Modulo de mecanismos y maquinas primer periodo
•
0 recomendaciones•197 vistas

modulo completo de grado septimo

Recomendados
Más contenido relacionado
La actualidad más candente
La actualidad más candente (19)
Similar a Modulo de mecanismos y maquinas primer periodo
Similar a Modulo de mecanismos y maquinas primer periodo (20)
Último
Último (8)
Modulo de mecanismos y maquinas primer periodo
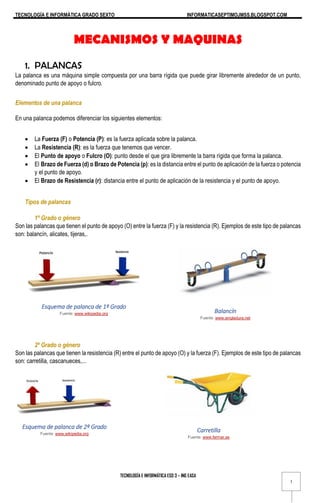
- 1. TECNOLOGÍA E INFORMÁTICA GRADO SEXTO INFORMATICASEPTIMOJMSS.BLOGSPOT.COM TECNOLOGÍA E INFORMÁTICA ESO 3 – ING EASA 1 MECANISMOS Y MAQUINAS 1. PALANCAS La palanca es una máquina simple compuesta por una barra rígida que puede girar libremente alrededor de un punto, denominado punto de apoyo o fulcro. Elementos de una palanca En una palanca podemos diferenciar los siguientes elementos: • La Fuerza (F) o Potencia (P): es la fuerza aplicada sobre la palanca. • La Resistencia (R): es la fuerza que tenemos que vencer. • El Punto de apoyo o Fulcro (O): punto desde el que gira libremente la barra rígida que forma la palanca. • El Brazo de Fuerza (d) o Brazo de Potencia (p): es la distancia entre el punto de aplicación de la fuerza o potencia y el punto de apoyo. • El Brazo de Resistencia (r): distancia entre el punto de aplicación de la resistencia y el punto de apoyo. Tipos de palancas 1º Grado o género Son las palancas que tienen el punto de apoyo (O) entre la fuerza (F) y la resistencia (R). Ejemplos de este tipo de palancas son: balancín, alicates, tijeras,. 2º Grado o género Son las palancas que tienen la resistencia (R) entre el punto de apoyo (O) y la fuerza (F). Ejemplos de este tipo de palancas son: carretilla, cascanueces,... Esquema de palanca de 2º Grado Fuente: www.wikipedia.org Esquema de palanca de 1º Grado Fuente: www.wikipedia.org Balancín Fuente: www.singladura.net Carretilla Fuente: www.fermar.es
- 2. TECNOLOGÍA E INFORMÁTICA GRADO SEXTO INFORMATICASEPTIMOJMSS.BLOGSPOT.COM TECNOLOGÍA E INFORMÁTICA ESO 3 – ING EASA 2 3º Grado o género Son las palancas que tienen la fuerza (F) entre el punto de apoyo (O) y la resistencia (R). Ejemplos de este tipo de palancas son: caña de pescar, remo de canoa, pinzas de depilar... Ley de la palanca Se dice que una palanca se encuentra en equilibrio cuando se cumple la ley de la palanca, es decir, cuando la fuerza por el brazo de la fuerza es igual a la resistencia por el brazo de la resistencia. F · d = R · r Podemos equilibrar una masa de 100 kg con otra de 5 Kg (veinte veces menor), si la situamos a una distancia del punto de apoyo veinte veces mayor. Fuente: www.wikipedia.org Además, la ley de la palanca nos puede dar más información, ya que si la palanca no se encuentra en equilibrio pueden ocurrir dos cosas: • F · d > R · r → la palanca se mueve del lado de la fuerza • F · d < R · r → la palanca se mueve del lado de la resistencia Esquema de palanca de 3º Grado Fuente: www.wikipedia.org Pinzas de barbacoa Fuente: www.leifheit.es
- 3. TECNOLOGÍA E INFORMÁTICA GRADO SEXTO INFORMATICASEPTIMOJMSS.BLOGSPOT.COM TECNOLOGÍA E INFORMÁTICA ESO 3 – ING EASA 3 2. Poleas Una polea es una máquina simple que sirve para transmitir una fuerza. Si formamos conjuntos de poleas (polea móvil o polipastos) podemos reducir la fuerza necesaria para mover un peso. A. Polea simple En las poleas fijas, la fuerza y la resistencia a ambos lados de la cuerda son iguales (F = R), por lo tanto no reduce la fuerza necesaria para levantar un cuerpo. Sin embargo permite cambiar el ángulo en el que se aplique esa fuerza y transmitirla hacia el otro lado de la cuerda. Importante: Para levantar el peso 1 m de altura, tenemos que tirar de 1 m de cuerda. Polea móvil Son aquellas donde se usan de dos poleas en el sistema, normalmente una fija y una móvil. El esfuerzo en este caso se reduce a la mitad, pero por contra tenemos que tirar del doble de cuerda. Importante: Para levantar el peso 1 m de altura, tenemos que tirar de 2 m de cuerda. Polipastos Es una combinación de poleas fijas y móviles recorridas por una sola cuerda. De esta forma se disminuye el esfuerzo en proporción directa al número de poleas y se aumenta proporcionalmente la longitud de cuerda que hay que mover. Podemos ver una comparativa de los diferentes sistemas en la siguiente imagen: Comparativa de sistemas de poleas Fuente: www.wikipedia.org Polea simple o fija Fuente: www.eudotec.wordpress.com Polea móvil o doble Fuente: www.eudotec.wordpress.com Polipasto Fuente: www.eudotec.wordpress.com
- 4. TECNOLOGÍA E INFORMÁTICA GRADO SEXTO INFORMATICASEPTIMOJMSS.BLOGSPOT.COM TECNOLOGÍA E INFORMÁTICA ESO 3 – ING EASA 4 3. PLANO INCLINADO CUÑA Y TORNILLO Plano inclinado: El plano inclinado es una trampa que sirve para elevar cargas realizando menos esfuerzos. Con la rampa los chicos pueden subir al hipopótamo haciendo menos fuerza de lo que pesa. Cuando menos inclinada esté la rampa, menor será la fuerza que tendrán que hacer, pero entonces recorrerán una distancia mayor para subir la misma altura. Si se quiere elevar una cierta altura al hipopótamo, los chicos tendrán que tirar de la cuerda con una fuerza, F, que siempre será menor que el peso, R. F = R X A/B R = peso del hipopótamo = 8000 N a = altura = 1 m b = distancia recorrida = 2 m ---> P = 8000 X 1/2 = 4000 N. Cuña: La cuña es un plano inclinado doble, donde la fuerza que se aplica perpendicular a la base se transmite multiplicado a las cosas y menor longitud tiene la base. Tornillo: El tornillo es un plano inclinado, pero enrollado sobre un cilindro. Cuando se aplica presión y se enrosca, se multiplica la fuerza aplicada. Cada filete de la rosca hace de cuña, introduciéndose en el material con poco esfuerzo.
- 5. TECNOLOGÍA E INFORMÁTICA GRADO SEXTO INFORMATICASEPTIMOJMSS.BLOGSPOT.COM TECNOLOGÍA E INFORMÁTICA ESO 3 – ING EASA 5 4. MECANISMOS DE TRANSMISIÓN DEL MOVIMIENTO Desde sus orígenes, la humanidad ha tratado de encontrar soluciones técnicas que satisficieran su necesidad de transmitir movimiento desde el lugar donde éste se generaba hasta los puntos en que se necesitaba aplicar, o de realizar grandes trabajos desarrollando pequeños esfuerzos. Así se fueron desarrollando diversas técnicas y mecanismos que cada vez eran más efectivos. Incluso alguno de ellos no ha sufrido cambios significativos con el paso del tiempo. Son los mecanismos transmisores del movimiento. Engranajes Los engranajes son piezas dentadas que transmiten el movimiento circular entre ejes cercanos mediante el empuje que ejercen los dientes de unas piezas sobre otras. El engranaje en el que se inicia el movimiento se llama engranaje de entrada o motriz y el que termina la transmisión engranaje de salida o conducido. El sentido de giro de los engranajes es contrario. Características: • Los dientes de las ruedas motriz y conducida ajustan perfectamente (engranan) por lo que nunca patinan. • Se pueden emplear para transmitir grandes potencias. • La rueda conducida gira en sentido inverso a la rueda motriz. • En función del tamaño de cada rueda dentada (número de dientes), se pueden construir sistemas de aumento o reducción de la velocidad de giro. Aplicaciones: caja de cambio de automóviles, relojería, taladros, tornos y especialmente como sistemas de reducción de velocidad de motores en máquinas, etc. Transmisión por correa: Es un mecanismo que permite transmitir un movimiento circular entre dos ejes situados a cierta distancia. Cada eje se conecta a una rueda o polea, y entre ambas se hace pasar una correa que transmite el movimiento circular por rozamiento. Características: • La transmisión por rozamiento de la correa puede patinar. El deslizamiento disminuye usando poleas en vez de ruedas. • La rueda/polea de mayor tamaño siempre gira a menor velocidad que la rueda/polea más pequeña. • Permite construir sistemas de aumento o disminución de velocidad de giro. • En función de la posición de la correa se puede conseguir que la polea conducida gire en el mismo sentido o en sentido inverso.
- 6. TECNOLOGÍA E INFORMÁTICA GRADO SEXTO INFORMATICASEPTIMOJMSS.BLOGSPOT.COM TECNOLOGÍA E INFORMÁTICA ESO 3 – ING EASA 6 Aplicaciones: lavadoras, ventiladores, lavaplatos, pulidoras, videos, cortadores de carne, taladros, generadores de electricidad, cortadoras de césped, transmisión en motores, etc. Transmisión por cadena: Se trata de un sistema de transmisión entre ejes situados a cierta distancia. Cada eje se conecta a una rueda dentada, y entre ellas se hace pasar una cadena que engrana ambas ruedas transmitiendo el movimiento circular por empuje. Características: • La transmisión se produce por empuje de la cadena sobre los dientes de las ruedas se evitan los resbalamientos. • Sólo se puede emplear para transmitir movimiento circular entre ejes paralelos. • La rueda dentada conducida gira en el mismo sentido que la rueda dentada motriz. Aplicaciones: Bicicletas, motos, puertas elevables, puertas de apertura automática (ascensores, supermercados), mecanismos internos de motores, etc. Tornillo sinfín y rueda: Se trata de un tornillo conectado al eje motriz que se engrana a una rueda dentada (corona) conectada al eje conducido. El movimiento circular se transmite del tornillo a la corona por empuje. Características: • Es un mecanismo que se usa para transmitir un movimiento circular entre ejes perpendiculares. • Es un mecanismo que proporciona una gran reducción de velocidad de giro. Aplicaciones: principalmente sistemas que requieran una gran reducción de velocidad (limpiaparabrisas de los coches, cuentakilómetros, clavijas de guitarras, reductoras para motores eléctricos, etc.).
- 7. TECNOLOGÍA E INFORMÁTICA GRADO SEXTO INFORMATICASEPTIMOJMSS.BLOGSPOT.COM TECNOLOGÍA E INFORMÁTICA ESO 3 – ING EASA 7 5. SISTEMAS DE TRANSFORMACIÓN DEL MOVIMIENTO: Los mecanismos que hemos considerado hasta ahora no modifican el tipo de movimiento; es decir, “transforman” movimientos rectilíneos en movimientos rectilíneos, o movimientos de rotación en otros movimientos de rotación. Sin embargo, en los mecanismos que vamos a describir en este apartado el movimiento de entrada es diferente al movimiento de salida. B. B.1 M. QUE TRANSFORMAN EL MOVIMIENTO CIRCULAR EN RECTILÍNEO: PIÑÓN-CREMALLERA Este sistema transforma el movimiento circular en rectilíneo por medio de dos elementos dentados: Un piñón que gira sobre su propio eje y una barra dentada denominada cremallera. Los dientes pueden ser rectos o helicoidales. Tiene diferentes aplicaciones como: taladradora de columna, la caja de dirección de un automóvil (el piñón está solidario a la barra de dirección y al volante, y los extremos de la cremallera se encargan de orientar las ruedas). TORNILLO Y TUERCA Este sistema sirve como elemento de unió n entre dos o más piezas. Pero, además posee unas características que le permiten que se pueda utilizar para transmitir el movimiento. Se compone de una varilla roscada y una pieza con un agujero roscado. Al girar la varilla, permaneciendo fija la tuerca, hace que esta última se desplace en sentido longitudinal del eje, con lo que se consigue transformar un movimiento circular uniforme en otro lineal. QUE TRANSFORMAN EL MOVIMIENTO DE ROTACIÓN EN ALTERNATIVOS: MECANISMO BIELA-MANIVELA Este mecanismo consta de dos piezas básicas articuladas entre sí y de las que recibe el nombre: la manivela y la biela La manivela OB es una pieza que gira alrededor de un punto O y describe un movimiento circular. La biela AB es una pieza rígida acoplada a la manivela en el punto B. este extremo, denominado cabeza de la biela, sigue el mismo movimiento circular que la manivela, mientras el otro extremo A, denominado pie de biela, describe un movimiento alternativo o de vaivén.
- 8. TECNOLOGÍA E INFORMÁTICA GRADO SEXTO INFORMATICASEPTIMOJMSS.BLOGSPOT.COM TECNOLOGÍA E INFORMÁTICA ESO 3 – ING EASA 8 La manivela actúa como elemento motriz y la biela, como elemento conducido. De este modo podemos transformar movimientos circulares en movimientos alternativos. CIGÜEÑAL Y BIELA El cigüeñal es un elemento que, junto a la biela, transforma el movimiento circular en alternativo o viceversa. Consiste en un árbol acodado (a) con unos muñones (m) y unas muñequillas (n) donde se colocan las bielas. Sobre cada una de las muñequillas se inserta la cabeza de una de las bielas por medio de una pieza llamada sombrerete. En este caso, la biela actúa como elemento motriz y el cigüeñal como elemento conducido. El otro extremo de la biela, denominado pie de biela, está unido al llamado émbolo, que realiza un movimiento alternativo. El émbolo y el pie de la biela están unido por una pieza denominada bulón. LEVA Y EXCÉNTRICA La leva es un disco de forma irregular sobre el que se apoya un elemento móvil denominado varilla, seguidor o vástago. Ambos elementos deben estar permanentemente en contacto. Cuando el disco gira, su movimiento circular se transforma en movimiento alternativo de la varilla, el que se intercalan períodos de reposo. La diferencia entre el punto más alto del recorrido del vástago y el más bajo recibe el nombre de carrera de la leva. El perfil del disco determina el tipo de movimiento de la leva. La excéntrica consiste básicamente en una pieza de forma geométrica diversa en la que el eje de giro no coincide con su eje geométrico. La distancia entre ambos ejes se denomina excentricidad. Cuando se sitúa una pieza rectilínea llamada vástago en contacto con la excéntrica, el movimiento circular de ésta se convierte en movimiento alternativo del vástago. La excéntrica más sencilla que se puede encontrar tiene forma de disco circular.