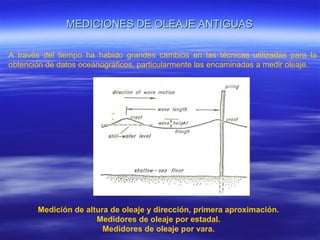
Este documento describe los instrumentos utilizados para medir las olas y las mareas. Explica los principios físicos detrás de los sensores de presión y corrientímetros, así como el funcionamiento de perfiladores acústicos Doppler y boyas oceanográficas. También compara los métodos antiguos y modernos para medir olas y mareas.