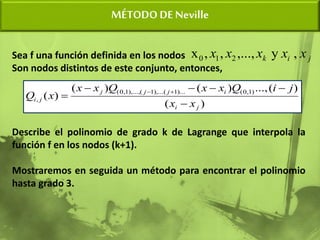
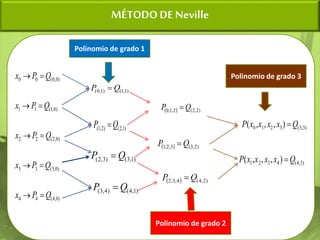
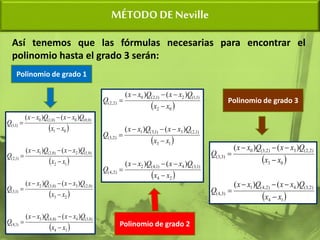
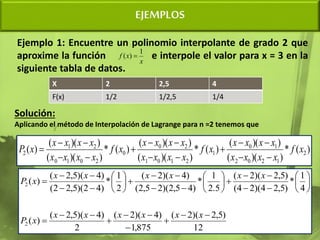
Este documento presenta tres métodos para aproximar e interpolar funciones mediante polinomios: el método de interpolación de Lagrange, el método de diferencias divididas de Newton y el método de Neville. Describe cada método y muestra ejemplos del desarrollo de polinomios de diferentes grados usando cada uno.



















![Gua calculo_integral_(momentos-centros_masa)_(autoguardado)[1]](https://cdn.slidesharecdn.com/ss_thumbnails/guacalculointegralmomentos-centrosmasaautoguardado1-111109095326-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)




![Interpolación lagrange[1]](https://cdn.slidesharecdn.com/ss_thumbnails/interpolacin-lagrange1-131220172359-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)































































