Descargar para leer sin conexión

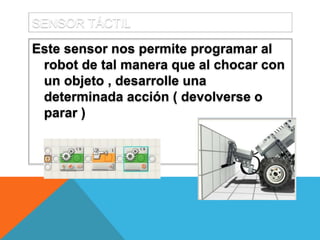
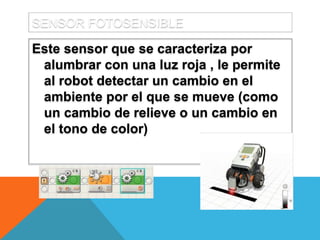

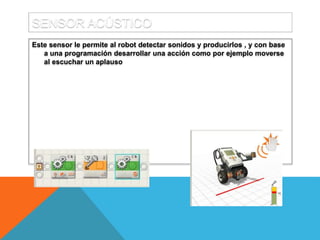
El documento describe cuatro sensores que permiten a un robot percibir su entorno y responder a estímulos: el sensor táctil permite que el robot desarrolle acciones como retroceder al chocar con un objeto, el sensor fotosensible detecta cambios en el ambiente, el sensor ultrasónico detecta objetos cercanos y lejanos, y el sensor acústico permite que el robot detecte sonidos y produzca sonidos en respuesta a una programación.





















































































