Descargado 58 veces







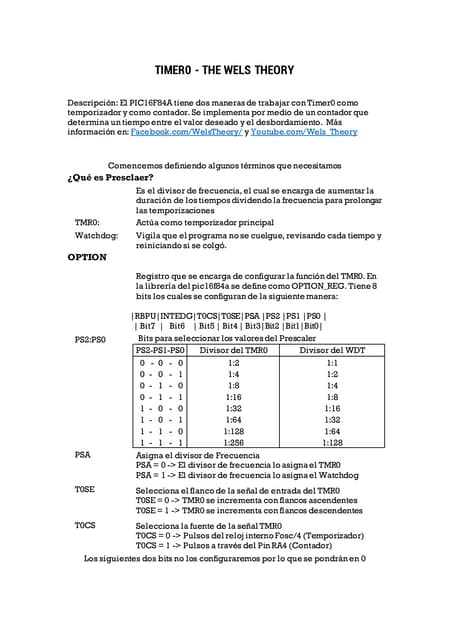
Este documento describe cómo generar ondas cuadradas de 10 kHz utilizando interrupciones por desbordamiento del temporizador TMR0 en un microcontrolador PIC. Explica cómo configurar el TMR0 y el registro INTCON para habilitar las interrupciones y cómo usar una subrutina de interrupción para alternar el estado de una salida cada 50 microsegundos. También cubre cómo ajustar el valor de carga del TMR0 para lograr temporizaciones exactas de 50 microsegundos teniendo en cuenta los tiempos de ejecución de instrucciones. El documento incluye có