Descargado 242 veces




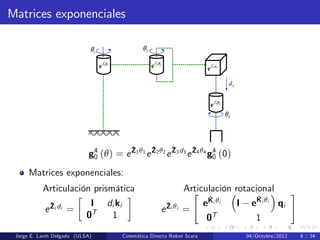













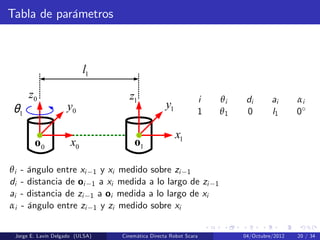




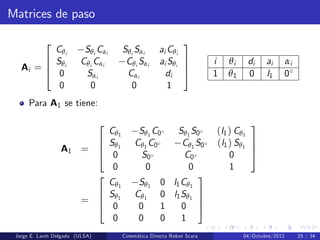









Este documento presenta la cinemática directa de un robot Scara. Explica la teoría de tornillos para modelar la cinemática del robot. Define las configuraciones inicial y final del robot, así como los ejes de rotación y traslación de cada articulación. Deriva las matrices exponenciales para cada articulación y utiliza estas matrices para calcular la pose final del efector usando la ecuación de cinemática directa.


























































