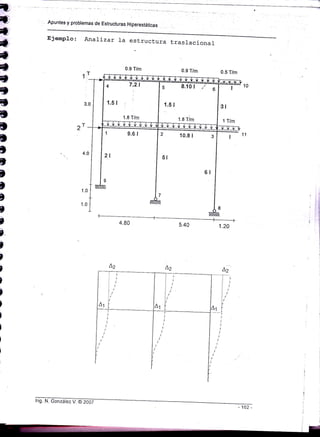
6.11 APLICACION A PóRTICOS ?RASLACTO¡¡ALES
=RREG{,I.ARES
se consideran pórticos traslacionares irregurares a aque]1osque en su geometria presentan dos o más gruáo" de libertad enfunción de Ia unión de vigas a corumnas u otras formasgeométricas como barras inclinadas. Estos casos se
-presentan
en naves industriales, estructuras con mezzanine, etc.
El análisj-s parte.
-
de la hipótesis asumida sobre laindeformabilidad axial de las barras componentes, además deconsiderarse que
-
los desplazamientos
"".i., medidostraüsversalmente a 1os ejes de ios elementos.
Ejemplo: Pórtico con mezzanine.
2.0
5.0
Diagrama de
6.00
desplazamj-entos :
5.40
1.5 T/m
¿ález V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-183-320.jpg)
![Rigideces relativas y ángulos de desplazamientor ,
kr-s=f =0.+rr ; k1-2='4u'' =0r,, kz-o=2E521=0BEr
kc a=?El=rr; ks-+={f=ar,, k1:7='=trut =.,2.
A1 ^ :41 . A2 _. Ai+L2
e1_5 = -5; a2_6 = -? , eZ. .: - ' : qa_7 =
Sabiendo que 05 : 06 : 0r = O
Mr-s = o.a(20¡ -, ?l = 0.801 - 0,24L1
Ms-r = o.+1e1 -:4--!-¡ = 0.401 -0.24L1
Mr-z = a(201 +02)-6 = 80r +402 -6
Mz-t = 4(01 +202)+6 = 401 +802 +6
Mz-o = 0.8(2;2 -:91 = t.602- 0.48a1
)
Me
-z =0.8(02 - ¡ 9l = o.8o¡ -0.48a¡
)
Mz-: = l(202 + 03 -, ?l = 202 + 0: - 1.5a2
M:-z = I(0r + 203 -3 4-¿) = 0z + 20¡ - 1.5a2
'5
Iv13-4 = 3(203 +04)-3.645 = 603 +30.1 -3.645
M+-¡ = 3(03 +204)+3.645 = 30¡ + 604 + 3.645
M+-z = r(204 -3
";-,
= ze4 - r¡ o, -
;
o,
Mu
-+ = r(oa -3 Ofr, = o.¡ - ], ot-1 o,
Ecrraciones:
Eguilibrio de nudos:
- Mt-S + M1-2 = Q-
8.801 + 402 - 0.24A1 - 6 = O (1)
lng. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-184-320.jpg)


![l
Apuñtes y problemas de Estructuras Hiperestáticas
(3)
]_
Ha
>
I
I
il
I
l.
t
a
a
a
a
il
il
il
I
il
t
l}
t
I
t
t
t
ü
o
t
a
a
?
i,
a
ü
a
t
e
e
e
a
a
Equilibrio de nudos:
Mz-r +Mz-:: 0 ; 1002 + 4 0¡ - 0.5^- 16: 0
M3-2 + M:-¿'= 0 ; 4 02 + 12 03 - 2.0 L+ 16 = O
Equilibrio de cortantes:
(1)
(2)
H1+Ha
Mr-z + Mz-r
6
02+403-34
M+-s + Mg-¿
3
:0
Resolviendo ef sistema:
02 : 2.57239
0z : -2.6115?
q : -2.64463
-5.16
0.07
Ing. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-187-320.jpg)






![l.=.,.,{
, . .:,{
I
e
C
C
-C
c"(
a,
t!
t
T
It
t
a
^; 93-4=L =e
F
¡l
.¡¡.1
¡
I
I
il
I
i
il
.1
i
i
:'
t,
i
Ejemplo:
A
91-2=-;=-Q
Ecuaciones:
Mr-z :
M,,:
Ii{3-4 =
Equilibrio de
l'lz - r
M,.
2EI
-
le1
1t, I
-
(20.¡
n
/t,I
- (30¡
L_
nudos:
Mz-::
lt, I
(20r - 3o)
L
lt, I
= h @2+2fu)
2ET
=
L
(e¡+3q)
3p)
+ o:)
+ 3p)
Mz-l
N{:-z
M¿-l
Ec¡:ilibrlo cortantes:
1x,
ztf.|ro2+fo3-ir=o
] o, * ztl * ,l-le¡ * 1q, = o
lr-'LL
X1+X2+P=0
.. _ rr41-2 _ Ivr2-1 ,*tro, _ o+)"'- r- -i,
Xr = Ir'l+-:-M¡-+
={1103-04,¡,?.*--L=L."
0;
0;
(1)
(2
<ie
P
I
Í
I
a
a
a
a
e
I
e
I
a
f
f
ú
C
TL
lng. 1.,1. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-194-320.jpg)

![Apuntes y problemas de Estructuras Hiperestáticas
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
t
)
)
I
I
I
I
)
]
I
)
]
t
]
senü, =
t;;
a¡=a¿=1/1161-42)J
ffidonde:
Rlgideces Y ánguJ-os de desplazamiento lateral:
/
2EI EI
fi_.>=-=-=)AAiL
- 2E"lTt 2Et
f. ^= --=L0'z-) lt¡ I
/J
r. ^ -2É.-Ft =E=ro'J-+ t-^
VlJ I
. 2E2l 4El
I¿-5=---=-- =ó
1
e.-) =- 4r = -0.75a¡A
a
a?-? = * = o.s(o, -Az) = o 5a1-o'542
"173
3Ar
(p3-4 = - :* =-0.5(a1 -AZ) = -0.54¡ +0.542
tt I-1
.ot .=-'o'=-o.6oazaa-r
5 "
a -o^ n
Ecuacl-ones: -ott vL - w¿
r.f,-¡ : 5(20r + 0., - 0.7541)
Mo,-5(0r+20)-O.75At)
NIz-: : 2OQe2 + 03 + O'5A1 - 0'5Az) - B
Mt-z = 20(02 + 203 + 0'5Ar - 0'542) + B
!i3-4 = ZO(20s + 0q * 0'5A1 + 0'5Az) - B
Ntq-3 = 20(03 + 20a - 0.541 + 0'5Az) + B
Niq-s: B(20a + 0s - 0'6Az)
t'ls-q - B(0q + 20s - O'6Az)
iiilN. González v. @ 2oo7](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-197-320.jpg)

![Apuntes y problemas de Estructuras Hiperestáticas
de
I
I
I
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
)
]
I
EMk : 0,
donde:
32.5 02 +
AI plantear Y resolver
que 0l = 0s : 0, Por ser
Hr(4+6) + vaQJTll - Mt-z - Ma-: - 1'5(16) (8) = 0
.. M1-2 +M2-1
¡¡ I
4
yo =
M3-4 + M4-sj 1'5 '(8) '(4)
60'0r +60 04 -20' 4 +20'
^Z
+ 48
"4=
------'--------
:
a//J
100 03 + B0 0q - 45 A1 + 30 A2 - 104:0
eI sistema de ecuaciones se
arnbos apoyos emPotrados '
(s)
cons idera
Soluciones Y momentos finales:
0z: 0-73512t
0: : -0.030755
0s : -0.6123L9
^.
= -1 .816965
Lz = -t'679950
13.4 9
-17.86
-1 2.96
ing. N. González V. @ 2007](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-199-320.jpg)
![Apuntes y problemas de Estructuras H¡perestáticas
EjempJ-o:
donde:
Pórtico para
. articulados.
nave industrial
'1.50 T/m
con apoyos
I
3.00
+
I
4.00
I
I
r loo
]-I
tlel tri-ángulo cie deformaciones :
/l a1 - A2
¿t,,/l¡,
/ I ! sen(2o)
1t
Ar-A¡
sen(90-e) sen(90-a)
senü, =
A::
J
ar-Az
^ --ol -' 2sen(cr)
i;,
a3=a+=f(ar-az)
I
I
(
{
lng. N. González V. @ 2007 - 197 -
-_--.-](https://image.slidesharecdn.com/analisisestructuralhiperi-141115182220-conversion-gate01/85/Analisis-estructural-200-320.jpg)







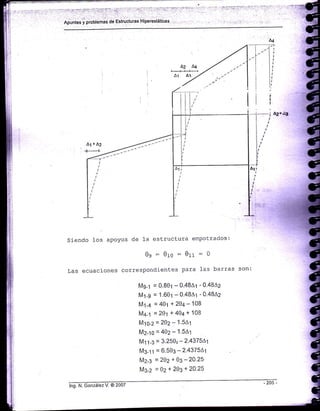




Este documento presenta una introducción a las estructuras hiperestáticas. Explica conceptos clave como nudos continuos, grados de libertad, geometría de estructuras, propiedades de los materiales y teorías generales para barras sometidas a fuerzas normales y tangenciales. También incluye tablas con propiedades físicas comunes de materiales de construcción e información sobre unidades de medida.









































































