Descargado 278 veces






![7
Se completará el análisis cinemático directo mediante el algoritmo de D-H, y también se
utilizará la matriz Jacobiana para encontrar las relaciones entre las velocidades
articulares del robot planar y las del efector final.
Dentro de este texto se empleará la notación siguiente: sen 𝜃 = 𝑠 𝜃, cos 𝜃 = 𝑐 𝜃 y
sen 𝜃𝑖 = 𝑠𝑖, cos 𝜃𝑖 = 𝑐𝑖, cuando sea claro.
El algoritmo D-H hace uso de matrices de transformación homogénea para la cinemática
directa. Una matriz de transformación homogénea es una matriz de 4x4 y permite llevar
a cabo la transformación de coordenadas homogéneas para cambiar de base. En otras
palabras, es útil para convertir un vector entre distintos marcos de referencia. En el caso
de un robot, estos marcos de referencia corresponden a cada uno de los eslabones que
lo forman. Una matriz de transformación homogénea tiene la forma siguiente (Barrientos,
1996):
[
𝑹 𝑻
𝒑 𝑤
]
Donde 𝑹 es una matriz de rotación de 3x3; 𝑻, un vector de traslación de 3x1; 𝒑, un vector
de 3x1 de perspectiva y 𝑤 es un factor de escalado. Al trabajar con la cinemática del
robot, 𝒑 será siempre un vector nulo y 𝑤, será igual a uno.
En el caso particular del algoritmo D-H, la matriz 𝑨𝑖−1
𝑖
que relaciona a los marcos del
eslabón 𝑖 y el eslabón 𝑖 − 1 se construye como una secuencia específica de movimientos
con respecto al marco actual de referencia: una rotación 𝜃𝑖 alrededor del eje 𝑧𝑖−1, una
traslación 𝑑𝑖 a lo largo del mismo eje, una traslación 𝑎𝑖 a lo largo del eje 𝑥𝑖 y finalmente
una rotación 𝛼𝑖 en éste (Spong, 2004). En notación matricial:
𝑨𝑖−1
𝑖
= 𝑅𝑜𝑡(𝑧, 𝜃𝑖)𝑇𝑟𝑎𝑛𝑠(𝑧, 𝑑𝑖)𝑇𝑟𝑎𝑛𝑠(𝑥, 𝑎𝑖)𝑅𝑜𝑡(𝑥, 𝛼𝑖)
𝑨𝑖−1
𝑖
= [
𝑐 𝜃 𝑖
−𝑠 𝜃 𝑖
0 0
𝑠 𝜃 𝑖
𝑐 𝜃 𝑖
0 0
0 0 1 0
0 0 0 1
] [
1 0 0 0
0 1 0 0
0 0 1 𝑑𝑖
0 0 0 1
] [
1 0 0 𝑎𝑖
0 1 0 0
0 0 1 0
0 0 0 1
] [
1 0 0 0
0 𝑐 𝛼𝑖
−𝑠 𝛼𝑖
0
0 𝑠 𝛼𝑖
𝑐 𝛼𝑖
0
0 0 0 1
]](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-8-320.jpg)
![8
𝑨𝑖−1
𝑖
= [
𝑐 𝜃 𝑖
−𝑠 𝜃 𝑖
𝑐 𝛼𝑖
𝑠 𝜃 𝑖
𝑠 𝛼𝑖
𝑎𝑖 𝑐 𝜃 𝑖
𝑠 𝜃 𝑖
𝑐 𝜃 𝑖
𝑐 𝛼𝑖
−𝑐 𝜃 𝑖
𝑠 𝛼𝑖
𝑎𝑖 𝑠 𝜃 𝑖
0 𝑠 𝛼𝑖
𝑐 𝛼𝑖
𝑑𝑖
0 0 0 1
] (5.1)
Donde 𝜃𝑖, 𝑑𝑖, 𝑎𝑖 y 𝛼𝑖 reciben el nombre de parámetros de D-H.
Por otra parte, también se requiere conocer la relación entre las velocidades del extremo
del brazo y las velocidades de las coordenadas articulares de él. Aquí es necesaria una
matriz adicional conocida como Jacobiana o simplemente el Jacobiano del robot
(Barrientos, 1996). Considerando para un robot de planar de 2 GDL que:
𝑥 = 𝑓1(𝑞1, 𝑞2)
𝑦 = 𝑓2(𝑞1, 𝑞2)
Si se derivan estas expresiones con respecto al tiempo, se tiene:
𝑑𝑥
𝑑𝑡
=
𝑑
𝑑𝑡
𝑓1(𝑞1, 𝑞2)
𝑑𝑦
𝑑𝑡
=
𝑑
𝑑𝑡
𝑓2(𝑞1, 𝑞2)
Estas ecuaciones se pueden agrupar dentro de una matriz, el Jacobiano 𝑱, quedando:
[
𝑥̇
𝑦̇
] = 𝑱𝒒̇
𝑱 = [
𝜕𝑓1
𝜕𝑞1
𝜕𝑓1
𝜕𝑞2
𝜕𝑓2
𝜕𝑞1
𝜕𝑓2
𝜕𝑞2
] (5.2)](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-9-320.jpg)
![9
Aunque en un caso más general:
𝑱 =
[
𝜕𝑓1
𝜕𝑞1
⋯
𝜕𝑓1
𝜕𝑞 𝑛
⋮ ⋱ ⋮
𝜕𝑓𝑛
𝜕𝑞1
⋯
𝜕𝑓𝑛
𝜕𝑞 𝑛]
Donde se incluyen variables en un espacio tridimensional como son las coordenadas
cartesianas y los ángulos de Euler del marco asociado al efector final, que proporcionan,
en suma, las velocidades lineales y angulares de éste.
También a partir del Jacobiano, es posible relacionar las aceleraciones articulares y las
del efector.
Si se deriva
[
𝑥̇
𝑦̇
] = 𝑱𝒒̇
De acuerdo a la regla del producto, obtenemos:
[
𝑥̇
𝑦̇
] = [
𝑑
𝑑𝑡
𝑱(𝑞)] 𝒒̇ + 𝑱(𝑞)𝒒̈ (5.2.1)
5.2 Cinemática inversa
Este tema se preocupa por establecer ecuaciones que permitan ir desde el espacio del
efector hacia el espacio articular del robot.
En el robot que se analizará, el método gráfico será suficiente para completar la
cinemática inversa, ya que presenta cierta simplicidad geométrica y se pueden deducir
las relaciones únicamente con trigonometría. Dicho método consiste simplemente en
resolver los triángulos formados por los eslabones y el vector posición del extremo del
brazo, con respecto al marco base (Spong, 2004).
Para robots más complicados, en cambio, existen otras técnicas que aquí no se discuten
(Barrientos, 1996).](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-10-320.jpg)








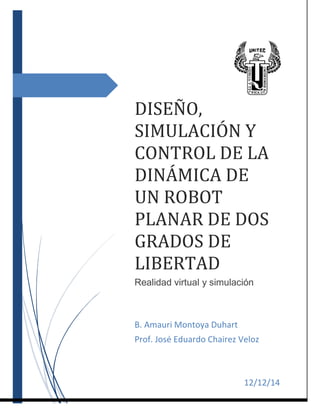
![18
Eslabón 𝜽𝒊 𝒅𝒊 𝒂𝒊 𝜶𝒊
1 𝑞1 0 𝑙1 0
2 𝑞2 0 𝑙2 0
Parámetros de D-H para el robot planar de 2 GDL
Ahora que se tienen los parámetros D-H, se sustituirán en las matrices de transformación
homogénea D-H de cada eslabón. Se tiene:
𝑨0
1
= [
𝑐1 −𝑠1 0 𝑙1 𝑐1
𝑠1 𝑐1 0 𝑙1 𝑠1
0 0 1 0
0 0 0 1
] , 𝑨1
2
= [
𝑐2 −𝑠2 0 𝑙2 𝑐2
𝑠2 𝑐2 0 𝑙2 𝑠2
0 0 1 0
0 0 0 1
]
𝑙2
𝑙1
𝑧1
𝑦1
𝑥1
𝑧0
𝑦0
𝑥0
𝑧2
𝑦2
𝑥2
𝑞1
𝑞2](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-19-320.jpg)
![19
La matriz que va del marco base al del efector final, 𝑨0
2
está definida como:
𝑨0
2
= 𝑨0
1
𝑨1
2
𝑨0
2
= [
𝑐1 𝑐2 − 𝑠1 𝑠2 −𝑐1 𝑠2 − 𝑠1 𝑐2 0 𝑙2 𝑐1 𝑐2 − 𝑙2 𝑠1 𝑠2 + 𝑙1 𝑐1
𝑠1 𝑐2 + 𝑐1 𝑠2 −𝑠1 𝑠2 + 𝑐1 𝑐2 0 𝑙2 𝑠1 𝑐2 + 𝑙2 𝑐1 𝑠2 + 𝑙1 𝑠1
0 0 1 0
0 0 0 1
]
𝑨0
2
= [
𝑐12 −𝑠12 0 𝑙2 𝑐12 + 𝑙1 𝑐1
𝑠12 𝑐12 0 𝑙2 𝑠12 + 𝑙1 𝑠1
0 0 1 0
0 0 0 1
] (6.1)
Donde 𝑠12 = sen(𝑞1 + 𝑞2) y 𝑐12 = cos(𝑞1 + 𝑞2)
A partir de las ecuaciones obtenidas arriba para 𝑥 y 𝑦, se determinará el Jacobiano del
robot.
𝑥 = 𝑓1(𝑞1, 𝑞2) = 𝑙2 𝑐12 + 𝑙1 𝑐1 (6.2)
𝑦 = 𝑓2(𝑞1, 𝑞2) = 𝑙2 𝑠12 + 𝑙1 𝑠1 (6.3)
Donde 𝑓1 y 𝑓2 corresponden a 𝑨0
2(4, 1) y 𝑨0
2(4, 2), respectivamente.
Empleando (5.2), se obtiene que:
𝑱 = [
−𝑙2 𝑠12 − 𝑙1 𝑠1 −𝑙2 𝑠12
𝑙2 𝑐12 + 𝑙1 𝑐1 𝑙2 𝑐12
] (6.4)
[
𝑥̇
𝑦̇
] = [
−𝑙2 𝑠12 − 𝑙1 𝑠1 −𝑙2 𝑠12
𝑙2 𝑐12 + 𝑙1 𝑐1 𝑙2 𝑐12
] 𝒒̇
Ahora se establecerán las aceleraciones a partir de (5.2.1).
[
𝑥̇
𝑦̇
] = [
−𝑙2 𝑐12(𝑞̇1 + 𝑞̇2) − 𝑙1 𝑐1 𝑞̇1 −𝑙2 𝑐12(𝑞̇1 + 𝑞̇2)
−𝑙2 𝑠12(𝑞̇1 + 𝑞̇2) − 𝑙1 𝑠1 𝑞̇1 −𝑙2 𝑠12(𝑞̇1 + 𝑞̇2)
] 𝒒̇ + [
−𝑙2 𝑠12 − 𝑙1 𝑠1 −𝑙2 𝑠12
𝑙2 𝑐12 + 𝑙1 𝑐1 𝑙2 𝑐12
] 𝒒̈](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-20-320.jpg)


![22
acos 𝑧 =
𝜋
2
− ∑
(
2𝑛
𝑛
) 𝑧2𝑛+1
4 𝑛(2𝑛 + 1)
∞
𝑛=0
; |𝑧| ≤ 1
atan 𝑧 = ∑
(−1) 𝑛
𝑧2𝑛+1
2𝑛 + 1
∞
𝑛=0
; |𝑧| ≤ 1
Específicamente, se emplea 𝑎𝑡𝑎𝑛2, ya que ésta tiene un rango de salida [−𝜋, 𝜋], mientras
que 𝑎𝑡𝑎𝑛 tiene un rango recortado [−
𝜋
2
,
𝜋
2
] que limitaría el movimiento del brazo.
6.3 Espacio de trabajo, singularidades e índice de manipulabilidad
En el caso del robot que estamos tratando, el espacio de trabajo se infiere de manera
empírica como el área contenida dentro de dos círculos que representan el mínimo
alcance y máximo alcance del robot. De esta manera el espacio de trabajo del robot
quedará descrito como:
𝑊 = {(𝑥, 𝑦)|(𝑙1 − 𝑙2)2
≤ 𝑥2
+ 𝑦2
≤ (𝑙1 + 𝑙2)2}
En el caso de las singularidades, se calcula el determinante del Jacobiano. El rango del
Jacobiano decrecerá siempre que el su determinante sea nulo.
det 𝑱 = det [
−𝑙2 𝑠12 − 𝑙1 𝑠1 −𝑙2 𝑠12
𝑙2 𝑐12 + 𝑙1 𝑐1 𝑙2 𝑐12
]
det 𝑱 = 𝑙2 𝑐12( − 𝑙2 𝑠12 − 𝑙1 𝑠1) + 𝑙2 𝑠12(𝑙2 𝑐12 + 𝑙1 𝑐1)
det 𝑱 = 𝑙1 𝑙2 𝑠2
det 𝑱 = 0 ⇔ 𝑠2 = 0
Entonces habrá una singularidad siempre que:
𝑞2 = 𝑛𝜋, 𝑛 = ±1, ±2, …
En cuanto al índice de manipulabilidad,
𝜔 = │ det 𝑱 │ = 𝑙1 𝑙2│𝑠2│](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-23-320.jpg)

![24
Primer eslabón
Energía cinética
𝑥1 = 𝑙1 𝑐1
𝑦1 = 𝑙1 𝑠1
𝑣1 = [
𝑥̇
𝑦̇
] = [
−𝑙1 𝑠1
𝑙1
̅ 𝑐1
] 𝑞̇1
𝑣1
𝑇
𝑣1 = [−𝑙1 𝑠1 𝑙1 𝑐1] 𝑞̇1 [
−𝑙1 𝑠1
𝑙1 𝑐1
] 𝑞̇1
‖𝑣1‖ = 𝑙1
2
𝑠1
2
𝑞̇1
2
+ 𝑙1
2
𝑐1
2
𝑞̇1
2
Mediante la identidad pitagórica:
‖𝑣1‖ = 𝑙1
2
𝑞̇1
2
Se sustituye este resultado en (2):
𝐾1 =
1
2
𝑚1 𝑙1
2
𝑞̇1
2
+
1
2
𝐼1 𝑞̇1
2
Energía potencial
𝑈1 = 𝑚1 𝑔𝑙1 𝑠1
Segundo eslabón
Energía cinética
𝑥2 = 𝑙1 𝑐1 + 𝑙2 𝑐12
𝑦2 = 𝑙1 𝑠1 + 𝑙2 𝑠12
𝑣2 = [
−𝑙1 𝑠1 𝑞̇1 − 𝑙2 𝑠12(𝑞̇1 + 𝑞̇2)
𝑙1 𝑐1 𝑞̇1 + 𝑙2 𝑐12(𝑞̇1 + 𝑞̇2)
]
‖𝑣2‖ = (−𝑙1 𝑠1 𝑞̇1 − 𝑙2 𝑠12(𝑞̇1 + 𝑞̇2))
2
+ (𝑙1 𝑐1 𝑞̇1 + 𝑙2 𝑐12(𝑞̇1 + 𝑞̇2))
2](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-25-320.jpg)



![28
𝑑
𝑑𝑡
(
𝜕𝐾1
𝜕𝑞̇2
+
𝜕𝐾2
𝜕𝑞̇2
) −
𝜕𝐾1
𝜕𝑞2
−
𝜕𝐾2
𝜕𝑞2
+
𝜕𝑈1
𝜕𝑞2
+
𝜕𝑈2
𝜕𝑞2
= 𝜏2
𝑑
𝑑𝑡
(0 + (𝑚2 𝑙1 𝑙2 𝑐2 + 𝑚2 𝑙2
2
+ 𝐼2) 𝑞̇1 + (𝑚2 𝑙2
2
+ 𝐼2) 𝑞̇2) − 0 − (−𝑚2 𝑙1 𝑙2 𝑠2(𝑞̇1
2
+ 𝑞̇1 𝑞̇2))
+0 + 𝑚2 𝑔𝑙2 𝑐12 = 𝜏2
(−𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇2) 𝑞̇1 + (𝑚2 𝑙1 𝑙2 𝑐2 + 𝑚2 𝑙2
2
+ 𝐼2) 𝑞̈1 + (𝑚2 𝑙2
2
+ 𝐼2) 𝑞̈2 + 𝑚2 𝑙1 𝑙2 𝑠2(𝑞̇1
2
+ 𝑞̇1 𝑞̇2)
+𝑚2 𝑔𝑙2 𝑐12 = 𝜏2
(𝑚2 𝑙1 𝑙2 𝑐2 + 𝑚2 𝑙2
2
+ 𝐼2) 𝑞̈1 + (𝑚2 𝑙2
2
+ 𝐼2) 𝑞̈2 + (−𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇2) 𝑞̇1 + 𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇1(𝑞̇1 + 𝑞̇2)
+𝑚2 𝑔𝑙2 𝑐12 = 𝜏2
Reagrupando términos llegamos a:
(𝑚2 𝑙1 𝑙2 𝑐2 + 𝑚2 𝑙2
2
+ 𝐼2) 𝑞̈1 + (𝑚2 𝑙2
2
+ 𝐼2) 𝑞̈2 + (𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇1) 𝑞̇1 + (𝑚2 𝑙2 𝑐12)𝑔 = 𝜏2
Sin embargo, en el marco teórico se mencionó que es más útil escribir la dinámica de
acuerdo con (5.10). Entonces se procede a sustituir las expresiones anteriores en dicha
ecuación matricial.
𝑴(𝒒)𝒒̈ + 𝑪(𝒒, 𝒒̇ )𝒒̇ + 𝑮(𝒒) = 𝝉
𝑴 = [
𝑚1 𝑙1
2
+ 𝑚2 (𝑙1
2
+ 2𝑙1 𝑙2 𝑐2 + 𝑙2
2
) + 𝐼1 + 𝐼2 𝑚2 (𝑙1 𝑙2 𝑐2 + 𝑙2
2
) + 𝐼2
𝑚2 (𝑙1 𝑙2 𝑐2 + 𝑙2
2
) + 𝐼2 𝑚2 𝑙2
2
+ 𝐼2
]
𝑪 = [
−2𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇2 −𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇2
𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇1 0
]
𝑮 = 𝑔 [
(𝑚1 𝑙1 + 𝑚2 𝑙1)𝑐1 + 𝑚2 𝑙2 𝑐12
𝑚2 𝑙2 𝑐12
]
𝒒̈ = [
𝑞̈1
𝑞̈2
] , 𝒒̇ = [
𝑞̇1
𝑞̇2
] , 𝝉 = [
𝜏1
𝜏2
]](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-29-320.jpg)
![29
6.5 Cambios
Antes de continuar con el análisis, se resumen a continuación algunas de las ecuaciones
obtenidas hasta ahora. La importancia de ellas radica en que conforman el modelo del
comportamiento del sistema, sin dichas ecuaciones, no podría simularse el manipulador.
Cinemática directa
[
𝑥
𝑦] = [
𝑙2 𝑐12 + 𝑙1 𝑐1
𝑙2 𝑠12 + 𝑙1 𝑠1
]
Cinemática inversa
[
𝑞1
𝑞2
] =
[
𝑎𝑡𝑎𝑛
𝑦
𝑥
− 𝑎𝑡𝑎𝑛
𝑙2 𝑠2
𝑙1 + 𝑙2 𝑐2
𝑎𝑡𝑎𝑛
±√1 − 𝑐2
2
𝑐2 ]
𝑐2 =
𝑥2
+ 𝑦2
− 𝑙1
2
− 𝑙2
2
2𝑙1 𝑙2
Jacobiano
𝑱 = [
−𝑙2 𝑠12 − 𝑙1 𝑠1 −𝑙2 𝑠12
𝑙2 𝑐12 + 𝑙1 𝑐1 𝑙2 𝑐12
]
Índice de manipulabilidad
𝜔 = │ 𝑑𝑒𝑡 𝑱 │ = 𝑙1 𝑙2│𝑠2│](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-30-320.jpg)
![30
Dinámica
𝑴(𝒒)𝒒̈ + 𝑪(𝒒, 𝒒̇ )𝒒̇ + 𝑮(𝒒) = 𝝉
𝑴 = [
𝑚1 𝑙1
2
+ 𝑚2 (𝑙1
2
+ 2𝑙1 𝑙2 𝑐2 + 𝑙2
2
) + 𝐼1 + 𝐼2 𝑚2 (𝑙1 𝑙2 𝑐2 + 𝑙2
2
) + 𝐼2
𝑚2 (𝑙1 𝑙2 𝑐2 + 𝑙2
2
) + 𝐼2 𝑚2 𝑙2
2
+ 𝐼2
]
𝑪 = [
−2𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇2 −𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇2
𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇1 0
]
𝑮 = 𝑔 [
(𝑚1 𝑙1 + 𝑚2 𝑙1)𝑐1 + 𝑚2 𝑙2 𝑐12
𝑚2 𝑙2 𝑐12
]
𝒒̈ = [
𝑞̈1
𝑞̈2
] , 𝒒̇ = [
𝑞̇1
𝑞̇2
] , 𝝉 = [
𝜏1
𝜏2
]
Sin embargo, éstas se obtuvieron refiriendo el ángulo 𝑞1 a partir del semieje 𝑥0 positivo.
En cambio, para poder modelar el comportamiento de nuestro manipulador desde una
posición de equilibrio en el semieje negativo 𝑦, debe aplicarse un cambio de variable,
sustituyendo 𝑞1 por 𝑞1 −
𝜋
2
Tomando en cuenta este cambio de variable, junto con las identidades trigonométricas
sen (𝜃 −
𝜋
2
) = − cos 𝜃 y cos (𝜃 −
𝜋
2
) = sen 𝜃, se redefinen las ecuaciones anteriores. Estas
nuevas definiciones serán las que se utilicen durante la parte restante del trabajo.
Cinemática directa
[
𝑥
𝑦] = [
𝑙2 𝑠12 + 𝑙1 𝑠1
−𝑙2 𝑐12 − 𝑙1 𝑐1
]](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-31-320.jpg)
![31
Cinemática inversa
[
𝑞1
𝑞2
] =
[
𝑎𝑡𝑎𝑛
𝑦
𝑥
− 𝑎𝑡𝑎𝑛
𝑙2 𝑠2
𝑙1 + 𝑙2 𝑐2
+
𝜋
2
𝑎𝑡𝑎𝑛
±√1 − 𝑐2
2
𝑐2 ]
𝑐2 =
𝑥2
+ 𝑦2
− 𝑙1
2
− 𝑙2
2
2𝑙1 𝑙2
Jacobiano
𝑱 = [
𝑙2 𝑐12 + 𝑙1 𝑐1 𝑙2 𝑐12
𝑙2 𝑠12 + 𝑙1 𝑠1 𝑙2 𝑠12
]
Índice de manipulabilidad
𝜔 = │ 𝑑𝑒𝑡 𝑱 │ = 𝑙1 𝑙2│𝑠2│
Esta ecuación permanece intacta, pues el determinante del Jacobiano original no se ve
alterado por la redefinición (det 𝑱 = 𝑙2 𝑠12(𝑙2 𝑐12 + 𝑙1 𝑐1) − 𝑙2 𝑐12(𝑙2 𝑠12 + 𝑙1 𝑠1 ) = 𝑙1 𝑙2 𝑠2)
Dinámica
𝑴 = [
𝑚1 𝑙1
2
+ 𝑚2 (𝑙1
2
+ 2𝑙1 𝑙2 𝑐2 + 𝑙2
2
) + 𝐼1 + 𝐼2 𝑚2 (𝑙1 𝑙2 𝑐2 + 𝑙2
2
) + 𝐼2
𝑚2 (𝑙1 𝑙2 𝑐2 + 𝑙2
2
) + 𝐼2 𝑚2 𝑙2
2
+ 𝐼2
]
𝑪 = [
−2𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇2 −𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇2
𝑚2 𝑙1 𝑙2 𝑠2 𝑞̇1 0
]
𝑮 = 𝑔 [
(𝑚1 𝑙1 + 𝑚2 𝑙1)𝑠1 + 𝑚2 𝑙2 𝑠12
𝑚2 𝑙2 𝑠12
]](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-32-320.jpg)
![32
6.6 Control
En esta sección se presentan las leyes de control aplicadas al sistema. Como se planteó
en el marco teórico, dos leyes de control serán implementadas: Control con
compensación de gravedad y Control por modos deslizantes.
Control con compensación de gravedad
Se mencionó en la parte del marco teórico que el control por compensación de gravedad
se expresa mediante la siguiente ecuación:
𝑢 = 𝑘 𝑃 𝑒 + 𝑘 𝐷
𝑑
𝑑𝑡
𝑒 + 𝑔(𝑞1, 𝑞2, … 𝑞 𝑚)
Llevando esto a un espacio ℝ2
y considerando la parte resuelta en la dinámica, se escribe
que:
𝒖 = 𝒌 𝑷 𝒆 + 𝒌 𝑫
𝑑
𝑑𝑡
𝒆 + 𝒈(𝑞1, 𝑞2, … 𝑞 𝑚)
𝒖 = [
𝑢1
𝑢2
]
𝒆 = [
𝑞 𝑑1 − 𝑞1
𝑞 𝑑2 − 𝑞2
]
𝒌 𝑷 = [
𝑘 𝑃1 0
0 𝑘 𝑃2
]
𝒌 𝑫 = [
𝑘 𝐷1 0
0 𝑘 𝐷2
]
𝒈 = 𝑔 [
(𝑚1 𝑙1 + 𝑚2 𝑙1)𝑠1 + 𝑚2 𝑙2 𝑠12
𝑚2 𝑙2 𝑠12
]
Mediante prueba y error, se sintonizaron las ganancias de este control en
𝑘 𝑃1 = 800, 𝑘 𝑃2 = 540, 𝑘 𝐷1 = 1200, 𝑘 𝐷2 = 600](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-33-320.jpg)
![33
Control por modos deslizantes
Como anteriormente se había presentado, aquí se empleará la función tangente
hiperbólica como ley de control para nuestro sistema, tomando como superficie
deslizante la porción PD del control con compensación de gravedad. Traduciendo esto a
una expresión matemática también en ℝ2
:
𝒖 = 𝒌 𝑡𝑎𝑛ℎ (𝒌 𝑷 𝒆 + 𝒌 𝑫
𝑑
𝑑𝑡
𝒆)
Donde 𝒖, 𝒌 𝑷, 𝒌 𝑫 y 𝒆 se definen igual que antes y
𝒌 = [
𝑘1 0
0 𝑘2
]
También empíricamente se sintonizaron las ganancias. Los valores elegidos fueron:
𝑘1 = 200, 𝑘2 = 50
6.7 Simulación
Lo que aquí se discute corresponde al diseño CAD del manipulador mecánico,
incluyendo el establecimiento de los parámetros geométricos del mismo y la generación
del archivo VRML a partir de éste, así como la conexión del elemento virtual con el
modelo matemático producido en Simulink®.
Para el diseño del brazo, se tomaron como base los modelos CAD que la compañía
coreana Robotis incorpora en su software específico para el robot Bioloid Premium,
Roboplus.
A partir de los modelos de las piezas individuales, se diseñó el siguiente manipulador.](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-34-320.jpg)

















![51
9.Referencias
[1] Barrientos. (1996). Fundamentos de robótica. Madrid.
[2] Beer, F., & Johnston, R. (s.f.). Mecánica vectorial para ingenieros: Dinámica.
McGraw Hill.
[3] Contreras Montes, J. A. (s.f.). Teoría PID. Obtenido de Autómatas:
http://www.automatas.org/hardware/teoria_pid.htm
[4] Duarte, O. (s.f.). Análisis de sistemas dinámicos. Obtenido de Universidad
nacional de Colombia:
http://www.virtual.unal.edu.co/cursos/ingenieria/2001619/lecciones/estado/node4
.html
[5] González Elías, M., & Díaz Domínguez, D. (2005). Control de un Robot
Manipulador de dos Grados de Libertad Aplicando la Técnica Adaptable de
Slotine-Li. Obtenido de Universidad Autónoma de Zacatecas:
http://www.google.com.mx/url?sa=t&rct=j&q=&esrc=s&frm=1&source=web&cd=1
&ved=0CBsQFjAA&url=http%3A%2F%2Fwww.uaz.edu.mx%2Fcippublicaciones
%2Feninvie2K5%2FRO_1%255CRO_1Gonzale.pdf&ei=GFBJVMOjD8q68QHxlY
CACQ&usg=AFQjCNEEo0P0iVDhoB3rVkeH0MiSLaA2IQ&sig2=NYMw45yl
[6] Inverse trigonometric functions. (s.f.). Obtenido de Wikipedia:
http://en.wikipedia.org/wiki/Inverse_trigonometric_functions
[7] Khaled, N. (s.f.). Virtual reality and animation for Matlab and Simulink users .
Springer.
[8] Spong, M. (2004). Robot dynamics and control.
[9] University of Michigan. (s.f.). Introduction. Obtenido de Control tutorials for Matlab
& Simulink: http://ctms.engin.umich.edu/CTMS/index.php?aux=Home](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-52-320.jpg)

![53
1.1
1.2
function q_d = fcn(x, y)
l1 = 68;
l2 = 125;
c2 = (x^2 + y^2 - l1^2 - l2^2)/(2*l1*l2);
q2 = atan2(real(sqrt(complex(1-c2^2))), c2);
q1 = atan2(y, x) - atan2(l2*sin(q2),(l1+l2*cos(q2))) + pi/2;
q_d = [q1; q2];
2
2.1
2.2
2.3](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-54-320.jpg)

![55
2.2
2.3
function q_ddot = fcn(q, q_dot, tau)
m1 = 55e-3;
m2 = 10e-3;
l1 = 68;
l2 = 125;
lc1 = 40;
lc2 = 62.5;
I1 = 89.4667;
I2 = 52.937;
g = 9.81;
m11 = m1*lc1^2 + m2*(l1^2 + 2*l1*lc2*cos(q(2)) + lc2^2) + I1 + I2;
m12 = m2*(l1*lc2*cos(q(2,1)) + lc2^2) + I2;
m21 = m2*(l1*lc2*cos(q(2,1)) + lc2^2) + I2;
m22 = m2*lc2^2 + I2;
c11 = -2*m2*l1*lc2*sin(q(2))*q_dot(2);
c12 = -m2*l1*lc2*sin(q(2))*q_dot(2);
c21 = m2*l1*lc2*sin(q(2))*q_dot(1);
c22 = 0;
%Se sustituyen cosenos por senos:
%cos(x - pi/2) = sin(x)
g11 = (m1*lc1 + m2*l1)*sin(q(1)) + m2*lc2*sin(q(1)+ q(2));
g21 = m2*lc2*sin(q(1)+ q(2));
M = [m11 m12; m21 m22];
C = [c11 c12; c21 c22];
G = g*[g11; g21];
q_ddot = inv(M)*(tau - C*q_dot - G);](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-56-320.jpg)
![56
3
3.1
function [out, rankJ] = fcn(q)
l1 = 68;
l2 = 125;
xOut = l1*sin(q(1)) + l2*sin(q(1) + q(2));
yOut = -l1*cos(q(1)) - l2*cos(q(1) + q(2));
zOut = 0;
out = [xOut; yOut; zOut];
J11 = l1*cos(q(1)) + l2*cos(q(1) + q(2));
J12 = l2*cos(q(1) + q(2));
J21 = l1*sin(q(1)) + l2*sin(q(1) + q(2));
J22 = l2*sin(q(1) + q(2));
J = [J11 J12; J21 J22];
rankJ = rank(J);
3.1](https://image.slidesharecdn.com/proyecto-150929195232-lva1-app6891/85/Diseno-simulacion-y-control-de-la-dinamica-de-un-robot-planar-de-dos-grados-de-libertad-documento-57-320.jpg)




El documento presenta un método para la simulación de un manipulador robótico planar de dos grados de libertad, enfocado en el modelado matemático de su movimiento y fuerzas para un análisis comprensible de su comportamiento. Se abordan temas de cinemática directa e inversa, dinámica, control y su implementación en ambientes virtuales utilizando herramientas como Simulink y MATLAB. El objetivo final es optimizar las leyes de control y mejorar la visualización del modelo en entornos virtuales 3D.
































































