Descargado 612 veces




![COEFICIENTES DE RIGIDEZ Y DE FLEXIBILIDAD
M
P
P=K·
[1]
M=K·
[3]
P 1 M 1
= ---- = ---- · P = a · P = ---- = ---- · M = a · M
K K [2] K K [4]
Si en [1] o [3] hacemos el alargamiento o giro, respectivamente, unidad:
=1 P=K
=1 M=K
RIGIDEZ
RIGIDEZ
Fuerza oopar, que aparece ante un alargamiento oogiro unitario
Fuerza par, que aparece ante un alargamiento giro unitario
Si en [2] o [4] hacemos la fuerza o momento, respectivamente, unidad:
P=1
=a M=1 =a
FLEXIBILIDAD
FLEXIBILIDAD
Alargamiento oogiro producido por una fuerza oopar unidad
Alargamiento giro producido por una fuerza par unidad](https://image.slidesharecdn.com/metododerigidez-2-110308065058-phpapp02/85/Metodo-de-rigidez-2-5-320.jpg)
![COEFICIENTES DE RIGIDEZ Y DE FLEXIBILIDAD
3 6
2 5
1 4
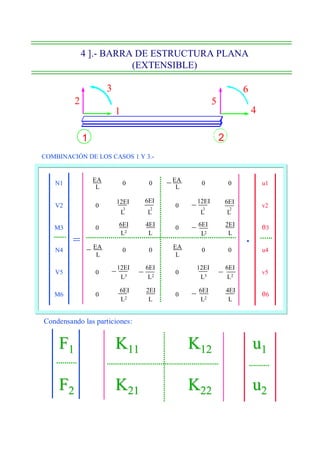
1 F=K·u K = matriz de rigidez.
2
u=A·F A = matriz de flexibilidad.
El coeficiente de rigidez, krs, que relaciona las coordenadas “r” y “s”,
es la fuerza que aparece en la coordenada “r” al dar un movimiento
exclusivo y unitario en la coordenada “s”, manteniendo nulos todos
los demás (us=1; uj=0 para j C s).
El coeficiente de flexibilidad, ars, que relaciona las coordenadas“r” y
“s”, es el movimiento que aparece en la coordenada “r” debido a una
fuerza exclusiva y unitaria en la coordenada “s”, manteniendo nulos
todos los demás (Fs=1; Fj=0 para j C s).
Fr = krs 1 # u 1 + krs 2 # u 2 + krs 3 # u 3 + ... + krs i # u i,
Matricialmente.
F1 k11 k12 k13 k14 k15 k16 u1
F2 k21 k22 k23 k24 k25 k26 u2
F3 = k31 k23 k33 k34 k35 k36 · u3
F4 k41 k42 k43 k44 k45 k46 u4
F5 k51 k52 k53 k54 k55 k56 u5
F6 k61 k62 k63 k64 k65 k66 u6
[F]=[K]·[](https://image.slidesharecdn.com/metododerigidez-2-110308065058-phpapp02/85/Metodo-de-rigidez-2-6-320.jpg)
![]](https://image.slidesharecdn.com/metododerigidez-2-110308065058-phpapp02/85/Metodo-de-rigidez-2-7-320.jpg)

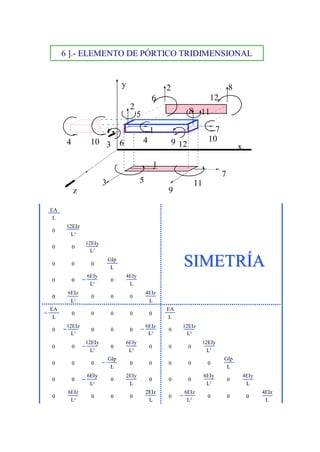
![RIGIDECES DE BARRAS ELEMENTALES
1].- BARRA DE CELOSÍA, ESTRUCTURAS PLANAS
(CERCHAS)
LF AE
LEY DE HOOCKE:](https://image.slidesharecdn.com/metododerigidez-2-110308065058-phpapp02/85/Metodo-de-rigidez-2-9-320.jpg)





![L = 1)
AE L
1 2 K
L, A
AE AE
k 11 = k 21 =
u1 = 1 u2 = 0 L L
AE AE
k 12 = k 22 =
u1 = 0 u2 = 1 L L
Generalizando para ambos nudos.
F 1 = k 11 u1 + k 12 u2
F 2 = k 21 u1 + k 22 u2
En forma matricial.
F1
AE/L - A E/L
u1
=
F2
- A E/L A E/L
u2
[F]=[K] ·[
]](https://image.slidesharecdn.com/metododerigidez-2-110308065058-phpapp02/85/Metodo-de-rigidez-2-18-320.jpg)
![2].- BARRA EN VOLADIZO
u1 = 1
v =1 3= 1
2
v=0 u=0 u=0
= 0 = 0 v=0
E·A
N = k 11 =](https://image.slidesharecdn.com/metododerigidez-2-110308065058-phpapp02/85/Metodo-de-rigidez-2-19-320.jpg)








Este documento describe el método de rigidez para el cálculo matricial de estructuras. Explica conceptos básicos como el comportamiento lineal de los materiales y movimientos pequeños. También cubre relaciones fundamentales como equilibrio y compatibilidad de movimientos. Luego, introduce la matriz de rigidez y flexibilidad, y cómo se usan para relacionar fuerzas y desplazamientos. Finalmente, detalla la discretización de la estructura y el cálculo de las rigideces de diferentes tipos de barras elementales.



































































