Este documento trata sobre la interpolación polinómica, un método de interpolación numérica que aproxima un conjunto de datos por un polinomio. Explica que dado un número de puntos muestrales, se busca un polinomio que pase por todos los puntos. Describe formas de representar el polinomio de interpolación, incluyendo la forma de Lagrange que utiliza coeficientes de Lagrange.



![Interpolación lineal
x=[0 1 2 3 4 5 6];
Y=[0 0.9 1 0.2 -0.9 -1 -0.3];
Encontrar Y(1.5)](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-5-320.jpg)





![La solución de estas 2 ecuaciones, nos da los
valores de ao , a1
A=[1 12 18;1 14 21];
Sol=rref(A)
Ejecutando
Sol =[1.00 0.00 0.00
0.00 1.00 1.50]
Equivale ao =0, a1=1.5
Y=0 +1.5x
Y(13)=1.5(13)=19.5](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-11-320.jpg)


![Ej1.- Dados (1,1), (3,6), (5,1). Hallar f(4)
X=[1, 3, 5]; Y=[1, 6, 1];plot(X,Y);grid;
P(x)=a+bx + cx2
a +b + c = 1
a +3b+9c=6
a+5b+25c=1
A=[1 1 1 1;1 3 9 6;1 5 25 1];abc=rref(A)
Ejecutando en octave, se obtiene
abc = 1.00 0.00 0.00 -5.25
0.00 1.00 0.00 7.50
0.00 0.00 1.00 -1.25
Es decir: a=-5.25; b=7.5; c=-1.25;
Y(4) = y4=a+b*4+c*16
y4 = 4.75](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-14-320.jpg)

![Ej2. Interpolación polinomial
Dados x=[0 1 2 3 4 5 6];
Y=[0 0.9 1 0.2 -0.9 -1 -0.3];
x1=1.5
Encontrar y(1.5)
Podemos utilizar diferentes
Alternativas: segmentario lineal entre (1,0.9)y (2,1), y(1.5)=0.95
Segmentario parabólico entre (1,0.9),(2,1),(3,0.2):P(x)=a+bx+cx2
a+b+c =0.9
a+2b+4c=1
a+3b+9c=0.2
P=1.06](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-16-320.jpg)
![Contin. Ej.2. Forma cuadrática
x=[0 1 2 3 4 5 6];
Y=[0 0.9 1 0.2 -0.9 -1 -0.3];
a=0
a+b+c =0.9
a+2b+4c=1
a+3b+9c=0.2
b+c =0.9
b+2c =0.5 -- > c=-0.4
bc=[1 1 0.9;1 2 0.5];bc=rref(bc)
b+c =0.9
b+3c =0.2/3=0.066 -- > 2c=-0.83 -- > c=-0.415
c =-0.41, b=1.31
x=1.5;P=1.31*x-0.41*x^2
y(1.5)=1.04; y(0.5)=0.55](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-17-320.jpg)
![Ej3.Interpolación forma cúbica
x=[0 1 2 3 4 5 6];
Y=[0 0.9 1 0.2 -0.9 -1 -0.3];
Encontrar y(4.5), y(5.5)
P(x) =a+bx + cx2 + dx3
Escogemos
x=[1 2 5 6];
Y=[0.9 1 -1 -0.3];
a+b+c+d=0.9
a+2b+4c+8d=1
a+5b+25c+125d=-1
a+6b+36c+216d=-0.3](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-18-320.jpg)
![Cont Ej3.Interpolación polinomial
a+b+c+d=0.9
a+2b+4c+8d=1
a+5b+25c+125d=-1
a+6b+36c+216d=-0.3
A=[1 1 1 1 0.9; 1 2 4 8 1;1 5 25 125 -1;1 6 36 216 -0.3];
A=rref(A)
A =
1.00 0.00 0.00 0.00 -0.65
0.00 1.00 0.00 0.00 2.49
0.00 0.00 1.00 0.00 -1.04
0.00 0.00 0.00 1.00 0.11
>> x=4.5;y=-0.65+2.49*x-1.04*x*x+0.11*x^3
y = -0.48](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-19-320.jpg)






![Ej. Dados x=[-3 0 1 4 6 ];y=[-8 5 -1 7 -3 ];xi=5 encontrar y(5) con el
Algoritmo de Lagrange en Octave
clc;clear;
x=[-3 0 1 4 6 ];y=[-8 5 -1 7 -3 ];LS=0;xi=5;n=5;
plot(x,y);grid;
for i=1:n
L=1;
for j=1:n
if i~=j
L=L*(xi-x(j))/(x(i)-x(j));
end
end
LS=LS+L*y(i);
end
sol=LS](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-26-320.jpg)

![Ej. Encontrar y(5.5) mediante el algoritmo de Lagrange y
ayuda del Octave
x=[0 1 2 3 4 5 6];
Y=[0 0.9 1 0.2 -0.9 -1 -0.3];
Encontrar y(4.5), y(5.5)
P(x) =a+bx + cx2 + dx3
Escogemos
x=[1 2 5 6];y=[0.9 1 -1 -0.3];
Luego se ingresan estos datos en el Programa de Octave
Y obtenemos y(5.5)= -0.83 (Lagrange)](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-28-320.jpg)











![Ej. Si x=[-3,0,1,4,6];y=[-8,5,-1, 7,-3]; encontrar y(3)
clc;clear;x=[-3,0,1,4,6];y=[-8,5,-1, 7,-3];plot(x,y);grid;
D(:,1)=y';xi=3;n=5;
for j=2:n
for k=j:n
D(k,j)=(D(k,j-1)-D(k-1,j-1))/(x(k)-x(k-j+1));
end;
end;
P=D(1,1);
for k=1:n-1
F=1;
for j=1:k
F=F*(xi-x(j));
end;
P=P+F*D(k+1,k+1);
end;
fprintf('Pd=');disp(P);](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-40-320.jpg)


![Interpolación Numérica
Problema de Hermite
Existencia y unicidad asociadas al sistema
Base polinónica: soporte sin puntos repetidos
Base trigonométrica: soporte sin puntos repetidos y
comprendidos en [- , ]
0 0 1 0 0 1 0 2 1 0 0
0 1 1 1 1 1 1 2 1 1 1
0 1 1 2 1
0 0 1 0 0 1 0 2 1 0 1
0 1 1 2 1 2 1
n n n
n n n
n n n n n n n n n
n n n n
n n n n n n n n n
x x x x x
x x x x x
x x x x x
x x x x x
x x x x x
0
1
0
n
n
f x
f x
f x
f x
f x
2 1
0
: , 0,1,
n
k k
i i
i k k
x f x
x x k n
x f x
2 3 2 1
1, , , , n
x x x x
1,sin ,cos , sin ,cos ,
x x kx kx](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-44-320.jpg)


![0
0
0 y
]
x
[
f
=
c
0
2
1
0
2
1
2
1
0
2
x
x
]
x
,
x
[
f
]
x
,
x
[
f
]
x
,
x
,
x
[
f
c
0
k
1
k
1
0
k
2
1
k
1
0
k
x
x
]
x
,
x
,
f[x
]
x
,
x
,
f[x
]
x
,
x
,
f[x
c
0
1
0
1
1
0
1
x
x
]
x
[
f
]
x
[
f
]
x
,
x
[
f
=
c
Diferencias divididas
](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-47-320.jpg)
![]
x
,
x
,
x
,
x
[
f
]
x
,
x
,
x
[
f
]
x
,
x
[
f
]
x
[
f
y
]
x
,
x
,
x
[
f
]
x
,
x
[
f
]
x
[
f
y
]
x
,
x
[
f
]
x
[
f
y
]
x
[
f
y
3
2
1
0
3
2
1
3
2
3
3
2
1
0
2
1
2
2
1
0
1
1
0
0
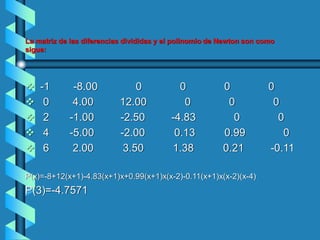
12 18
14 21 1.5000
10 12 2.2500 -0.3750
16 19 1.1667 -0.5417 -0.0417
Tabla de diferencias divididas
Ejemplo de las temperaturas](https://image.slidesharecdn.com/interpolacin-221227012707-d29ed108/85/INTERPOLACION-pdf-48-320.jpg)


















![Interpolación lagrange[1]](https://cdn.slidesharecdn.com/ss_thumbnails/interpolacin-lagrange1-131220172359-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)



















