
Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (20)
Similar a Cinemática del Robot Cartesiano.pptx
Similar a Cinemática del Robot Cartesiano.pptx (20)
Último
Último (20)
Cinemática del Robot Cartesiano.pptx
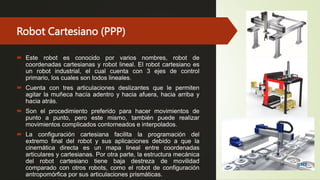
- 1. Robot Cartesiano (PPP) Este robot es conocido por varios nombres, robot de coordenadas cartesianas y robot lineal. El robot cartesiano es un robot industrial, el cual cuenta con 3 ejes de control primario, los cuales son todos lineales. Cuenta con tres articulaciones deslizantes que le permiten agitar la muñeca hacía adentro y hacia afuera, hacia arriba y hacia atrás. Son el procedimiento preferido para hacer movimientos de punto a punto, pero este mismo, también puede realizar movimientos complicados contorneados e interpolados. La configuración cartesiana facilita la programación del extremo final del robot y sus aplicaciones debido a que la cinemática directa es un mapa lineal entre coordenadas articulares y cartesianas. Por otra parte, la estructura mecánica del robot cartesiano tiene baja destreza de movilidad comparado con otros robots, como el robot de configuración antropomórfica por sus articulaciones prismáticas.
- 2. Convención de Denavit-Hartenberg Para obtener la cinemática directa cartesiana del robot cartesiano, es necesario realizar el análisis de sus componentes además del comportamiento de estos. De aquí salen unas características importantes, las cuales son: Longitud del eslabón i-ésimo 𝑙𝑖 Las articulaciones lineales o prismáticas 𝑑𝑖 El ángulo entre los ejes 𝑧𝑖−1 y 𝑧𝑖 medido con respecto al eje 𝑥𝑖 (𝛼𝑖) Las articulaciones rotacionales, quien representa el ángulo entre los ejes 𝑥𝑖−1 y 𝑥𝑖, que se miden alrededor del eje 𝑧𝑖−1. Se toma como la longitud del eslabón 𝑙𝑖
- 3. Cinemática Directa del Robot Cartesiano Los robots cartesianos tienen forma de paralelepípedo recto. Su sistema de referencia cartesiano fijo ∑0(𝑥0, 𝑦0, 𝑧0) se selecciona de manera conveniente. El eje 𝑧0 determina el desplazamiento lineal de la primera articulación prismática 𝑑1, el origen del sistema ∑0(𝑥0, 𝑦0, 𝑧0) se encuentra ubicado en [0, 0, 𝑙1] donde 𝑙1 es la longitud de las barras del robot cartesiano. Los ejes 𝑥0 y 𝑦0 son alineados por regla de la mano derecha. Imagen tomada del libro de: Reyes, F. “MATLAB aplicado a robótica y mecatrónica”. México (2012). Editorial ALFAOMEGA.
- 4. Origen del Sistema de Referencia Primera Articulación Prismática Imagen tomada del libro de: Reyes, F. “MATLAB aplicado a robótica y mecatrónica”. México (2012). Editorial ALFAOMEGA.
- 5. Para ∑1(𝑥1, 𝑦1, 𝑧1): Al rotar el eje 𝑥0 un ángulo 𝛼1 = − 𝜋 2 , quedando el eje 𝑧1 en dirección positiva de la variable 𝑑2. Observe que el eje 𝑦1 apunta en dirección negativa del eje 𝑧0 y el eje 𝑥1es paralelo al eje 𝑥0, separado evidentemente por la dimensión física de la mesa cartesiana denotada por la longitud 𝑙2. Se toma como segunda articulación prismática 𝑑2 Imagen tomada del libro de: Reyes, F. “MATLAB aplicado a robótica y mecatrónica”. México (2012). Editorial ALFAOMEGA.
- 6. El sistema ∑2(𝑥2, 𝑦2, 𝑧2) sirve para medir el desplazamiento lineal de la variable articular 𝑑3 . No obstante, el tercer sistema de referencia no es trivial, ya que no se puede deducir directamente del sistema ∑1(𝑥1, 𝑦1, 𝑧1) porque no existe un ángulo 𝛼2 alrededor del eje 𝑥1 que genere el sistema de referencia ∑2(𝑥2, 𝑦2, 𝑧2) . Para el sistema ∑2(𝑥2, 𝑦2, 𝑧2) , primero se emplea un sistema de referencia auxiliar denominado ∑2𝑎(𝑥2𝑎, 𝑦2𝑎, 𝑧2𝑎) el cual se obtiene realizando una rotación de 90 grados con respecto al eje 𝑧1, esta rotación hace que el eje 𝑥2𝑎 permanezca paralelo al eje 𝑦1. Debe observarse que los ejes 𝑧1 y 𝑧2𝑎 son paralelos entre sı de tal manera que sus coordenadas ( 𝑑2 ) entre estos ejes sean idénticas. 𝒅𝟐 Imagen tomada del libro de: Reyes, F. “MATLAB aplicado a robótica y mecatrónica”. México (2012). Editorial ALFAOMEGA. 𝒅𝟐 𝑹𝒆𝒂𝒍𝒊𝒛𝒂𝒄𝒊ó𝒏 𝒅𝒆 𝒍𝒂 𝒓𝒐𝒕𝒂𝒄𝒊ó𝒏
- 7. El origen del sistema de referencia auxiliar ∑2𝑎(𝑥2𝑎, 𝑦2𝑎, 𝑧2𝑎) es el mismo que el sistema de referencia ∑1(𝑥1, 𝑦1, 𝑧1), pero el sistema ∑2𝑎(𝑥2𝑎, 𝑦2𝑎, 𝑧2𝑎) mantiene una rotación relativa al sistema ∑1(𝑥1, 𝑦1, 𝑧1) expresada por la matriz rotación 𝑅𝑧1( 𝜋 2 ). Imagen tomada del libro de: Reyes, F. “MATLAB aplicado a robótica y mecatrónica”. México (2012). Editorial ALFAOMEGA.
- 8. Imagen tomada del libro de: Reyes, F. “MATLAB aplicado a robótica y mecatrónica”. México (2012). Editorial ALFAOMEGA. Por último, al girar un angulo: 𝛼2 = 𝜋 2 alrededor del eje 𝑥2𝑎 se obtiene el sistema de referencia ∑2(𝑥2, 𝑦2, 𝑧2). Donde la articulación prismática 𝑑3 se mueve linealmente sobre el eje 𝑧2. Esta ultima rotación 𝛼2 alrededor del eje 𝑥2 determina el ángulo entre los ejes 𝑧2 y 𝑧1. Los ejes 𝑧0, 𝑧1 y 𝑧2 son mutuamente perpendiculares entre sí. 𝒅𝟑 Tercera articulación prismática
- 9. Tabla de Parámetros de Denavit-Hartenberg para el robot cartesiano de tres grados de libertad Es importante recordar que, debido a que la posición del sistema se encuentra en el suelo, 𝑙1, 𝑙2 𝑦 𝑙3 son cero.
- 10. Denavit-Hartenberg para el PPP La representación de Denavit-Hartenberg nos indica que cada transformación homogénea 𝐻𝑖−1 𝑖 se representa por el producto de cuatro transformaciones básicas: De forma que, al multiplicar los valores anteriores se obtiene lo siguiente:
- 11. Para obtener las matrices de transformación homogénea, se sustituyen los valores de los eslabones, con respecto a sus interacciones. Tomando como base el resultado teórico del algoritmo de Denavit-Hartenberg obtenido anteriormente, se tiene la representación de las primeras dos matrices. Debido al valor de 𝜃𝑖 lo obtenido de s𝑒𝑛 𝜃1,2 = 0 y cos 𝜃1,2 = 1, 𝑙1,2 vuelve 0 el producto donde participa. 𝛼𝑖 en ambos eslabones tiene un valor de − 𝜋 2 , donde sen 𝛼1,2 = −1 y cos 𝛼1,2 = 0. Por último se agrega el 𝑑1 y 𝑑2 para concluir con la representación como se muestra en 𝐻0 1 y 𝐻1 2 . Obtención de las matrices de transformación homogénea
- 12. Obtención de las matrices de transformación homogénea Es necesario obtener la matriz de transformación homogénea de la referencia auxiliar para obtener el segundo sistema de referencia, donde su valor de 𝛼2𝑎 = 0 y 𝜃2𝑎 = 𝜋 2 . Los valores correspondientes de 𝑠𝑒𝑛 𝜃2𝑎 = 1 y cos 𝜃2𝑎 = 0 , al igual que los valores de sen 𝛼2𝑎 = 0 y cos 𝛼2𝑎 = 1 , al no tener un valor de distancia esta se vuelve cero, teniendo como resultado la matriz representativa de 𝐻𝑅𝑧1 ( 𝜋 2 )𝑇 . Como ultimo paso, para obtener la matriz de transformación homogénea 𝐻2𝑎 se multiplican las matrices 𝐻𝑅𝑧1 ( 𝜋 2 )𝑇 y 𝐻1 2 .
- 13. Para la matriz 𝐻2 3 , a diferencia de los eslabones uno y dos, 𝛼3 = 0 volviendo los valores de s𝑒𝑛 𝛼3 = 0 y cos 𝛼3 = 1. Y manteniendo los valores de s𝑒𝑛 𝜃3 = 0 y cos 𝜃3 = 1. En consecuencia, al sustituir 𝑑3 y el valor nulo de 𝑙3, se obtienen los valores de la matriz de transformación homogénea.
- 14. Finalmente, se realiza la multiplicación de las tres matrices, 𝐻0 1 , 𝐻2𝑎 y𝐻2 3 para obtener la matriz de transformación homogénea 𝐻0 3 . De la matriz obtenida se puede apreciar el los valores obtenidos de la matriz 𝑎1,3, 𝑎2,3 y 𝑎3,3, quienes son los valores de la cinemática directa del robot cartesiano, denotado 𝑓𝑅(𝑞).
- 15. Obtención del Jacobiano Es necesario realizar el jacobiano del robot para de esta forma comprobar si existen problemas de singularidad en su comportamiento.
- 16. Tomando en cuenta que se tienen las variables 𝑑1, 𝑑2 y 𝑑3, el jacobiano del robot cartesiano 𝐽 𝑑3, 𝑑2, 𝑑3 = 𝜕𝑓𝑅(𝑞) 𝜕𝑞 se expresa como: Al obtener el determinante del jacobiano, se tiene que: det 𝐽 𝑑3, 𝑑2, 𝑑3 = 1. Por lo tanto la configuración cartesiana no tiene singularidades.
- 17. Cinemática inversa La función de cinemática inversa del robot cartesiano termina convirtiendo las coordenadas del extremo final (𝑥0, 𝑦0, 𝑧0) del sistema ∑0(𝑥0, 𝑦0, 𝑧0) a las coordenadas articulares 𝑑1, 𝑑2, 𝑑3 , por lo tanto, se tiene que: 𝑑3 = 𝑥0 𝑑2 = 𝑦0 𝑑1 = 𝑧0