El documento describe diferentes sensores que se pueden usar con LEGO MINDSTORMS NXT, incluyendo sensores táctiles, acústicos, fotosensibles y ultrasónicos. Explica cómo cada sensor puede usarse para detectar estímulos como sonidos, luz y distancias, y cómo esto puede programarse para que un robot cambie su comportamiento.


![Sensor Acústico.
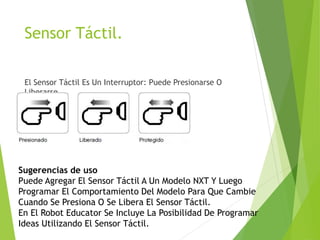
Sugerencias De Uso
Puede Agregar El Sensor Acústico A Un Modelo NXT Y
Luego
Programar El Comportamiento Del Modelo Para Que
Cambie
Cuando Se Activa El Sensor Acústico.
En El Robot Educator Se Incluye La Posibilidad De
Programar
Ideas Utilizando El Sensor Acústico.
Seleccione Ver [View] en la pantalla
del NXT.
Seleccione el icono Sonido dB.
Seleccione el puerto 2.
Haga sonidos en el micrófono (sensor
acústico) y observe las lecturas
en el NXT. Pruebe también obtener la
lectura de los sonidos a su
alrededor: ¿Qué tan fuertes son las voces
más cercanas?](https://image.slidesharecdn.com/legomindstormnxt1-150602001449-lva1-app6891/85/Lego-mindstorm-nxt-4-320.jpg)






































![[IJET-V2I4P11] Authors: Rekha Dhanai, R.S. Negi and Santosh Singh](https://cdn.slidesharecdn.com/ss_thumbnails/ijet-v2i4p11-161103102026-thumbnail.jpg?width=640&height=640&fit=bounds)
































































