Descargado 99 veces








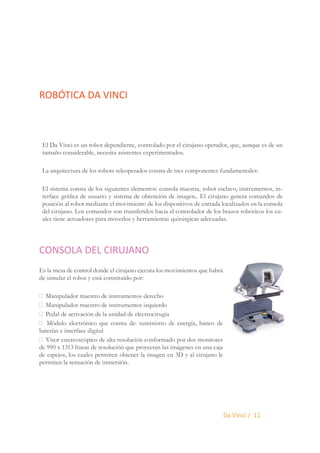






Este documento describe el sistema quirúrgico robótico Da Vinci, el cual permite realizar cirugías mínimamente invasivas. Explica que el sistema consiste en una consola para el cirujano, brazos robóticos con instrumentos quirúrgicos y una cámara de alta definición que proporciona una visión en 3D. Los beneficios incluyen una recuperación más rápida para el paciente, mayor precisión quirúrgica y una mejor ergonomía para el médico. El documento también analiza casos exitosos del sistema

















































































