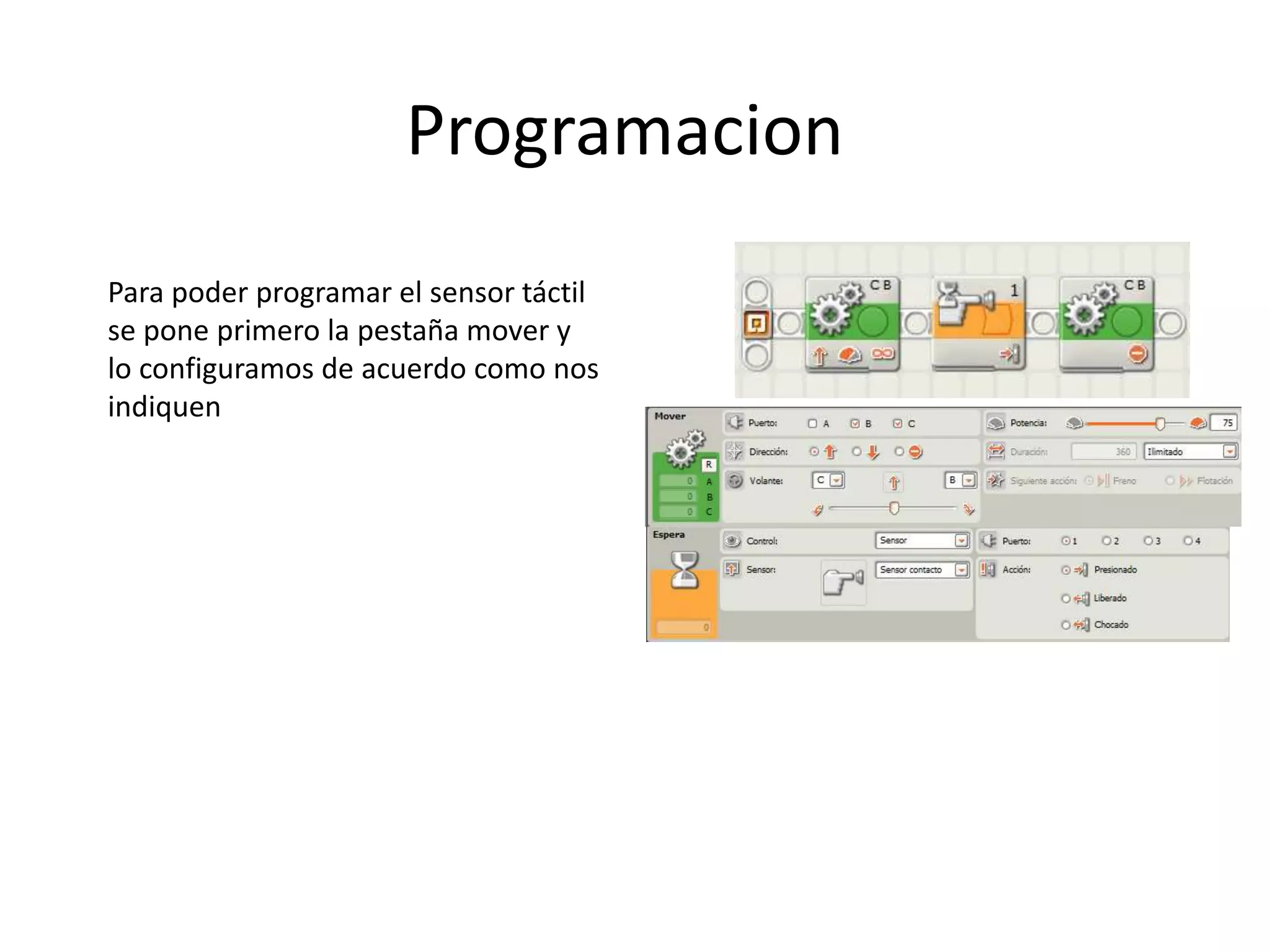
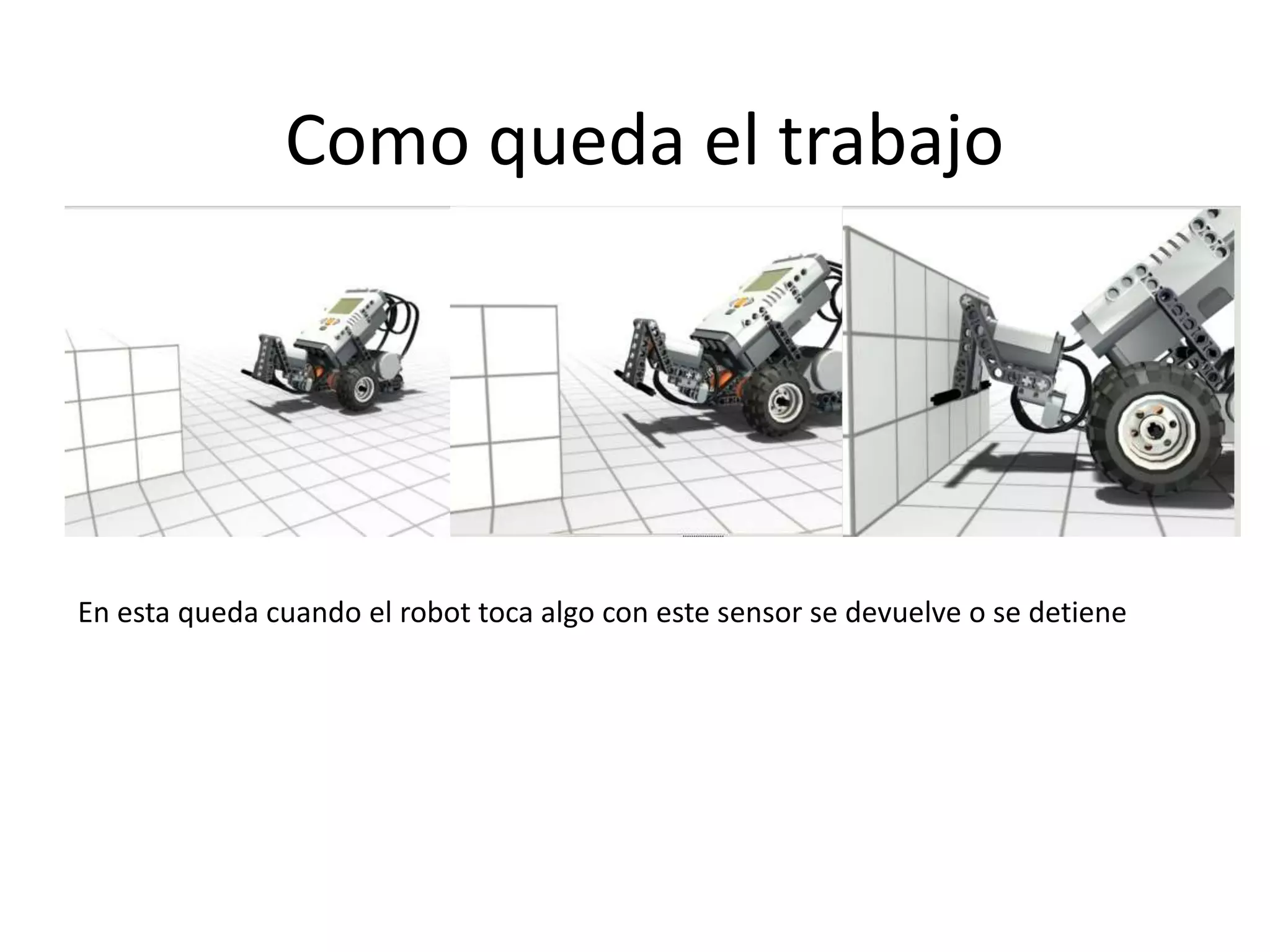
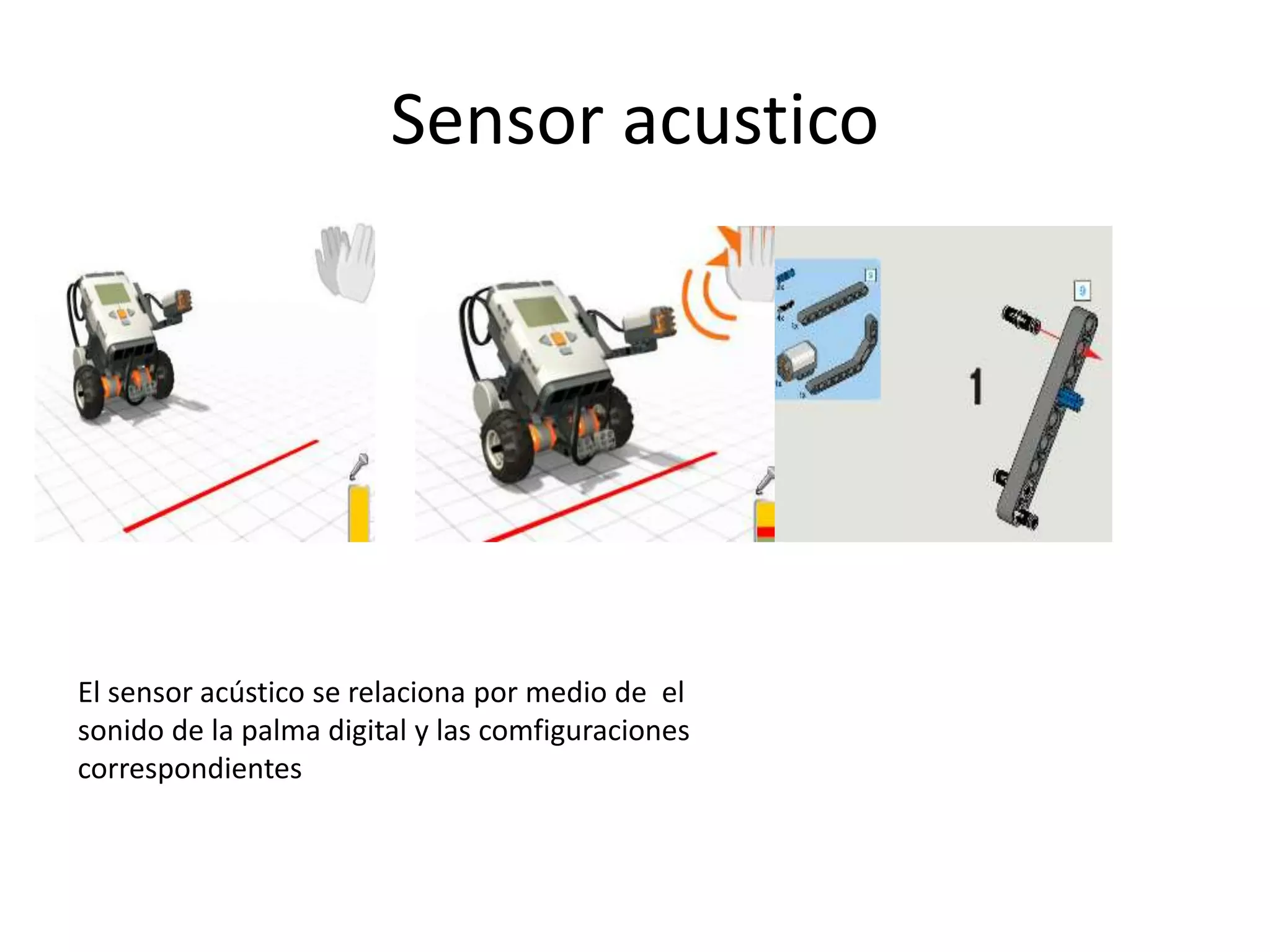
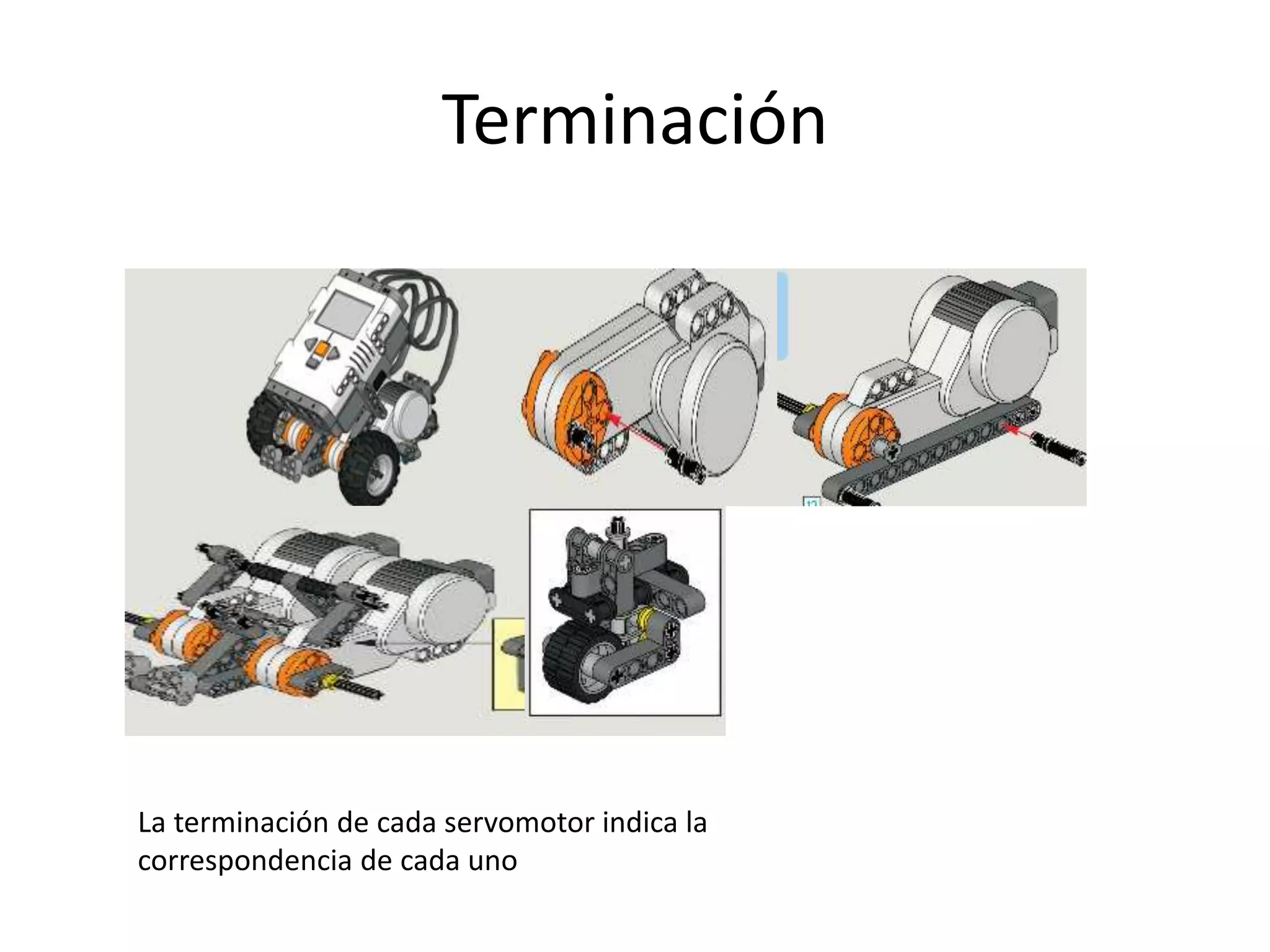
El documento describe la programación de un sensor táctil para un robot, explicando cómo configurarlo para que el robot se detenga o retroceda al tocar un objeto, así como la programación de un sensor acústico y la terminación de los servomotores del robot.