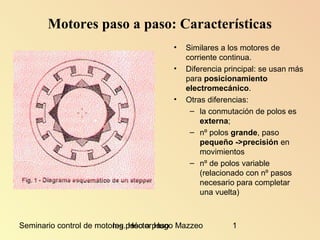
Este documento describe los motores paso a paso, incluyendo sus características principales, especificaciones, tipos, funcionamiento y formas de control. Explica que los motores paso a paso funcionan mediante la secuenciación de la energización de sus bobinas para lograr movimiento en pasos angulares precisos, y que existen diferentes tipos como de reluctancia variable, de imán permanente y híbridos. También detalla los circuitos y componentes utilizados para controlar los motores, como controladores, drivers y puentes H.