
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a METODO DE LAS FUERZAS O FLEXIBILIDADES.pdf
Similar a METODO DE LAS FUERZAS O FLEXIBILIDADES.pdf (20)
Último
Último (20)
METODO DE LAS FUERZAS O FLEXIBILIDADES.pdf
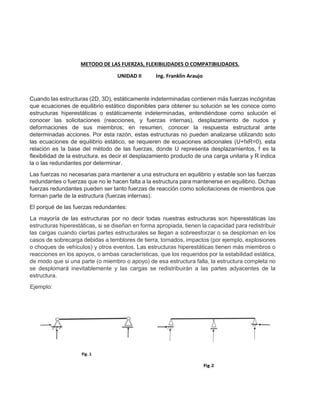
- 1. METODO DE LAS FUERZAS, FLEXIBILIDADES O COMPATIBILIDADES. UNIDAD II Ing. Franklin Araujo Cuando las estructuras (2D, 3D), estáticamente indeterminadas contienen más fuerzas incógnitas que ecuaciones de equilibrio estático disponibles para obtener su solución se les conoce como estructuras hiperestáticas o estáticamente indeterminadas, entendiéndose como solución el conocer las solicitaciones (reacciones, y fuerzas internas), desplazamiento de nudos y deformaciones de sus miembros; en resumen, conocer la respuesta estructural ante determinadas acciones. Por esta razón, estas estructuras no pueden analizarse utilizando solo las ecuaciones de equilibrio estático, se requieren de ecuaciones adicionales (U+fxR=0), esta relación es la base del método de las fuerzas, donde U representa desplazamientos, f es la flexibilidad de la estructura, es decir el desplazamiento producto de una carga unitaria y R indica la o las redundantes por determinar. Las fuerzas no necesarias para mantener a una estructura en equilibrio y estable son las fuerzas redundantes o fuerzas que no le hacen falta a la estructura para mantenerse en equilibrio. Dichas fuerzas redundantes pueden ser tanto fuerzas de reacción como solicitaciones de miembros que forman parte de la estructura (fuerzas internas). El porqué de las fuerzas redundantes: La mayoría de las estructuras por no decir todas nuestras estructuras son hiperestáticas las estructuras hiperestáticas, si se diseñan en forma apropiada, tienen la capacidad para redistribuir las cargas cuando ciertas partes estructurales se llegan a sobreesforzar o se desploman en los casos de sobrecarga debidas a temblores de tierra, tornados, impactos (por ejemplo, explosiones o choques de vehículos) y otros eventos. Las estructuras hiperestáticas tienen más miembros o reacciones en los apoyos, o ambas características, que los requeridos por la estabilidad estática, de modo que si una parte (o miembro o apoyo) de esa estructura falla, la estructura completa no se desplomará inevitablemente y las cargas se redistribuirán a las partes adyacentes de la estructura. Ejemplo:
- 2. La viga de la fig.1 es una viga isostática, posee tres reacciones o incógnitas (dos horizontales y una vertical) y tres ecuaciones de equilibrio (ƩFx=0, ƩFy=0, ƩMz=0), es decir tres incógnitas para tres ecuaciones de equilibrio, la viga se puede resolver por estática. La viga de la Fig.2 es hiperestática posee cinco reacciones o incógnitas (dos reacciones horizontales y tres reacciones verticales), y solo disponemos de tres ecuaciones de equilibrio (ƩFx=0, ƩFy=0, ƩMz=0), necesitando dos ecuaciones más para cinco, y estas ecuaciones adicionales las obtenemos, de la compatibilidad de deformaciones y desplazamientos (U+fxR=0). 1.El Método de las Fuerzas (MF): Este método es en realidad el método de las deformaciones compatibles, permite resolver estructuras hiperestáticas, o “estáticamente indeterminadas”, al agregar las ecuaciones necesarias, que sumadas a las ecuaciones de equilibrio que provee la estática, alcanzan en número a la cantidad de incógnitas de la estructura. Este método se basa en la flexibilidad del sistema (f) estructural, se determinan directamente los valores de fuerzas y momentos con los que se construyen los diagramas de solicitaciones. Las fuerzas no necesarias para mantener a una estructura en equilibrio y estable son las fuerzas redundantes. El método de fue presentado por James Maxwell en 1864 y ampliado 10 años mas tarde por otto Mohr, y comprende en esencia la eliminación de suficientes fuerzas hiperestáticas(redundantes), para volver estáticamente determinada (isostática) a la estructura, además debe ser estáticamente estable. Esta estructura liberada de la hiperestaticidad para hacerla isostática se le conoce como isostática fundamental o estructura primaria.
- 3. 2.Principio de superposición: El principio de superposición es la herramienta de solución en la que se fundamentan la mayoría de los métodos de análisis estructural, permite descomponer un problema lineal en dos o más subproblemas más sencillos, de tal manera que el problema original se obtiene como "superposición" o "suma" de estos subproblemas sencillos.
- 4. 3.Formulación del método: VIGAS (Sin fuerza axial) a. Clasificación estática de la estructura: Se refiere al orden o grado de estabilidad o inestabilidad estática, que está relacionado con el grado de hiperestaticidad de la estructura. Y se determina aplicando cualquiera de las dos fórmulas: a.1.GHT= GHE + GHI. a.2 GHT= NEM x NB + NR – NEE x NN b. Se elige la isostática fundamental o estructura primaria, eliminando los grados de hiperestaticidad calculados anteriormente, los cuales pueden ser externos (reacciones) o internos (elementos mecánicos). Para esta viga GHT=2, por lo que Se deberán eliminar dos fuerzas Redundantes bien sea externa o interna.
- 5. Nota: Al no haber fuerza horizontal HA=0, las ecuaciones de equilibrio se reducen a NEE= 2 y el número de fuerzas internas NEM=2, para el uso de la formula general. Para el caso de la formula GHT=GHE+GHI, las ecuaciones de equilibrio NEE= 3. Posibles estructuras primarias, estables e isostáticas.
- 6. c. Se analiza la estructura primaria con las cargas reales, para determinar los desplazamientos (Δp), en el lugar y en la dirección de las redundantes eliminadas. ΔBP = Desplazamiento en B por las cargas reales. ΔCP= Desplazamiento en C por las Cargas reales. d. Se aplica una carga unitaria a la estructura primaria sin las cargas reales, en el punto y en la dirección contraria al de la o las redundantes eliminadas y se determina la deflexión ΔBB, ΔCB, ΔCB, ΔCC ha de hacerse notar que la deflexión ΔAP y ΔCP, están en sentido contrario a las deflexiones ΔBB, ΔCB, ΔBC, ΔCC para de esta manera restablecer en la estructura su condición original en B Y C, en donde por existir el desplazamiento es cero. A esta estructura con la carga unitaria se le denomina la complementaria y hay tantas complementarias como grados de hiperestaticidad tenga la estructura.
- 7. ΔBB = Desplazamiento en B por una Carga unitaria aplicada en B. ΔCB= Desplazamiento en C por una Carga unitaria aplicada en B ΔBC = Desplazamiento en B por una Carga unitaria aplicada en C. ΔCC= Desplazamiento en C por una Carga unitaria aplicada en C. El desplazamiento debido a una carga unitaria es el coeficiente de flexibilidad (f). Que también es el inverso de la rigidez (f=1/K), donde K es la rigidez de la estructura e. Se plantean las Ecuaciones de Compatibilidad de Deformaciones del sistema, aplicando el Principio de superposición.
- 8. = = + Los desplazamientos en el nudo B, C (ΔB, ΔC) por el principio de superposición es la suma del desplazamiento del nudo B y C producido por las cargas reales (ΔBP, ΔCP) más los desplazamientos producidos por las cargas unitarias virtuales en los nudos B, C (ΔBB, ΔBC, ΔCB + ΔCC). Como en el sistema real el apoyo B, C no tiene desplazamientos ΔB =0, ΔC=0. F= K x Δ y K=1/f sustituyendo por lo tanto F= 1/f x Δ, por lo tanto: Δ= F x f donde F serán las fuerzas externas o internas redundantes (momento, axial, corte, reacción) ΔB = ΔBP + ΔBB + ΔBC --------- ΔBP + fBB x RB + fBC x RC = 0 ----------- (1.e) ΔC = ΔCP + ΔCB + ΔCC --------- ΔCP + fcB x RB + fcc x RC = 0 --------- (1.d) Escribiendo en forma matricial: ΔBP fBB fBC RB 0 + x = ΔCP fcB fcC RC 0
- 9. f. De las ecuaciones (1.e y e.d) se calculan los desplazamientos ΔBP, ΔCP, fBB, fBC, fcB, fcc por el principio de los trabajos virtuales o por cualquier otro método conocido. g. Conocidas la o las redundantes se calculan el resto de las fuerzas externas o internas, con las fuerzas de equilibrio y procedemos a graficar los diagramas de: . Fuerza axial . Fuerza de corte . Momento flector . Momento torsol. De acuerdo al tipo de elemento estructural y al tipo de cargas que soliciten a la estructura. La forma canónica de las ecuaciones de superposición del método de las fuerzas para un sistema con n cantidad de redundantes como incógnita, es: ΔBP + fBB x RB + fBc x Rc --------- + fan x Rn = Δa ΔcP + fcB x RB + fcc x Rc -------- + fbn x Rn = Δb ΔnP + fnb x Rb + fnc x Rc ------- + fnn x Rn = Δn
- 10. Escribiendo en forma matricial: ΔBP fBB fBc ------- fan X Rn = Δa ΔcP fcB fcc ------- fbn x Rn = Δb + ΔnP fnb fnc -------- fnn x Rn = Δn PORTICOS. El pórtico GHT= 3, por lo que se deberán Eliminar tres redundantes (externas o internas). .
- 11. Posibles estructuras primarias, estables e isostáticas. En esta primera primaria se eliminaron Dos reacciones externas de momento (MA; MC) y una interna de momento (MB). El pórtico es isostático y estable. En esta segunda primaria se eliminaron dos Dos reacciones externas el momento (MC) Y la reacción vertical VC, y una interna (MB) El pórtico es isostático y estable. ARMADURAS. En la armadura GHT=1, por lo que se
- 12. Deberá quitar una sola fuerza redundante. Sea externa o interna. Posibles estructuras primarias, que sean estables e isostáticas. En esta primera primaria se eliminó la Reacción externa VB. La armadura es isostática y estable. En esta segunda primaria se eliminó la Fuerza interna como se muestra en la fig. La armadura es isostática y estable. Nota: Ha de hacerse notar que la escogencia de la estructura primaria depende del calculista, el cual debe garantizar que la estructura sea isostática y estable. El desplazamiento en el nudo B por el principio de superposición es la suma del desplazamiento del nudo B producido por las cargas reales (Δ1p) más el desplazamiento producido por la carga unitaria virtual (Δ11) en el nudo B. Como en el sistema real el apoyo B no tiene desplazamiento ΔB=0 ΔB= Δ1p + Δ11 --------- Δ1p + Δ11=0 -------F= K x Δ y K=1/f sustituyendo por lo tanto F= 1/f x Δ, por lo tanto:
- 13. Δ= F x f donde F serán las fuerzas externas o internas redundantes (momento, axial, corte, reacción) Δ11 = f11 x Vb --------- Δ1p + f11 x Vb = 0. (1.e) f. De la ecuación (1.e) se calculan los desplazamientos Δ11 y f11 por el principio de los trabajos virtuales o por cualquier otro método conocido. g. Conocidas la o las redundantes se calculan el resto de las fuerzas externas o internas, con las fuerzas de equilibrio y procedemos a graficar los diagramas de: . Fuerza axial . Fuerza de corte . Momento flector . Momento torsol. De acuerdo al tipo de elemento estructural y al tipo de cargas que soliciten a la estructura.
- 14. Método aproximado de integración numérica: a. Método de Vereschaguin (para figuras regulares, triángulos y rectángulos). 1 x Δ = ∫ Mp x M1 dx / EI -------Donde: 1. Mp x M1= Área de Mp x YcgM1
- 15. 2. Mp x M1= Área de M1 x YcgMp se puede usar cualquiera de las dos b. Método de Simpson (para figuras irregulares, trapecio y parábolas).
- 16. REPASO ESTRUCTURAS ISOSTATICAS Ejemplo1: Dibujar los diagramas de cortante y momento para la viga mostrada. a. Cálculo de las reacciones: La estructura es isostática tiene tres reacciones (VA, HA, VB) se pueden aplicar las tres ecuaciones de equilibrio (ΣFX=0, ΣFY=0, ΣMZ=0): ------ HA=0 -------- - VB x 12 + 3600 x 3 + 1800 x 9 =0 ----- - VB x 12 +1080 + 10800 VB= 2250 Kg
- 17. -------- -3600-1800+2250+VA=0 ----- VA= 3150 Kg Diagramas de corte y momento Cálculo de los Cortes: 3150-3600= -450 Kg -450-1800= -2250 Kg Cálculo de los momentos por área del Diagrama de corte: 3150 x 3= 9450 kg x m 9450 kg x m – 450 x 6= -2250 Kg x m -2250 +2250 =0
- 18. Ejemplo1: 1.Grados de indeterminación estática GHT: a. GHT=GHE + GHI GHT= (5-3-0) + (3 x 3 – 3 x 4 + 3) = 2 b. GHT= 3 x 3 + 5 – 3 x 3 =2 1 2 posibles primarias isostática Y estables. 3 4
- 19. Trabajaremos con la 1: 2. Se analiza la estructura primaria por cargas: + ƩFx=0 HA=0 + ΣMA=0 2 x 13 x 13 / 2 – VD x 13= 0 VD= 13 Ton + ƩFy=0 -2 x 13 + VA + 13 =0 VA= 13 Ton
- 20. Diagrama de momento (MP): Cálculo del cortante: V= 13 - 2 x 13= -13 Ton Calculo momento por área Del diagrama de corte: X / 13 = (13 – X) / 13 13X=169 – 13X--- X =6.5 m M= 13x6.5/2 –-- M= 42.25 Ton x m 3.Se aplica unitaria (1 Ton) a la estructura en los nudos donde se eliminaron las reacciones:
- 21. + ƩFx=0 HA=0 + ΣMA=0 1 x 4 – VD x 13= 0 VD= 0.308 Ton + ƩFy=0 - 0.308 + VA + 1 =0 VA= 0.692 Ton
- 22. + ƩFx=0 HA=0 + ΣMA=0 1 x 8 – VD x 13= 0 VD= 0.615 Ton + ƩFy=0 - 0.615 + VA + 1 =0 VA= 0.385 Ton
- 23. 4. Ecuaciones de compatibilidad. : ΔBP + ΔBB + ΔBC =0-- ΔBP + fBB X RB + fBC X RC=0 (1) ΔCP + ΔCB + ΔCC =0 -- ΔCP + fCB X RB + fCC X RC=0 (2) ΔBP= desplazamiento en B debido a las cargas reales. ΔCP= desplazamiento en C debido a las cargas reales. . fBB= desplazamiento en B debido a la carga unitaria en B. fBC desplazamiento en B debido a una carga unitaria en C. fCB= desplazamiento en C debido a una carga unitaria en B fcc= desplazamiento en C debido a la carga unitaria en C.
- 24. Cálculo de los desplazamientos por trabajo virtual: ΔBP 1 x ΔBP= ∫Mp x MB x dx / EI ΔBP= -4 / (6 x E x I) x 0 x 0 + 4 x 22 x 1.385 + 36 x 2.77 = -147.73 / EI -4 / (6 x E x I) x 36 x 2.77 + 4 x 42 x 2.155 + 40 x 1. 54 =-348.91 / EI -5 / (6 x E x I) x 40 x 1.54 + 4 x 26.25 x 0.77 + 0 x 0 = -118.71 / EI
- 25. ΔBP= -615.25 / EI ΔCP 1 x ΔCP= ∫Mp x MC x dx / EI ΔCP= -4 / (6 x E x I) x 0 x 0 + 4 x 22 x 0.77 + 36 x 1.54 = -82.13 / EI -4 / (6 x E x I) x 36 x 1.54 + 4 x 42 x 42 x 2.31 + 40 x 3.08 =-377.81 / EI -5 / (6 x E x I) x 40 x 3.08 + 4 x 26.25 x 1.54 + 0 x 0 = -237.41 / EI
- 26. ΔCP= --697.35 / EI fBB 1 x fBB= ∫Mp x MC x dx / EI fBB= 1/ (E x I) x 1/2 x 4 x 2.77 x (2/3) x 2.77 = 10.23 / EI 4 / (6 x E x I) x 2.77 x 2.77 + 4 x 2.155 x 2.155 + 1.54 x 1.54 = 19.08 / EI
- 27. 1 / (E x I) x 1/2 x 5 x 1.54 x (2/3) x 1.54 = 3.95 / EI ΔCP= 33.26 / EI fBc = fcB 1 x fBc= fcB= ∫MB x MC x dx / EI fBC= fCB= 1/ (E x I) x 1/2 x 4 x 2.77 x (2/3) x 1.54 = 5.69 / EI 4 / (6 x E x I) x 2.77 x 1.54 + 4 x 2.155 x 2.31 + 1.54 x 3.08 = 19.28 / EI
- 28. 1 / (E x I) x 1/2 x 1.54 x 5 x (2/3) x 3.08 = 7.91 / EI fBC= fCB = 32.88 / EI fCC 1 x fCC= ∫MC x MC x dx / EI fCC = 1/ (E x I) x 1/2 x 4 x 1.54 x (2/3) x 1.54 = 3.16 / EI 4 / (6 x E x I) x 1.54 x 1.54 + 4 x 2.31 x 2.31 + 3.08 x 3.08 = 22.13 / EI
- 29. 1 / (E x I) x 1/2 x 5 x 3.08 x (2/3) x 3.08 = 15.81 / EI fCC= 41.10 / EI Sustituyendo en las ecuaciones 1 y 2 -615.25/EI +33.26 /EI x RB +32.88 x RC /EI=0 -615.25 + 33.26 x RB + 32.88 x RC=0 -697.35/ EI +32.88 /EI x RB+41.10 x RC /EL=0 -697.35 + 32.88 x RB + 41.1 x RC=0 Despejando RB= 18.50 -0.99 x RC -697.35 + 32.88 x (18.5 -0.99 x RC) +41.10 x RC=0 -91.07 + 8.55 X RC=0 RC= 10.65 Ton. RB= 18.5 – 0.99 x10.65 RB= 7.99 Ton. 5.Conocidas dos reacciones podemos calcular el resto por las ecuaciones de equilibrio:
- 30. + ΣFX=0 HA=0 + ΣMA= 0 -7.96 x 4 -10.65 x 8 -VD x 13 + 2x 13 x 13 /2=0 VD= 3.99 Ton + ΣMD= 0 7.96 x 9 + 10.65 x 5 -VA x 13 - 2x 13 x 13 /2=0 VA= 3.40 Ton Comprobación de equilibrio: + ΣFY=0 -2 X 13 + 7.96 + 10.65 + 3.99 + 3.40=0 0=0 (EQUILIBRIO) 6.Diagramas de cortante y momento flector.
- 31. Ejemplo 2: Calcular las reacciones y trazar el diagrama de momento de la estructura. 1.GHT= 3 x 2 +4 -3 x 3=1 Se elimina de la estructura el grado de indeterminación estática eligiendo una primaria.
- 32. 2.Se analiza la estructura primaria con las cargas reales: + ΣMA=0 VC x 9 +135 x 3 – 270 x 6=0 VC=225 KN + ƩFy=0 -135-270+VA+225=0 VA=180 KN
- 33. Diagrama de momentos de las cargas reales. MP 3. Se analiza la estructura colocando una carga unitaria donde se eliminó temporalmente la reacción (HC).
- 34. + ΣMA=0 VC x 9 - 1 x 6 =0 VC= 0.67 KN + ƩFy=0 -0.67+VA=0 VA=0.67 KN + ƩFX=0 HA-1=0 HA=1 KN Diagrama de momentos por la carga virtual. MC
- 35. 4.Ecuaciones de compatibilidad. ΔCP + ΔCC = ΔC ----- ΔCP + fCC X HC=0 (1)
- 36. ΔCP 1 x ΔCP= ∫MP x MC x dx / EI fCC = -3/ (6 x E x I) x 0 x 6 + 4 x 270 x 5 + 540 x 4 = -3780 / EI -3 / (6 x E x I) x 540 x 4 + 4 x 607.5 x 3 + 675x 2 = -5400 / EI - 1 / (E x I) x 1/2 x 675 x 3 x (2/3) x 2 = -1350 / EI fCC= -10530 / EI
- 37. fCC 1 x fCC= ∫MC x MC x dx / EI fCC = 1/ (E x I) x 1/2 x 6 x 6 x (2/3) x 6 = 72 / EI 3 / (6 x E x I) x 6 x 6 + 4 x 5 x 5 + 4x 4 = 76 / EI 3 / (6 x E x I) x 4 x 4 + 4 x 3 x 3 + 2x 2 = 28 / EI
- 38. 1 / (E x I) x 1/2 x 2 x 3 x (2/3) x 2 = 4 / EI fCC= 180 / EI Sustituyendo en la ecuación 1: -10530 / EI + 180 HC / EI=0 -10530 + 180 x HC=0 HC= 58.5 Ton 5.Conocidas dos reacciones podemos calcular el resto por las ecuaciones de equilibrio:
- 39. + ΣFX=0 HA – 58.5 =0 HA=58.5 Ton + ΣMA= 0 -VC x 9 +135 x 3 + 270 x 6 - 58.5 x 6=0 VC= 186 Ton + ΣMC= 0 VA x 9 - 135 x 6 – 270 x 3 – 58.5 x 6 VA= 219 Ton Comprobación de equilibrio: + ΣFY=0 -135 - 270+ 186 + 219=0 0=0 (EQUILIBRIO) 6.Diagramas de cortante y momento flector.
- 41. Anexos