Descargar como PDF, PPTX
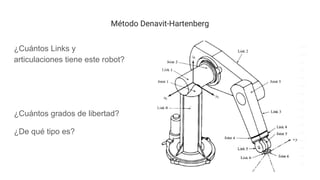



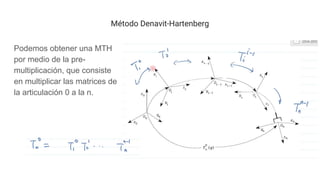


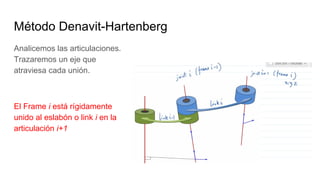





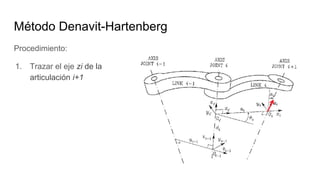







El método Denavit-Hartenberg se utiliza para asignar sistemas de coordenadas a las articulaciones de un robot, facilitando el análisis de su cinemática. Cada articulación se describe mediante matrices de transformación homogénea, relacionadas mediante cuatro parámetros que definen la posición y orientación de los links adyacentes. El procedimiento para asignar los ejes incluye trazar y ubicar ejes en relación con las articulaciones, siguiendo ciertas reglas de perpendicularidad y alineación.

















































