Descargado 29 veces
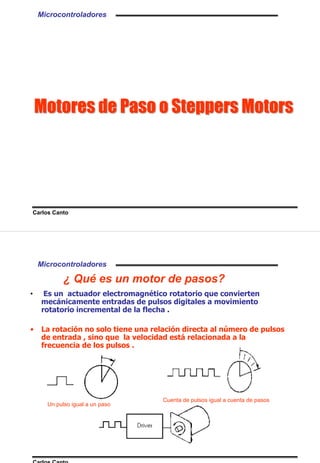





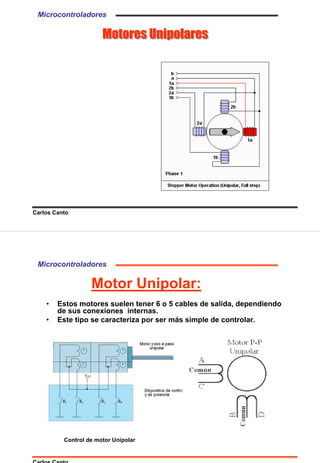




















1) Los motores de paso son actuadores electromagnéticos rotatorios que convierten entradas digitales en movimiento rotatorio incremental mediante pulsos. 2) Existen varios tipos como de reluctancia variable, imán permanente e híbridos. 3) Se controlan mediante secuencias que activan las bobinas para lograr movimientos completos, medios pasos o micropasos.









































































