Descargado 235 veces


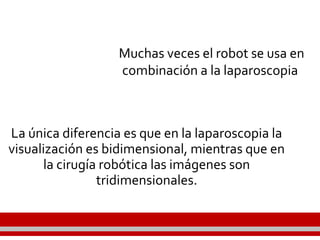
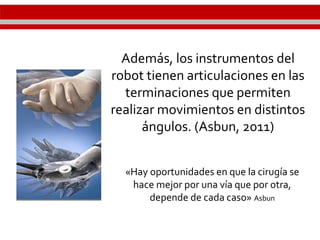
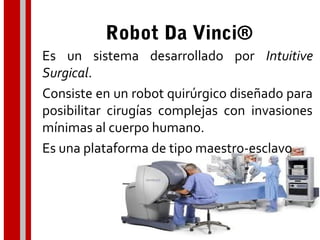


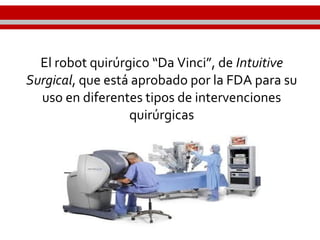

La cirugía robótica es una técnica médica mínimamente invasiva que utiliza robots controlados por cirujanos para realizar intervenciones quirúrgicas con mayor precisión y visualización tridimensional. Aunque ofrece ventajas significativas para los pacientes y cirujanos, como una recuperación más rápida, su alto costo y limitaciones táctiles son desventajas importantes. El sistema más conocido es el 'da Vinci', que ha sido aprobado por la FDA para diversas cirugías.










































































